大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
Eigen是一个开源的C++库,主要用来支持线性代数,矩阵和矢量运算,数值分析及其相关的算法。Eigen 目前(2022-04-17)最新的版本是3.4.0(发布于2021-08-18),除了C++标准库以外,不需要任何其他的依赖包。Eigen库的下载地址为:https://gitlab.com/libeigen/eigen/-/archive/3.4.0/eigen-3.4.0.zip![]()
 https://gitlab.com/libeigen/eigen/-/archive/3.4.0/eigen-3.4.0.zip1. 如果在Windows平台上运行,请下载.zip压缩包文件,如:
https://gitlab.com/libeigen/eigen/-/archive/3.4.0/eigen-3.4.0.zip1. 如果在Windows平台上运行,请下载.zip压缩包文件,如:
下载好以后,将压缩包重命名为Eigen3,并解压,存放于指定位置,如:E:\Codes_Program\Eigen3。
2. 在Visual Studio(VS)中新建一个项目,并输入测试代码:
#include <iostream>
#include <Eigen/Core>
#include <Eigen/Geometry>
using namespace std;
Eigen::Matrix3d eulerAnglesToRotationMatrix(Eigen::Vector3d& theta);
bool isRotationMatirx(Eigen::Matrix3d R);
Eigen::Vector3d rotationMatrixToEulerAngles(Eigen::Matrix3d& R);
const double ARC_TO_DEG = 57.29577951308238;
const double DEG_TO_ARC = 0.0174532925199433;
int main()
{
// 设定车体欧拉角(角度),绕固定轴
double roll_deg = 0.5; // 绕X轴
double pitch_deg = 0.8; // 绕Y轴
double yaw_deg = 108.5; // 绕Z轴
// 转化为弧度
double roll_arc = roll_deg * DEG_TO_ARC; // 绕X轴
double pitch_arc = pitch_deg * DEG_TO_ARC; // 绕Y轴
double yaw_arc = yaw_deg * DEG_TO_ARC; // 绕Z轴
cout << endl;
cout << "roll_arc = " << roll_arc << endl;
cout << "pitch_arc = " << pitch_arc << endl;
cout << "yaw_arc = " << yaw_arc << endl;
// 初始化欧拉角(rpy),对应绕x轴,绕y轴,绕z轴的旋转角度
Eigen::Vector3d euler_angle(roll_arc, pitch_arc, yaw_arc);
// 使用Eigen库将欧拉角转换为旋转矩阵
Eigen::Matrix3d rotation_matrix1, rotation_matrix2;
rotation_matrix1 = Eigen::AngleAxisd(euler_angle[2], Eigen::Vector3d::UnitZ()) *
Eigen::AngleAxisd(euler_angle[1], Eigen::Vector3d::UnitY()) *
Eigen::AngleAxisd(euler_angle[0], Eigen::Vector3d::UnitX());
cout << "nrotation matrix1 =n" << rotation_matrix1 << endl << endl;
// 使用自定义函数将欧拉角转换为旋转矩阵
rotation_matrix2 = eulerAnglesToRotationMatrix(euler_angle);
cout << "rotation matrix2 =n" << rotation_matrix2 << endl << endl;
// 使用Eigen将旋转矩阵转换为欧拉角
Eigen::Vector3d eulerAngle1 = rotation_matrix1.eulerAngles(2, 1, 0); // ZYX顺序,yaw,pitch,roll
cout << "roll_1 pitch_1 yaw_1 = " << eulerAngle1[2] << " " << eulerAngle1[1]
<< " " << eulerAngle1[0] << endl << endl;
// 使用自定义函数将旋转矩阵转换为欧拉角
Eigen::Vector3d eulerAngle2 = rotationMatrixToEulerAngles(rotation_matrix1); // roll,pitch,yaw
cout << "roll_2 pitch_2 yaw_2 = " << eulerAngle2[0] << " " << eulerAngle2[1]
<< " " << eulerAngle2[2] << endl << endl;
return 0;
}
Eigen::Matrix3d eulerAnglesToRotationMatrix(Eigen::Vector3d& theta)
{
Eigen::Matrix3d R_x; // 计算旋转矩阵的X分量
R_x <<
1, 0, 0,
0, cos(theta[0]), -sin(theta[0]),
0, sin(theta[0]), cos(theta[0]);
Eigen::Matrix3d R_y; // 计算旋转矩阵的Y分量
R_y <<
cos(theta[1]), 0, sin(theta[1]),
0, 1, 0,
-sin(theta[1]), 0, cos(theta[1]);
Eigen::Matrix3d R_z; // 计算旋转矩阵的Z分量
R_z <<
cos(theta[2]), -sin(theta[2]), 0,
sin(theta[2]), cos(theta[2]), 0,
0, 0, 1;
Eigen::Matrix3d R = R_z * R_y * R_x;
return R;
}
bool isRotationMatirx(Eigen::Matrix3d R)
{
double err = 1e-6;
Eigen::Matrix3d shouldIdenity;
shouldIdenity = R * R.transpose();
Eigen::Matrix3d I = Eigen::Matrix3d::Identity();
return (shouldIdenity - I).norm() < err;
}
Eigen::Vector3d rotationMatrixToEulerAngles(Eigen::Matrix3d& R)
{
assert(isRotationMatirx(R));
double sy = sqrt(R(0, 0) * R(0, 0) + R(1, 0) * R(1, 0));
bool singular = sy < 1e-6;
double x, y, z;
if (!singular)
{
x = atan2(R(2, 1), R(2, 2));
y = atan2(-R(2, 0), sy);
z = atan2(R(1, 0), R(0, 0));
}
else
{
x = atan2(-R(1, 2), R(1, 1));
y = atan2(-R(2, 0), sy);
z = 0;
}
return { x, y, z };
}
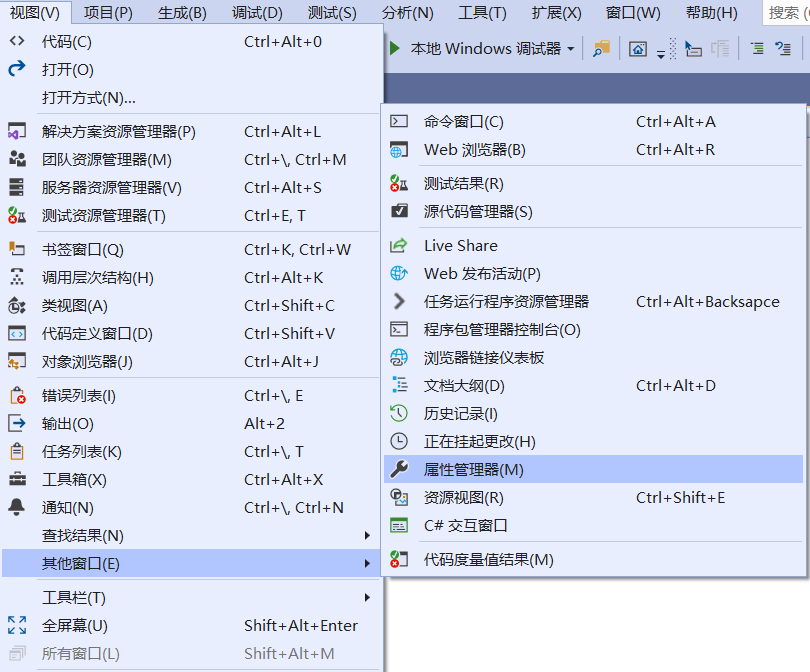
3. 依次点击:视图 –> 其他窗口 –> 属性管理器
4. 依次选择:Debug | x64 -> VC++目录 -> 包含目录,并在包含目录中输入Eigen3文件夹的位置,如: E:\Codes_Program\Eigen3

5. 在工具栏设置:Debug、x64,即可使用Eigen库。

发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/183932.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
