大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
导读
上一篇通俗易懂的Spatial Transformer Networks(STN)(一)中,我们详细介绍了STN中会使用到的几个模块,并且用pytorch和numpy来实现了,这篇文章我们将会利用pytorch来实现一个MNIST的手写数字识别并且将STN模块嵌入到CNN中
STN关键点解读
STN有一个最大的特点就是STN模块能够很容易的嵌入到CNN中,只需要进行非常小的修改即可。上一篇文章我们也说了STN拥有平移、旋转、剪切、缩放等不变性,而这一特点主要是依赖 θ \theta θ参数来实现的。刚开始的时候我还以为训练STN还需要准备 θ \theta θ标签数据,实际上并不需要。
当输入图片通过STN模块之后获得变换后的图片,然后我们再将变换后的图片输入到CNN网络中,通过损失函数计算loss,然后计算梯度更新 θ \theta θ参数,最终STN模块会学习到如何矫正图片。
代码实现
- 导包
import torch,torchvision
import matplotlib.pyplot as plt
import torch.nn as nn
import torch.nn.functional as F
import torch.optim as optim
from torchvision import datasets,transforms
import numpy as np
from torchsummary import summary
import argparse
- 定义网络结构
class STN_Net(nn.Module):
def __init__(self,use_stn=True):
super(STN_Net, self).__init__()
self.conv1 = nn.Conv2d(1,10,kernel_size=5)
self.conv2 = nn.Conv2d(10,20,kernel_size=5)
self.conv2_drop = nn.Dropout2d()
self.fc1 = nn.Linear(320,50)
self.fc2 = nn.Linear(50,10)
#用来判断是否使用STN
self._use_stn = use_stn
#localisation net
#从输入图像中提取特征
#输入图片的shape为(-1,1,28,28)
self.localization = nn.Sequential(
#卷积输出shape为(-1,8,22,22)
nn.Conv2d(1,8,kernel_size=7),
#最大池化输出shape为(-1,1,11,11)
nn.MaxPool2d(2,stride=2),
nn.ReLU(True),
#卷积输出shape为(-1,10,7,7)
nn.Conv2d(8,10,kernel_size=5),
#最大池化层输出shape为(-1,10,3,3)
nn.MaxPool2d(2,stride=2),
nn.ReLU(True)
)
#利用全连接层回归\theta参数
self.fc_loc = nn.Sequential(
nn.Linear(10 * 3 * 3,32),
nn.ReLU(True),
nn.Linear(32,2*3)
)
self.fc_loc[2].weight.data.zero_()
self.fc_loc[2].bias.data.copy_(torch.tensor([1,0,0,0,1,0]
,dtype=torch.float))
def stn(self,x):
#提取输入图像中的特征
xs = self.localization(x)
xs = xs.view(-1,10*3*3)
#回归theta参数
theta = self.fc_loc(xs)
theta = theta.view(-1,2,3)
#利用theta参数计算变换后图片的位置
grid = F.affine_grid(theta,x.size())
#根据输入图片计算变换后图片位置填充的像素值
x = F.grid_sample(x,grid)
return x
def forward(self,x):
#使用STN模块
if self._use_stn:
x = self.stn(x)
#利用STN矫正过的图片来进行图片的分类
#经过conv1卷积输出的shape为(-1,10,24,24)
#经过max pool的输出shape为(-1,10,12,12)
x = F.relu(F.max_pool2d(self.conv1(x),2))
#经过conv2卷积输出的shape为(-1,20,8,8)
#经过max pool的输出shape为(-1,20,4,4)
x = F.relu(F.max_pool2d(self.conv2_drop(self.conv2(x)),2))
x = x.view(-1,320)
x = F.relu(self.fc1(x))
x = F.dropout(x,training=self.training)
x = self.fc2(x)
return F.log_softmax(x,dim=1)
- 加载数据集
def get_dataloader(batch_size):
# 加载数据集
# 如果GPU可用就用GPU,否则用CPU
device = torch.device("cuda" if torch.cuda.is_available()
else "cpu")
# 加载训练集
train_dataloader = torch.utils.data.DataLoader(
datasets.MNIST(root="D:/dataset", train=True, download=True,
transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])), batch_size=batch_size, shuffle=True)
# 加载测试集
test_dataloader = torch.utils.data.DataLoader(
datasets.MNIST(root="D:/dataset", train=False,
transform=transforms.Compose([
transforms.ToTensor(),
transforms.Normalize((0.1307,), (0.3081,))
])), batch_size=batch_size, shuffle=True)
return train_dataloader,test_dataloader
- 训练模型
def train(net,epoch_nums,lr,train_dataloader,per_batch,device):
#使用训练模式
net.train()
#选择梯度下降优化算法
optimizer = optim.SGD(net.parameters(),lr=lr)
#训练模型
for epoch in range(epoch_nums):
for batch_idx,(data,label) in enumerate(train_dataloader):
data,label = data.to(device),label.to(device)
optimizer.zero_grad()
pred = net(data)
loss = F.nll_loss(pred,label)
loss.backward()
optimizer.step()
if batch_idx % per_batch == 0:
print("Train Epoch:{
} [{
}/{
} ({
:.0f}%)]\tLoss:
{
:.6f}".format(epoch,batch_idx * len(data),
len(train_dataloader.dataset),
100. * batch_idx /len(train_dataloader),loss.item()))
- 评估模型
def evaluate(net,test_dataloader,device):
with torch.no_grad():
#使用评估模式
net.eval()
eval_loss = 0
eval_acc = 0
for data,label in test_dataloader:
data,label = data.to(device),label.to(device)
pred = net(data)
eval_loss += F.nll_loss(pred,label,
size_average=False).item()
pred_label = pred.max(1,keepdim=True)[1]
eval_acc += pred_label.eq(label.view_as(pred_label)
).sum().item()
eval_loss /= len(test_dataloader.dataset)
print("evaluate set: Average loss: {
:.4f},Accuracy:{
}/{
}
({
:.2f}%)\n".format(
eval_loss,eval_acc,len(test_dataloader.dataset),
100*eval_acc / len(test_dataloader.dataset)))
- 将pytorch的tensor转换为numpy的array
def tensor_to_array(img_tensor):
img_array = img_tensor.numpy().transpose((1,2,0))
mean = np.array([0.485,0.456,0.406])
std = np.array([0.229,0.224,0.225])
img_array = std * img_array + mean
img = np.clip(img_array,0,1)
return img
- 可视化STN变换图片
def visualize_stn(net,dataloader,device):
with torch.no_grad():
data = next(iter(dataloader))[0].to(device)
input_tensor = data.cpu()
t_input_tensor = net.stn(data).cpu()
in_grid = tensor_to_array(torchvision.utils.make_grid(
input_tensor))
out_grid = tensor_to_array(torchvision.utils.make_grid(
t_input_tensor))
f,axarr = plt.subplots(1,2)
axarr[0].imshow(in_grid)
axarr[0].set_title("input images")
axarr[1].imshow(out_grid)
axarr[1].set_title("stn transformed images")
plt.show()
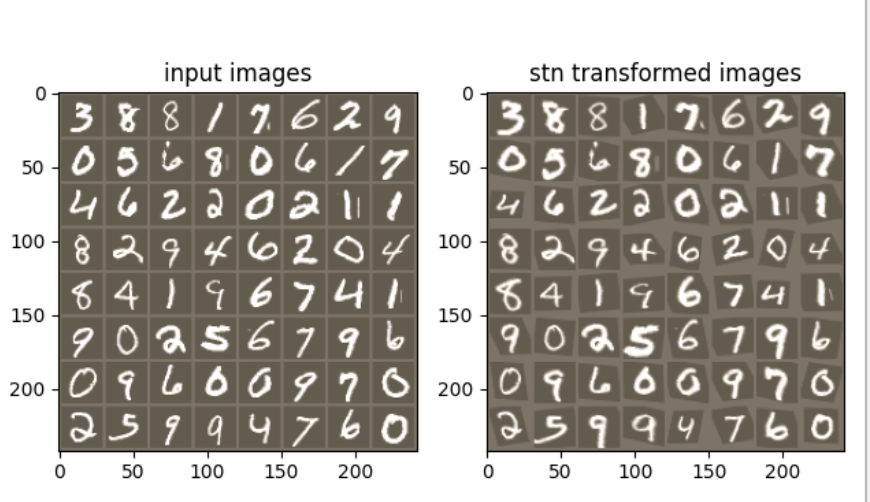

通过对比输入图片和经过STN变换后的图片能够很明显发现,经过STN之后能将旋转的图片进行明显的纠正。
- 参数设置
def parse_args():
parse = argparse.ArgumentParser("config stn args")
parse.add_argument("--lr",default=0.01,
type=float,help="learning rate")
parse.add_argument("--epoch_nums",default=20,
type=int,help="iterated epochs")
parse.add_argument("--use_stn",default=True,
type=bool,help="whether to use STN module")
parse.add_argument("--batch_size",default=64,
type=int,help="batch size")
parse.add_argument("--use_eval",default=True,
type=bool,help="whether to evaluate")
parse.add_argument("--use_visual",default=True,
type=bool,help="visual STN transform image")
parse.add_argument("--use_gpu",default=True,
type=bool,help="whether to use GPU")
parse.add_argument("--show_net_construct",default=False,
type=bool,help="print net construct info")
return parse.parse_args()
- 主函数
if __name__ == "__main__":
args = parse_args()
if args.use_gpu and torch.cuda.is_available():
device = "cuda"
else:
device = "cpu"
#加载数据集
train_loader,test_loader = get_dataloader(args.batch_size)
#创建网络
net = STN_Net(args.use_stn).to(device)
#打印网络的结构信息
if args.show_net_construct:
summary(net,(1,28,28))
#训练模型
train(net,args.epoch_nums,args.lr,train_loader
,args.batch_size,device)
if args.use_eval:
#评估模型
evaluate(net,test_loader,device)
if args.use_visual:
#可视化展示效果
visualize_stn(net,test_loader,device)
参考:https://pytorch.org/tutorials/intermediate/spatial_transformer_tutorial.html
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/183487.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
