大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
STM32库函数开发系列文章目录
第一篇:STM32F103ZET6单片机双串口互发程序设计与实现
第二篇:最简单DIY基于STM32单片机的蓝牙智能小车设计方案
文章目录
前言
daodanjishui物联网核心原创技术之最简单DIY基于STM32单片机的蓝牙智能小车设计方案。
市面上有各种开源STM32蓝牙智能小车,但是有复杂的有简单的,如果想快速入门STM32蓝牙智能小车,这个方案会给你一个快捷高效的方案。
一、最简单DIY基于STM32单片机的蓝牙智能小车设计方案是什么?
单片机初学者用串口来调试程序是非常方便的,用什么仿真器,用什么寄存器等等都不如串口打印来得方便快捷。在第一篇就是介绍了STM32串口互发程序,现在用串口蓝牙模块与单片机构成串口通信,调试的方式就涉及到第一篇的技术。
在51单片机智能小设计专栏中的第一篇博文:最简单DIY的51蓝牙遥控小车设计方案讲述了用51单片机如何制作无线蓝牙智能小车。有些读者也觉得拿个51来做智能小车可扩展程度太低了,所以我这次推出了开源收费版的STM32蓝牙智能小车,采用双层透明亚克力板结构,使用带有数码管显示的电源,带有独立开关的L298N模块,一片STM32F103C8T6作为主控,两个18650高能锂电池供电,一个HC05串口蓝牙模块,三根铜柱把第二层的亚克力板撑起来了,整个小车结构都由我手工设计和搭建,看起来就像是一个艺术品。下面请看全家福:
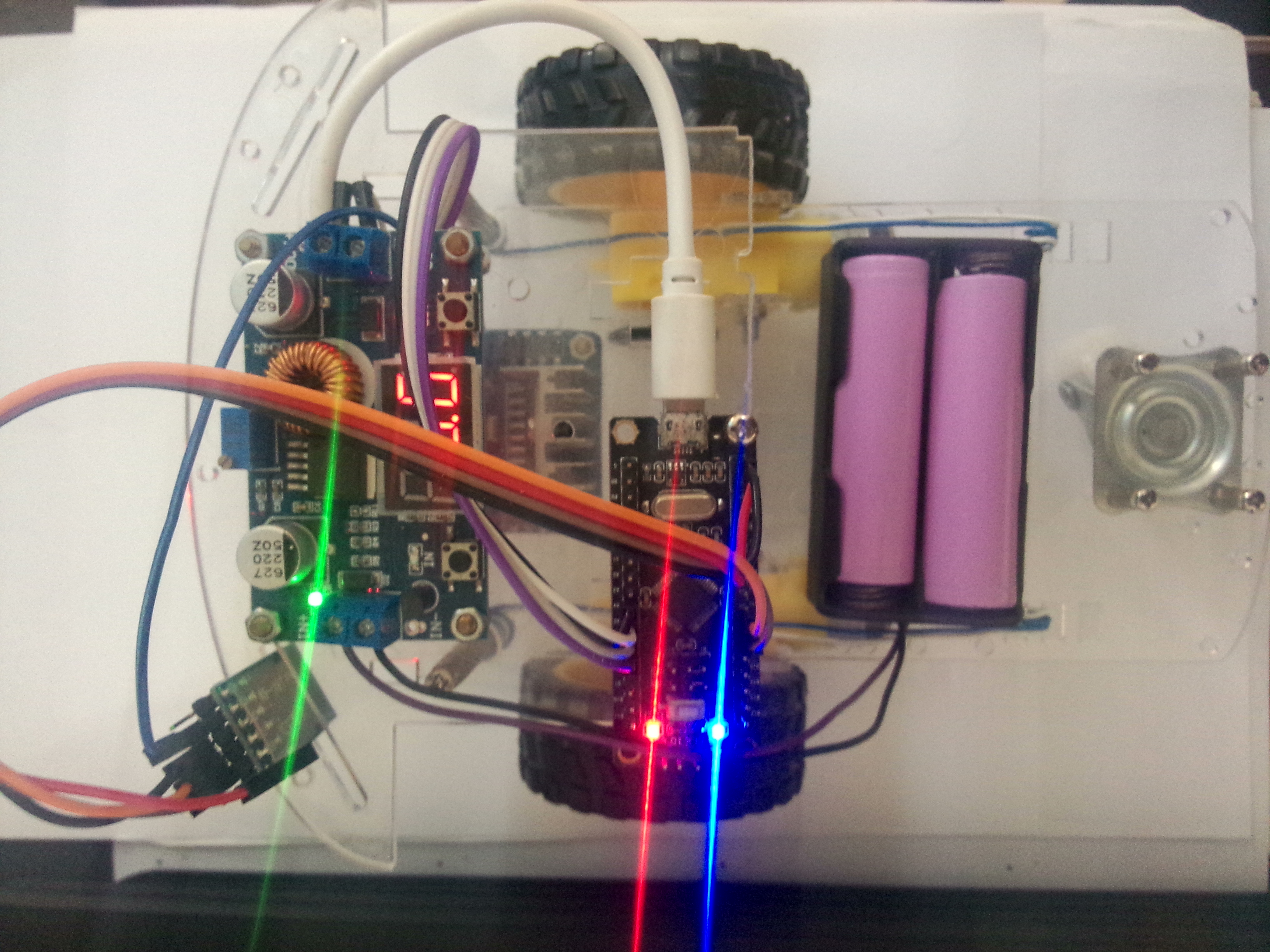

再来第一个侧身照:
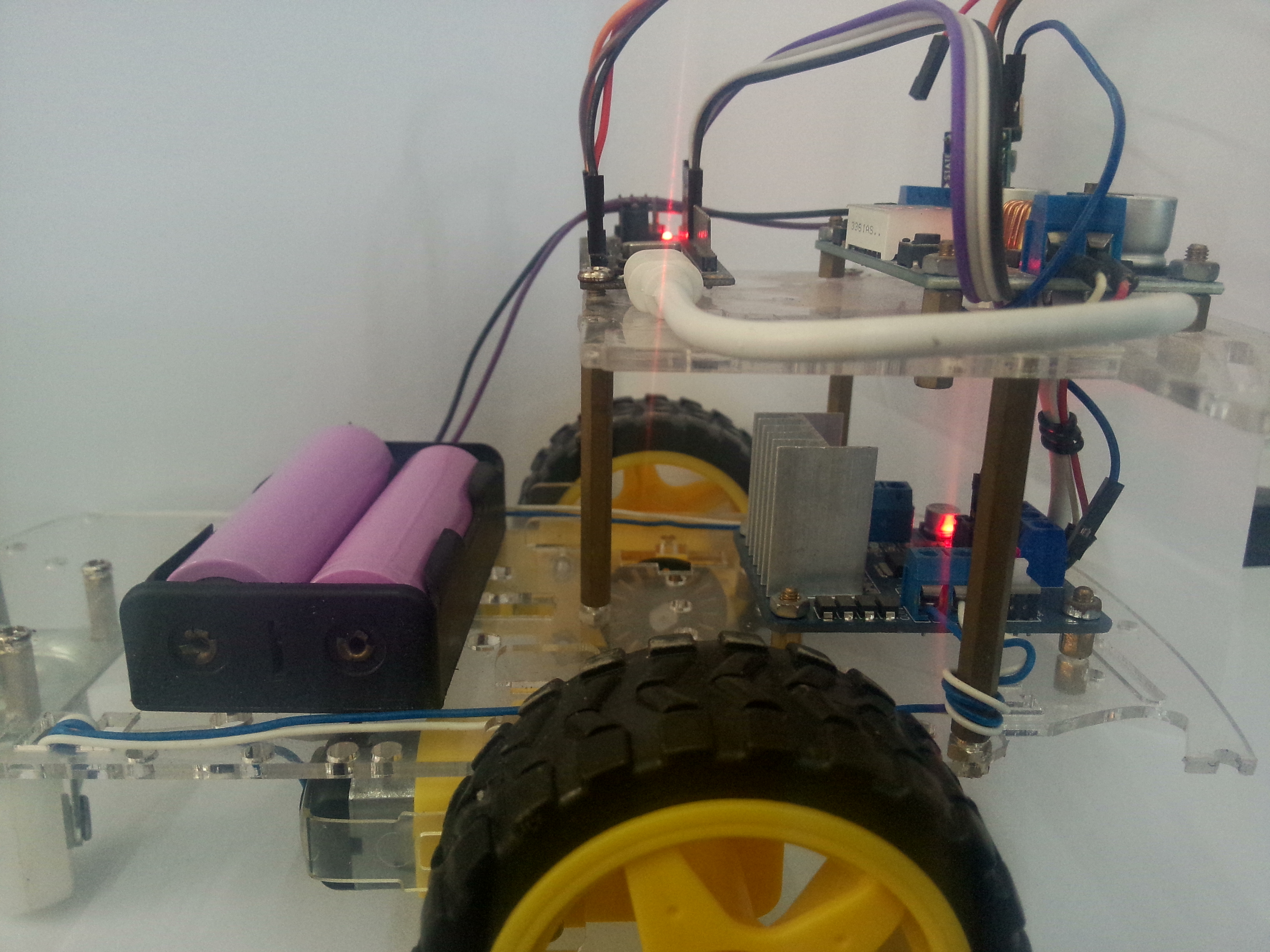
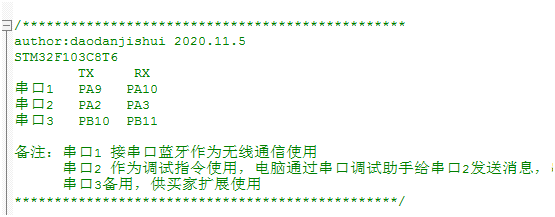
功能描述:这次的小车功能拓展提高了很多,首先支持三个串口同时使用,我定义串口一接蓝牙模块,串口二作为调试使用,串口三留给买家自行扩展,需要注意的是:stm32触发串口中断需要加入 \r\n,串口1是与蓝牙模块链接的,stm32的串口1中断必须接收到\r\n 才能触发串口中断,十六进制就是 0d 0a,串口1收到的数据会通过串口2输出到电脑调试助手,这样用串口2可以调试程序,看看串口1的蓝牙是否接收到数据另外给串口2发送数据的话,串口2会返回相同的数据,同时串口2也往串口1发送数据,这样也可以测试蓝牙模块是否能回复给蓝牙调试助手。
优酷视频演示地址:https://v.youku.com/v_show/id_XNDk2MjQ4MTM3Mg==.html
直接观看
最简单DIY基于STM32单片机的蓝牙智能小车设计方案
二、使用步骤
1.准备硬件
这个STM32智能蓝牙小车其实跟51智能蓝牙智能小车唯一区别的是核心板更换了,其他硬件保持一致,所以不懂的买家可以看看最简单DIY的51蓝牙遥控小车设计方案
现在还是列出硬件的列表:按照实物图购买响应的模块组装成小车,L298N,电源模块,电池夹和18650电池两个,电源变压器、STM32F103C8T6单片机最小系统板、HC05串口蓝牙模块、小车底座。
2.准备一个串口通信的代码
我采用库函数开发,所以代码直接使用第一篇中的开源源码。
代码如下(示例):
#include "led.h"
#include "delay.h"
#include "key.h"
#include "sys.h"
#include "usart.h"
#include "usart2.h"
//串口实验
//技术支持:daodanjishui
int main(void)
{
u8 t;
u8 len;
u8 len2;
delay_init(); //延时函数初始化
NVIC_Configuration(); //设置NVIC中断分组2:2位抢占优先级,2位响应优先级
uart_init(9600); //串口初始化为9600
uart2_init(9600);
//LED_Init(); //LED端口初始化
//KEY_Init(); //初始化与按键连接的硬件接口
while(1)
{
if(USART_RX_STA&0x8000)
{
len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度
/* //因为我这里要把气象站的数据传回来,所以不能直接返回数据给气象站,否则可能出错 printf("电脑 send to串口1的数据为:\r\n"); for(t=0;t<len;t++) { USART_SendData(USART1, USART_RX_BUF[t]);//单片机通过串口1发送数据给电脑 while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束 //printf("\r\n发送成功\r\n");//插入换行 } printf("\r\n");//插入换行 */
u2_printf("电脑 send to串口2的数据为:\r\n");
for(t=0;t<len;t++)
{
USART_SendData(USART2, USART_RX_BUF[t]);//将串口1收到的数据转发给串口2输出
while(USART_GetFlagStatus(USART2,USART_FLAG_TC)!=SET);//等待发送结束
}
u2_printf("\r\n");//插入换行
USART_RX_STA=0;
}
if(USART2_RX_STA&0x8000)
{
len2=USART2_RX_STA&0x3fff;//得到此次接收到的数据长度
u2_printf("电脑 send to串口2的数据为:\r\n");
for(t=0;t<len2;t++)
{
USART_SendData(USART2, USART2_RX_BUF[t]);//单片机通过串口2给电脑发数据
while(USART_GetFlagStatus(USART2,USART_FLAG_TC)!=SET);//等待发送结束
}
u2_printf("\r\n");//插入换行
//printf("电脑 send to串口1的数据为:\r\n");
printf("\r\n");//作为指令响应的开头
for(t=0;t<len2;t++)
{
USART_SendData(USART1, USART2_RX_BUF[t]);//将串口2收到的数据转发给串口1输出
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
}
printf("\r\n");//插入换行
USART2_RX_STA=0;
}
}
}
3.修改源码
因为智能小车不仅仅是设计到串口信息的收发,还涉及到指令的解析和车轮电机的执行。所以需要在原来代码的基础上加上:
(1)指令解析的代码如下
if(USART_RX_STA&0x8000)
{
len=USART_RX_STA&0x3fff;//得到此次接收到的数据长度
//printf("电脑 send to串口1的数据为:\r\n");
for(t=0;t<len;t++)// 这里要将电脑给串口发送的东西全部返回
{
USART_SendData(USART1, USART_RX_BUF[t]);//单片机通过串口1发送数据给电脑?
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
// printf("\r\n发送成功\r\n");//插入换行
}
printf("\r\n");//插入换行
//在这里加入控制车的逻辑
//p1=strstr((const char*)USART3_RX_BUF,(const char*)"ID0:");
if(strstr((const char*)USART_RX_BUF,"FFF")!=NULL){
flag=0;
}else if(strstr((const char*)USART_RX_BUF,"BBB")!=NULL){
flag=1;
}else if(strstr((const char*)USART_RX_BUF,"LLL")!=NULL){
flag=2;
}else if(strstr((const char*)USART_RX_BUF,"RRR")!=NULL){
flag=3;
}else if(strstr((const char*)USART_RX_BUF,"SSS")!=NULL){
flag=4;
}else flag=4;
switch (flag)
{
case 0: {
front(); u2_printf("FFF\r\n");printf("FFF\r\n");break;}//串口收到前进
case 1: {
back();u2_printf("BBB\r\n");printf("BBB\r\n");break;}
case 2: {
left();u2_printf("LLL\r\n");printf("LLL\r\n");break; }
case 3: {
right();u2_printf("RRR\r\n");printf("RRR\r\n");break;}
case 4: {
stop();u2_printf("SSS\r\n"); printf("SSS\r\n");break;}
default:
stop();
u2_printf("SSS\r\n");
break;
}
//USART_RX_STA=0;
//车控制结束
u2_printf("单片机串口2发出的数据为:\r\n");
for(t=0;t<len;t++)
{
USART_SendData(USART2, USART_RX_BUF[t]);//单片机通过串口2给电脑发送数据
while(USART_GetFlagStatus(USART2,USART_FLAG_TC)!=SET);//等待发送结束
}
u2_printf("\r\n");
USART_RX_STA=0;
}
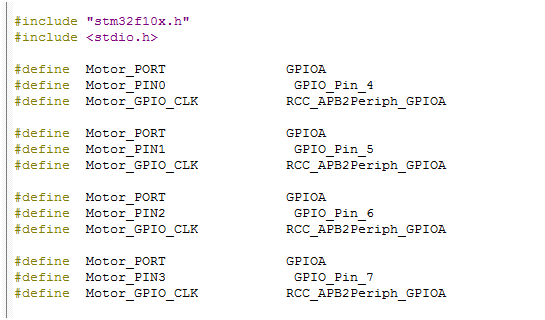
(2)动作执行的代码如下
#include "output.h"
#include "delay.h"
void Motor_GPIO_Init(void)
{
GPIO_InitTypeDef Init_Instructure;
RCC_APB2PeriphClockCmd(Motor_GPIO_CLK ,ENABLE );
Init_Instructure.GPIO_Mode=GPIO_Mode_Out_PP;
Init_Instructure.GPIO_Pin=Motor_PIN0;
Init_Instructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(Motor_PORT,&Init_Instructure );
Init_Instructure.GPIO_Pin=Motor_PIN1;
GPIO_Init(Motor_PORT,&Init_Instructure );
Init_Instructure.GPIO_Pin=Motor_PIN2;
GPIO_Init(Motor_PORT,&Init_Instructure );
Init_Instructure.GPIO_Pin=Motor_PIN3;
GPIO_Init(Motor_PORT,&Init_Instructure );
}
void back(void)
{
Motor_PIN0_0;
Motor_PIN1_1;
Motor_PIN2_1 ;
Motor_PIN3_0;
delay_ms(1000);
stop();
}
//PA0~3接到L298N的IN1~4
void front(void)
{
Motor_PIN0_1;//PA0置1
Motor_PIN1_0;//PA1置0
Motor_PIN2_0;//PA2置0
Motor_PIN3_1;//PA3置1
delay_ms(1000);
stop();
}
void left(void)
{
Motor_PIN0_1;
Motor_PIN1_0;
Motor_PIN2_0;
Motor_PIN3_0;
delay_ms(200);
stop();
}
void right(void)
{
Motor_PIN0_0;
Motor_PIN1_0;
Motor_PIN2_0;
Motor_PIN3_1;
delay_ms(200);
stop();
}
void stop(void)
{
Motor_PIN0_0;
Motor_PIN1_0;
Motor_PIN2_0;
Motor_PIN3_0;
}
三、运行与调试
-
根据源码接线
-
-
按照实物图购买响应的模块组装成小车,L298N,电源模块,电池夹和18650电池两个,电源变压器、51单片机最小系统板、HC05串口蓝牙模块、小车底座
-
根据源码接线,烧录程序进单片机
大概的接线关系是蓝牙模块接单片机的串口:蓝牙模块rxd接单片机PA9
Txd接单片机PA10,L298N四个in管脚接单片机PA4,PA5,PA6,PA7四个管脚 -
安装手机安卓蓝牙调试助手
-
小车通电
-
打开手机蓝牙和蓝牙调试助手
-
搜索小车的蓝牙模块,链接上小车蓝牙
-
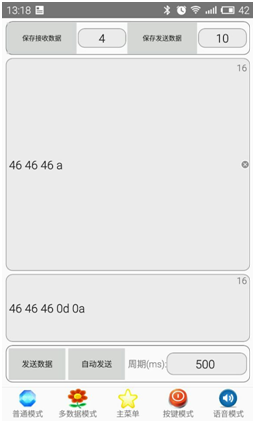
发送十六进制指令,因为小车接收指令 要加\r\n作为结束符号
所以指令后面要加上十六进制0d 0a
比如FFF\r\n是前进,指令转化为十六进制是 4646460d0a
下面是后退:BBB\r\n 指令转化为十六进制是
下面是左转: LLL\r\n

最后是右转: RRR\r\n
现在重点介绍串口互发的调试过程:
1.启动小车电源,用USB转TTL线接到stm32单片机的串口2,用手机蓝牙调试助手控制小车前进,发送FFF,然后在串口2就会打印出FFF,再发送SSS,就打印SSS。说明串口1接收蓝牙指令和串口2发出指令,电脑收到串口2的信息再打印出来。

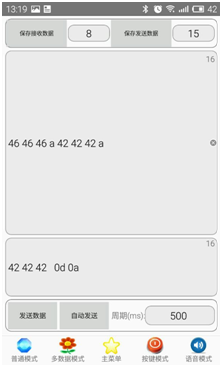
2.通过电脑调试助手给串口2发送BBB,发现手机蓝牙调试助手收到了BBB,说明了串口2接收串口1发出。串口1发出的信息传到手机蓝牙显示收到了BBB。

总结:通过1和2,我们通过双串口实现了互发来调试了智能小车。
总结
通过上面运行与调试证明了小车运行状态良好,达到博文提出的要求。
有些读者说:为什么不用手机app来控制智能小车而是要用蓝牙调试助手发指令去控制呢?其实我已经推出万能蓝牙遥控器,它可以安装在安卓手机上控制这个stm32智能小车,也能控制51智能小车和钢铁爱国者机关枪。支持三种方式控制:第一种是指令控制;第二种是方向键控制;第三种是重力传感器控制,配备蓝牙智能搜索和链接,指令反馈显示等功能,有需求的读者请访问我:最简单DIY基于Android系统的万能蓝牙设备智能遥控器。
观看优酷视频地址:https://v.youku.com/v_show/id_XNDk2MDk5NDE5Ng==.html?spm=a2hbt.13141534.app.55!25!2555!255!25!25!255!25A
直接观看
stm32智能蓝牙小车控制
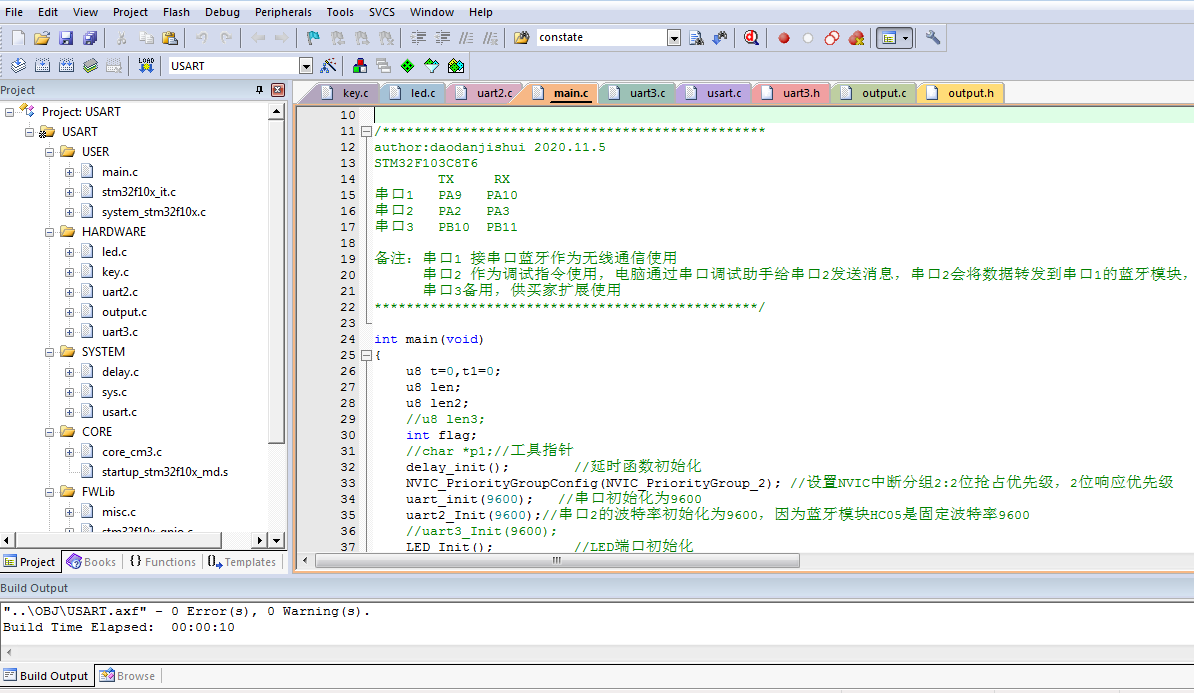
小车源码工程截图:
最后附上本博文代码下载地址:https://www.cirmall.com/circuit/21240/
直接跳转
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/183536.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
