大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
描述
先看下传统的CS模型,如下:
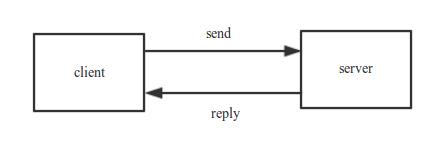

总是一方发起请求,等待另一方回应。当一次传输完成之后,client端发起新的请求之后,server端才作出回应。 那如何才能做到双向通信? 一种解决办法就是client端即使client,又是server,server端即使client也是server,如下:
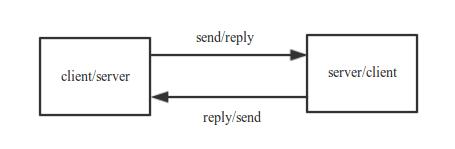
但是上述方面比较复杂,这时候就引入要分析的socketpair了。
socketpair用于创建一对相互连接的unnamed socket。而pipe系统调用使用创建的pipe也是相互连接的unnamed pipe(无名管道)。而pipe和socketpair创建的描述符之间的区别就是: pipe创建的描述符一端只能用于读,一端用于写,而socketpair创建的描述符任意一端既可以读也可以写。
原理
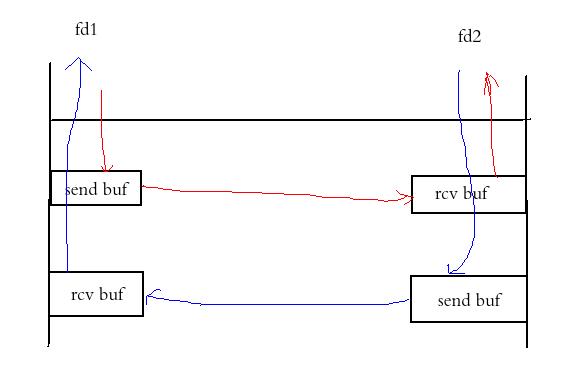
使用socketpiar创建的是一对相互连接的socket,任意一段既可以做发送,也可以做接受端。所有每个socket描述符中应该有两个buf。一个为发送buf,一个为接受buf。如上图所示。
示例代码:
#include <stdio.h>
#include <sys/types.h>
#include <sys/socket.h>
#include <pthread.h>
#define SOCKET_BUFFER_SIZE (32768U)
void *thread_function(void *arg)
{
int len = 0;
int fd = *((int*)(arg));
char buf[500];
int cnt = 0;
/*主线程*/
while(1)
{
/*向main thread线程发送数据*/
len = sprintf(buf, "Hi, main process, cnt = %d", cnt++);
write(fd, buf, len);
/*读数据*/
len = read(fd, buf, 500);
buf[len]='\0';
printf("%s\n",buf);
sleep(5);
}
return NULL;
}
int main()
{
int ret;
int sockets[2];
int bufferSize = SOCKET_BUFFER_SIZE;
pthread_t thread;
ret = socketpair(AF_UNIX, SOCK_SEQPACKET, 0, sockets);
if(ret == -1)
{
printf("socketpair create error!\n");
return -1;
}
/*设置socket描述符的选项*/
setsockopt(sockets[0], SOL_SOCKET, SO_SNDBUF, &bufferSize, sizeof(bufferSize));
setsockopt(sockets[0], SOL_SOCKET, SO_RCVBUF, &bufferSize, sizeof(bufferSize));
setsockopt(sockets[1], SOL_SOCKET, SO_SNDBUF, &bufferSize, sizeof(bufferSize));
setsockopt(sockets[1], SOL_SOCKET, SO_RCVBUF, &bufferSize, sizeof(bufferSize));
/*创建线程1*/
pthread_create(&thread, NULL, thread_function, (void*)(&sockets[1]));
int len = 0;
int fd = sockets[0];
char buf[500];
int cnt = 0;
/*主线程*/
while(1)
{
/*读数据*/
len = read(fd, buf, 500);
buf[len]='\0';
printf("%s\n",buf);
/*项thread线程发送数据*/
len = sprintf(buf, "Hi, thread process, cnt = %d", cnt++);
write(fd, buf, len);
}
return 0;
}测试结果:
1. 编译代码
gcc socketpair.c -o socketpair -lpthread2. 运行,查看结果
test$ ./socketpair
Hi, main process, cnt = 0
Hi, thread process, cnt = 0
Hi, main process, cnt = 1
Hi, thread process, cnt = 1
Hi, main process, cnt = 2
Hi, thread process, cnt = 2
注意: socketpair创建的只适用于父子进程或者线程间通信,不能用于两个进程之间通信。如果要实现两个进程之间的双向通信,则需要将socketpair创建的一个描述符fd发送给另一个进程,这相当于两个两个不同的进程访问同一个文件。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/181941.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
