大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
一、SPI协议
1、SPI协议概括
SPI(Serial Peripheral Interface)——串行外围设备接口。是Motorola首先在其MC68HCXX系列处理器上定义的。SPI接口主要应用在EEPROM、FLASH、实时时钟,AD转换器以及数字信号处理器和数字信号解码器之间。SPI是一种高速,全双工,同步的通信总线,在芯片上只占用四根线(CS、MOSI、MISO、SCK),极大的节约了芯片的引脚。
2、SPI物理层
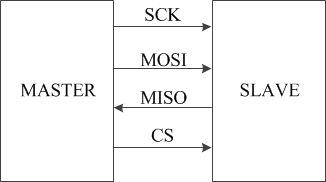
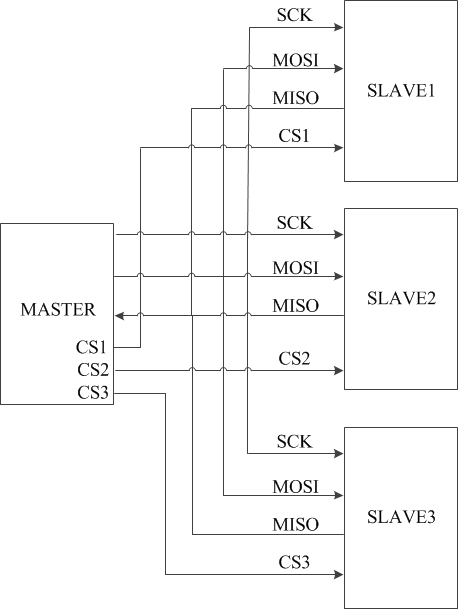
SPI的通信原理很简单,它以主从方式工作,这种模式通常有一个主设备和一个或者多个从设备。图1是一个主设备一个从设备的物理连接示意图。图中SCK是由主设备发送给从的时钟,该时钟决定了主设备发送数据的速率;MOSI是主设备发送给从设备的数据;MISO是从设备发送给主设备的数据;CS是片选信号,即只有片选信号为预先规定的使能信号时(高电平或者低电平)对此芯片的操作才有效。

3、SPI协议层
SPI通信是四线串行通信,也就是说数据是一位一位传输的。这也即是SCK存在的意义,SCK提供通信所需的时钟脉冲,MOSI和MISO则基于此时钟进行数据传输。数据输出通过MOSI线,数据在时钟的上升沿或下降沿时改变,在紧接着的下降沿或者上升沿被读取。完成一位数据传输,输入也使用同样原理。这样,至少在8次时钟信号的改变(上升沿和下降沿为一次),就可以实现8位数据的传输。
需要注意的是,SCK信号线只由主设备控制,从设备不能控制信号线。同样,在一个基于SPI的设备中,至少要有一个主控设备。这样传输的特点:此传输方式有一个优点,与普通串行通信不同,普通的串行通信一次连续传送至少8位数据,而SPI允许数据一位一位的传送,甚至允许暂停,因为SCK时钟线由主控设备控制,当没有时钟跳变时,从设备不采集或传送数据。也就是说,主设备通过对SCK时钟线的控制可以完成对通信的控制。SPI协议还可以实现数据的交换:因为SPI的数据输入和输出线独立所以允许同时完成数据的输入和输出。不同的SPI设备的实现方式不尽相同,主要时改变和采集数据的时间不同,在时钟信号上升沿或下降沿采集有不同的定义。
SPI总线有四种工作方式(SPI0、SPI1、SPI2、SPI3),其中使用的最为广泛的是SPI0和SPI3方式。
SPI模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位(CPHA)能够配置用于选择两种不同的传输协议之一进行数据传输。如果CPHA=0,在串行同步时钟的第一个跳变沿(上升沿或下降沿)数据被采集;如果CPHA=1,在串行同步时钟的第二个跳变沿(上升沿或下降沿)数据被采集。SPI主模块和与之通信的外设时钟相位和极性应该一致。
SPI时序图详解:SPI接口有四种不同的数据传输时序,取决于CPOL和CPHA的组合。图3中给出了这四种时序,时序与CPOL和CPHA的关系也可以从图中看出。
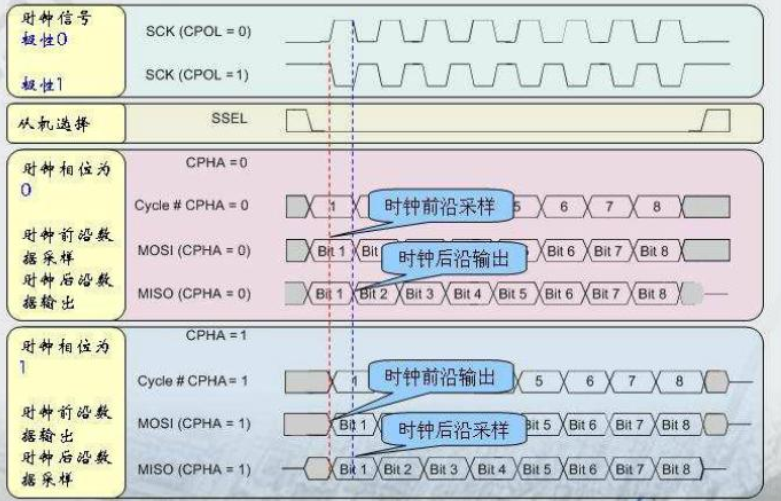
图3中可以看出,CPOL是用来决定SCK时钟信号空闲时的电平。CPOL=0,SCK空闲时为低电平;CPOL=1,SCK空闲时为高电平。CPHA是用来决定采样输入数据MISO时刻,CPHA = 0,在第一个SCK时钟沿进行数据采样;CPHA=1,在第二个SCK时钟沿进行数据采集。(工作模式的确定:由SLAVE的工作模式确定MASTER的工作模式)。
二、SPI协议使用举例
这里通过使用SPI3来实现主机发送数据。

在SPI3模式下,CPOL = 1,CPHA = 1。SCK在空闲时为高电平,在SCK的第二个时钟沿从机进行数据的采集(只考虑主机发送情况),在SCK的第一个时钟沿发送数据MOSI。
三、使用verilog实现SPI3工作模式的时序
1、SPI3模式下工作过程如下图所示,
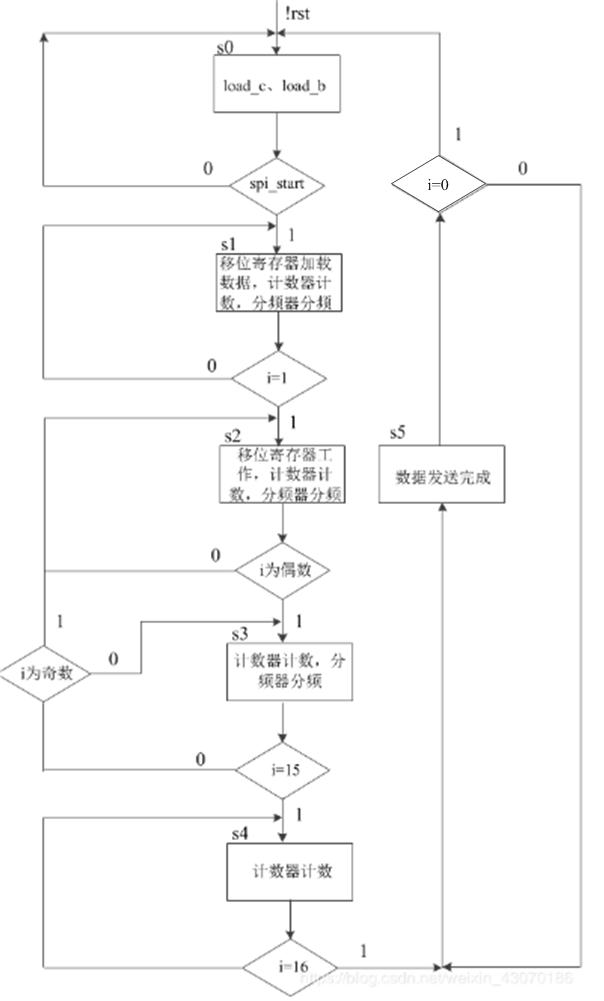
接下来分析图5所示SPI发送数据的过程,首先在复位信号到来时,进入s0状态,在s0状态计数器和分频器模块加载初始值,如果发送数据开始信号spi_start有效进入s1状态,s1状态加载待发送的数据,同时计数器计数计数,分频器开始工作,如果i=1,进入s2状态,s2状态主要用来发送数据,如果i为偶数,进入s3状态,该状态是用来采集数据,由于只考虑发送,因此此模块不进行数据采集工作,如果i=15,进入s4状态,否则如果i为奇数,则进入s2状态。;在s4状态,发送最后一位数据,如果i=16,进入s5状态,此时整个SPI时序模拟完成。
2、数据路径
由图5可知,构成SPI发送时序的基本电路块包括计数器,移位寄存器和触发器模块。
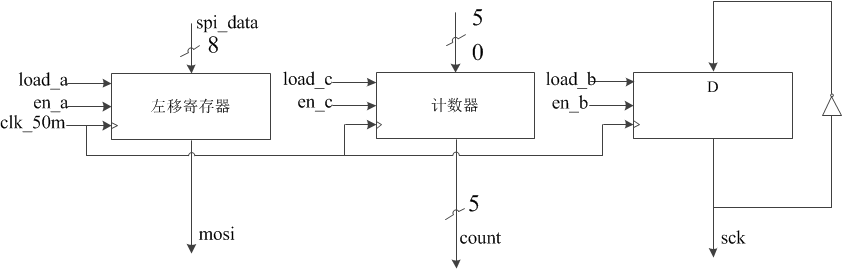
图6中,左移寄存器将8位的待发送的数据spi_data转换为串行的数据mosi一位一位的发送出去,计数器用来计数发送数据的个数,触发器用来产生分频后的sck时钟信号。
3、控制信号
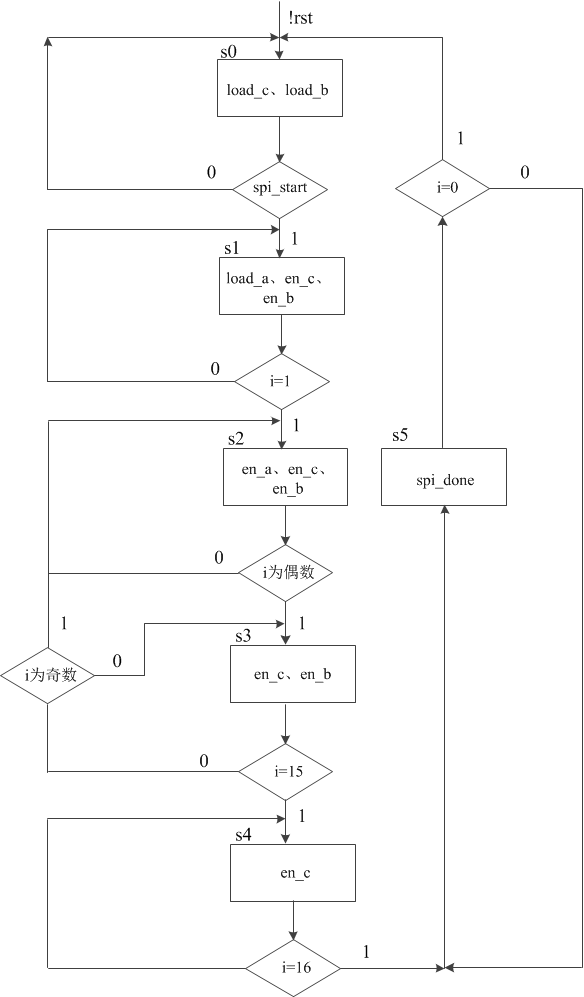
图7中给出了各个状态哪些控制信号应该有效,参照图5图6图7可以理清spi整个发送数据的过程。
四、 verilog描述
接下来使用verilog来描述图6所示的电路,控制信号可根据图7进行描述。
spi发送模块(该模块主要描述控制信号):
module SPI_SEND(input clk_50m,
input rst_n,
input spi_start,
input[7:0] spi_data,
output reg spi_done,
output sck,
output reg cs,
output mosi
);
reg load_c;
reg en_c;
reg load_a;
reg en_a;
reg load_b;
reg en_b;
wire [4:0]i;
parameter [4:0] s0 = 'b000001;
parameter [4:0] s1 = 'b000010;
parameter [4:0] s2 = 'b000100;
parameter [4:0] s3 = 'b001000;
parameter [4:0] s4 = 'b010000;
parameter [4:0] s5 = 'b100000;
reg [5:0]current_state = 'd0;
reg [5:0]next_state = 'd0;
always @(posedge clk_50m or negedge rst_n)
if(!rst_n)
current_state <= s0;
else
current_state <= next_state;
always @(*)
case(current_state)
s0: begin
if(spi_start)
next_state = s1;
else
next_state = s0;
end
s1: begin/该状态加载待发送的数据
if(i == 'd1)
next_state = s2;
else
next_state = s1;
end
s2: begin1,3,5,7,9,11,13,15
if(i[0] == 1'b0)//
next_state = s3;
else
next_state = s2;
end
s3: begin2,4,6,8,10,12,14,16
if(i == 'd15)
next_state = s4;
else if(i[0] == 'd1)
next_state = s2;
else
next_state = s3;
end
s4: begin
if(i == 'd16)
next_state = s5;
else
next_state = s4;
end
s5: begin
if(i == 'd0)
next_state = s0;
else
next_state = s5;
end
default: next_state = s0;
endcase
always @(*)
case(current_state)
s0: begin///空闲状态
load_c = 'd1;
en_c = 'd0;
load_a = 'd0;
en_a = 'd0;
load_b = 'd1;
en_b = 'd0;
spi_done = 'd0;
cs = 'd1;
end
s1: begin加载待发送数据状态
load_c = 'd0;
en_c = 'd1;
load_a = 'd1;
en_a = 'd0;
load_b = 'd0;
en_b = 'd1;
spi_done = 'd0;
cs = 'd0;
end
s2: begin 第一个时钟沿发送数据
load_c = 'd0;
en_c = 'd1;
load_a = 'd0;
en_a = 'd1;
load_b = 'd0;
en_b = 'd1;
spi_done = 'd0;
cs = 'd0;
end
s3: begin第二个时钟沿采样数据
load_c = 'd0;
en_c = 'd1;
load_a = 'd0;
en_a = 'd0;
load_b = 'd0;
en_b = 'd1;
spi_done = 'd0;
cs = 'd0;
end
s4: begin数据发送完毕
load_c = 'd0;
en_c = 'd1;
load_a = 'd0;
en_a = 'd0;
load_b = 'd0;
en_b = 'd0;
spi_done = 'd0;
cs = 'd0;
end
s5: begin
load_c = 'd0;
en_c = 'd0;
load_a = 'd0;
en_a = 'd0;
load_b = 'd0;
en_b = 'd0;
spi_done = 'd1;
cs = 'd1;
end
default: begin
load_c = 'd1;
en_c = 'd0;
load_a = 'd0;
en_a = 'd0;
load_b = 'd1;
en_b = 'd0;
spi_done = 'd0;
cs = 'd1;
end
endcase
// Instantiate the module
count_num count_num (
.clk_50m(clk_50m),
.load_c(load_c),
.en_c(en_c),
.count(i)
);
// Instantiate the module
left_shifter left_shifter (
.clk_50m(clk_50m),
.load_a(load_a),
.en_a(en_a),
.spi_data_in(spi_data),
.mosi(mosi)
);
// Instantiate the module
sck_generate sck_generate (
.clk_50m(clk_50m),
.load_b(load_b),
.en_b(en_b),
.sck(sck)
);
endmodule
计数器电路描述:
module count_num(input clk_50m,
input load_c,
input en_c,
output reg[4:0]count
);
always @(posedge clk_50m)
if(load_c)
count <= 'd0;
else if(en_c) begin
if(count == 'd16)
count <= 'd0;
else
count <= count + 'd1;
end
else
count <= count;
endmodule
移位寄存器电路描述:
module left_shifter(input clk_50m,
input load_a,
input en_a,
input [7:0]spi_data_in,
output mosi
);
reg [7:0]data_reg;
always @(posedge clk_50m)
if(load_a)
data_reg <= spi_data_in;
else if(en_a)
data_reg <= {data_reg[6:0],1'b0};
else
data_reg <= data_reg;
assign mosi = data_reg[7];
endmodule
触发器电路描述:
//SPI3模式下工作,SCK空闲时为高电平
//
module sck_generate(input clk_50m,
input load_b,
input en_b,
output reg sck
);
always @(posedge clk_50m)
if(load_b)
sck <= 'd1;
else if(en_b)
sck <= ~sck;
else
sck <= 'd1;
endmodule仿真激励文件:
module test;
// Inputs
reg clk_50m;
reg rst_n;
reg spi_start;
reg [7:0]spi_data;
// Outputs
wire spi_done;
wire sck;
wire cs;
wire mosi;
// Instantiate the Unit Under Test (UUT)
SPI_SEND uut (
.clk_50m(clk_50m),
.rst_n(rst_n),
.spi_start(spi_start),
.spi_done(spi_done),
.sck(sck),
.cs(cs),
.spi_data(spi_data),
.mosi(mosi)
);
initial begin
// Initialize Inputs
clk_50m = 0;
rst_n = 0;
spi_start = 0;
spi_data = 'd0;
// Wait 100 ns for global reset to finish
#100;
// Add stimulus here
end
always #5 clk_50m = ~clk_50m;
reg [4:0] count = 'd0;
always @(posedge clk_50m)
if(count == 'd20)
count <= 'd20;
else
count <= count + 'd1;
always @(posedge clk_50m)
if(count <= 'd10)
rst_n <= 'd0;
else
rst_n <= 'd1;
reg [9:0]cnt = 'd0;
always @(posedge clk_50m)
if(spi_done)
cnt <= 'd0;
else if(cnt == 'd500)
cnt <= 'd500;
else
cnt <= cnt + 'd1;
always @(posedge clk_50m)
if(cnt=='d499) begin
spi_start <= 'd1;
spi_data <= 'b10101010;
end
else begin
spi_start <= 'd0;
spi_data <= spi_data;
end
endmodule
使用ISIM仿真结果:

图8中待发送的数据spi_data[7:0]=10101010,由于使用的是SPI3模式(CPOL=1,CPHA=1),此模式下SCK空闲时为1,在SCK第一个时钟沿进行数据发送(即图中SCK下降沿进行数据发送),从图中波形可以看出 ,在cs为低时,mosi被一位一位的送出(高位先输出)。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/181785.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
