大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
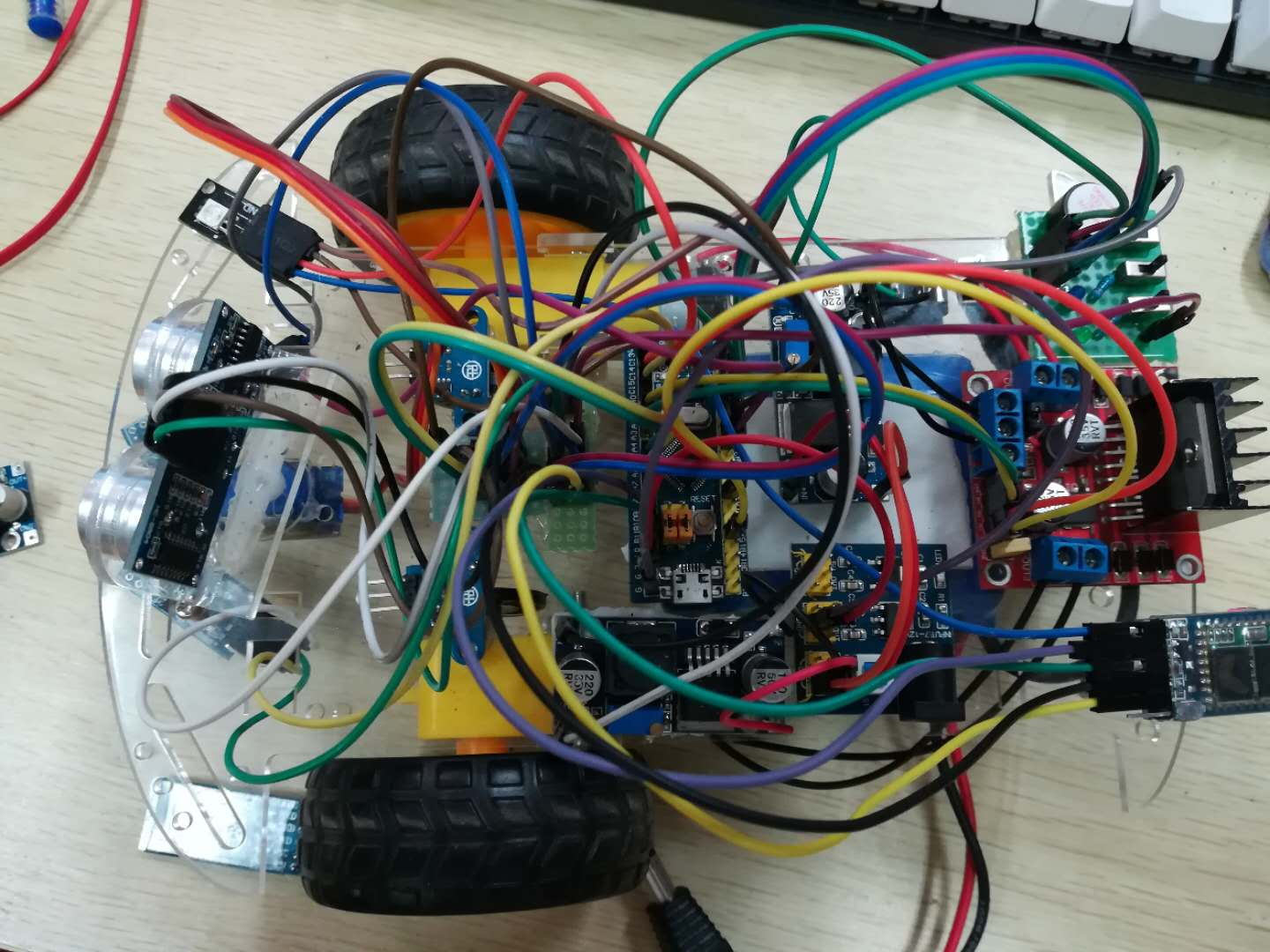
接下来我对所用的模块以及小车的硬件部分做一个讲解
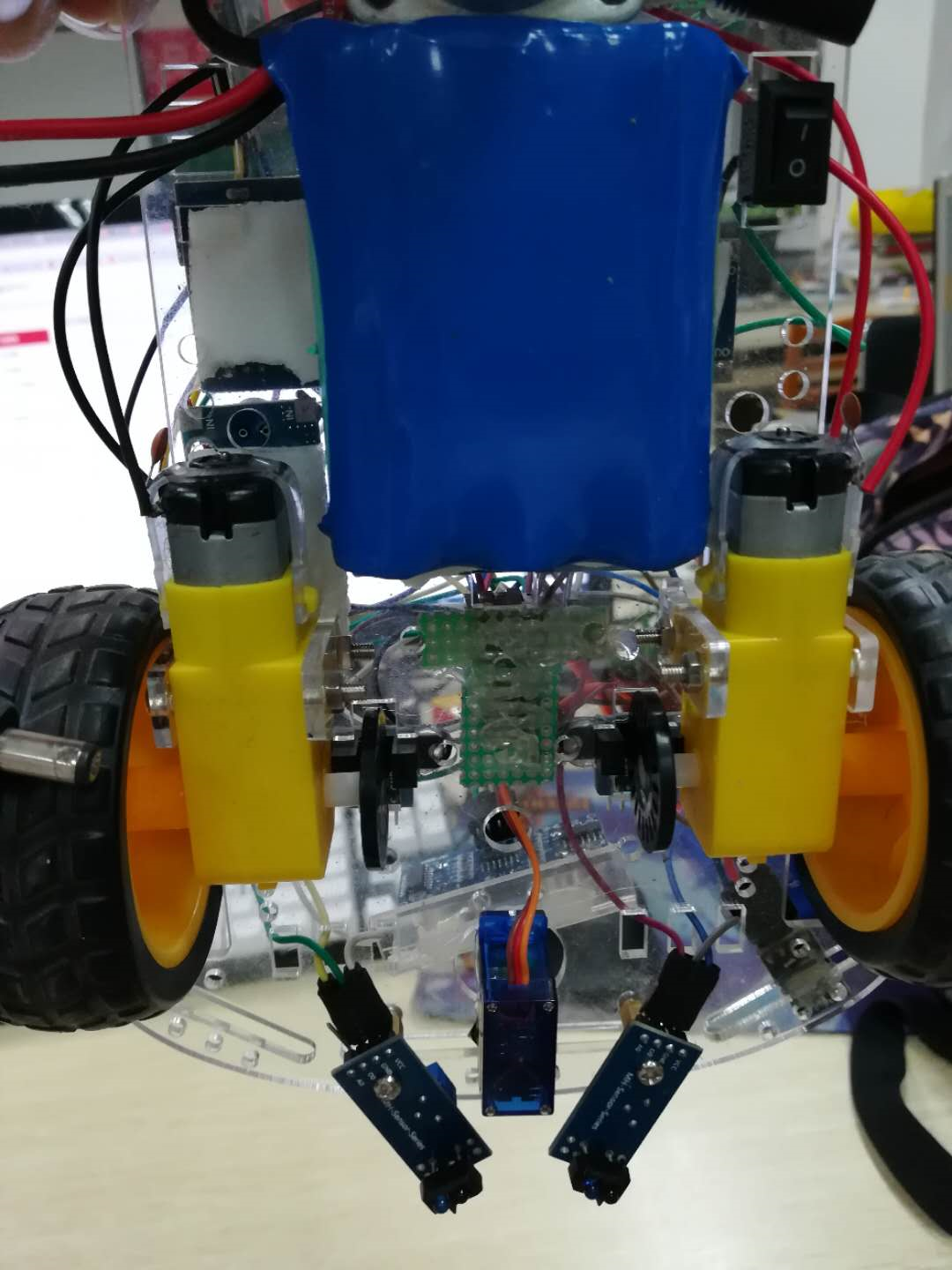
小车的总体效果图如下:

首先是模块简介:
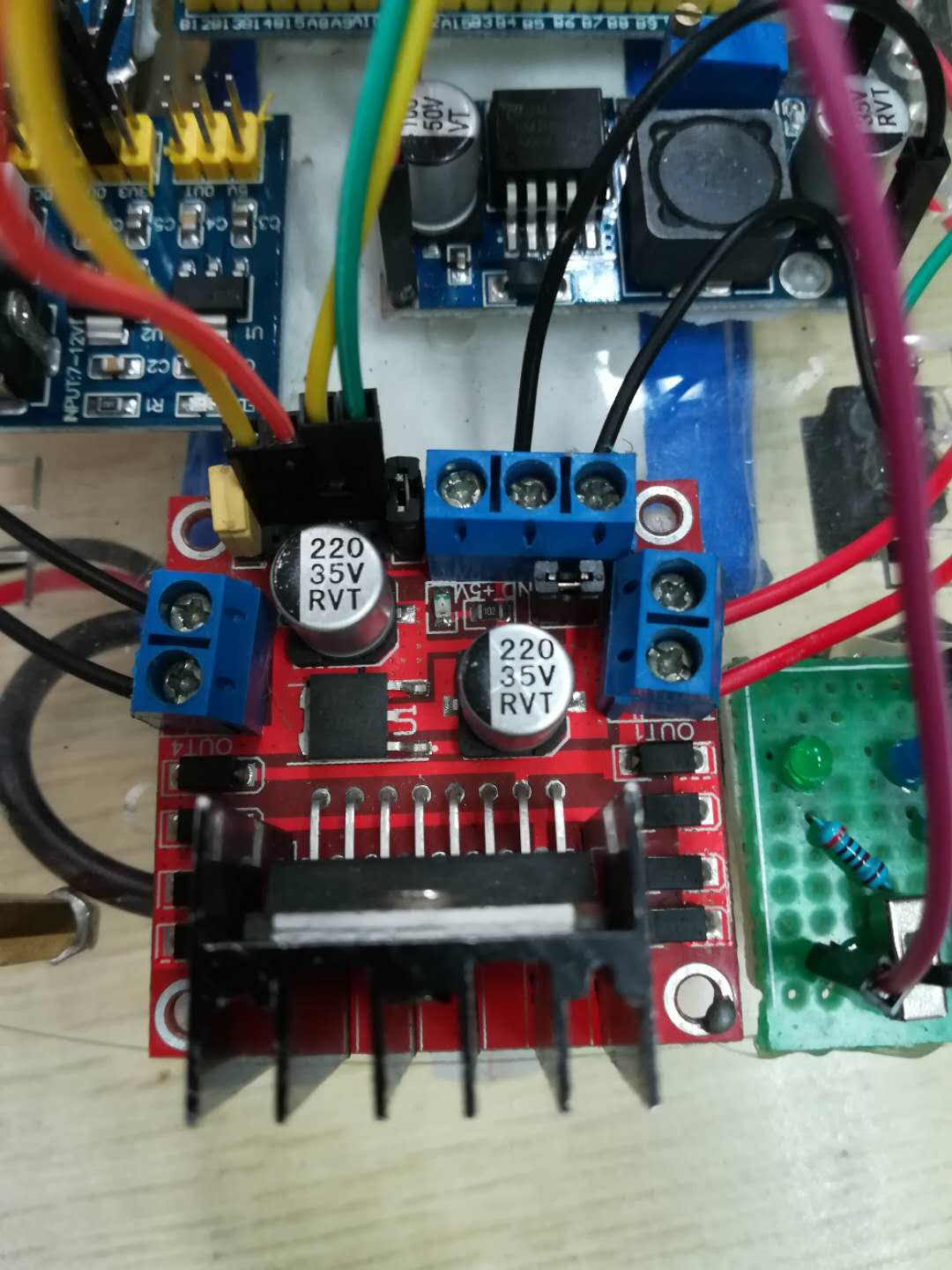
1、首先就是L298N,这是一个经典的电机驱动,相信基本所有玩过单片机,玩过电机的人都使用过,它可以最高容忍15v电压输入,逻辑电平2.4-5.5v,所以使用单片机的3.3v完全可以驱动,它并没有PWM接口来控制电机的速度,只能使逻辑电平输出PWM控制通断频率来调节电机的转速,最低驱动电压的话这个没有具体测量,但是6v以上是完全没有问题的。当然,L298N也是有不少的缺点的,比如速度控制的精度差,响应较慢,发热严重,在做电赛的时候使用TB6612驱动,使用效果就更棒了,以后会在大部分的场合使用后者。
L298N:
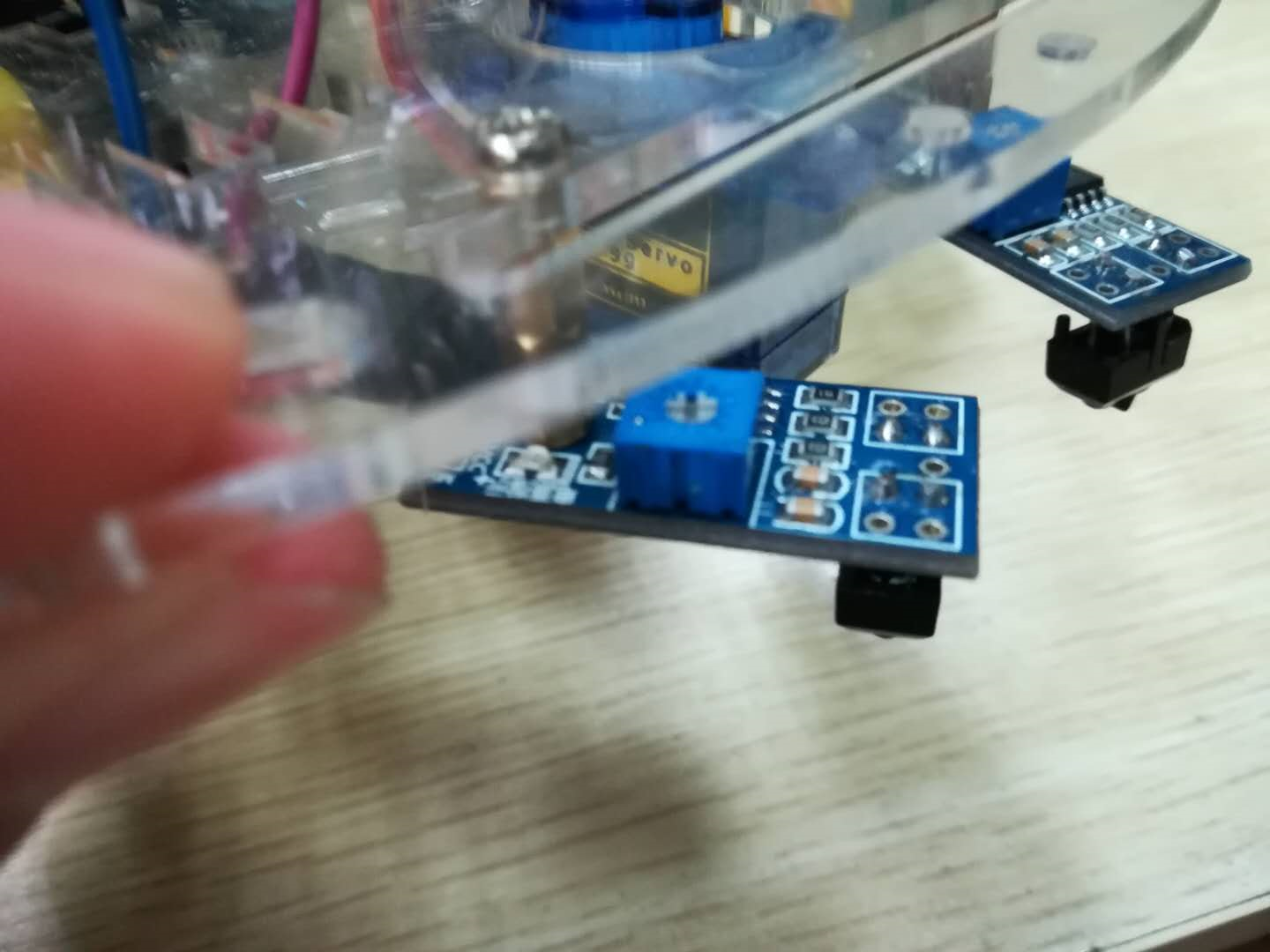
2、红外对管没什么说的,红外可以被反射时低电平,被吸收或距离过远时高电平,上升沿中断就能搞定巡线。
红外对管
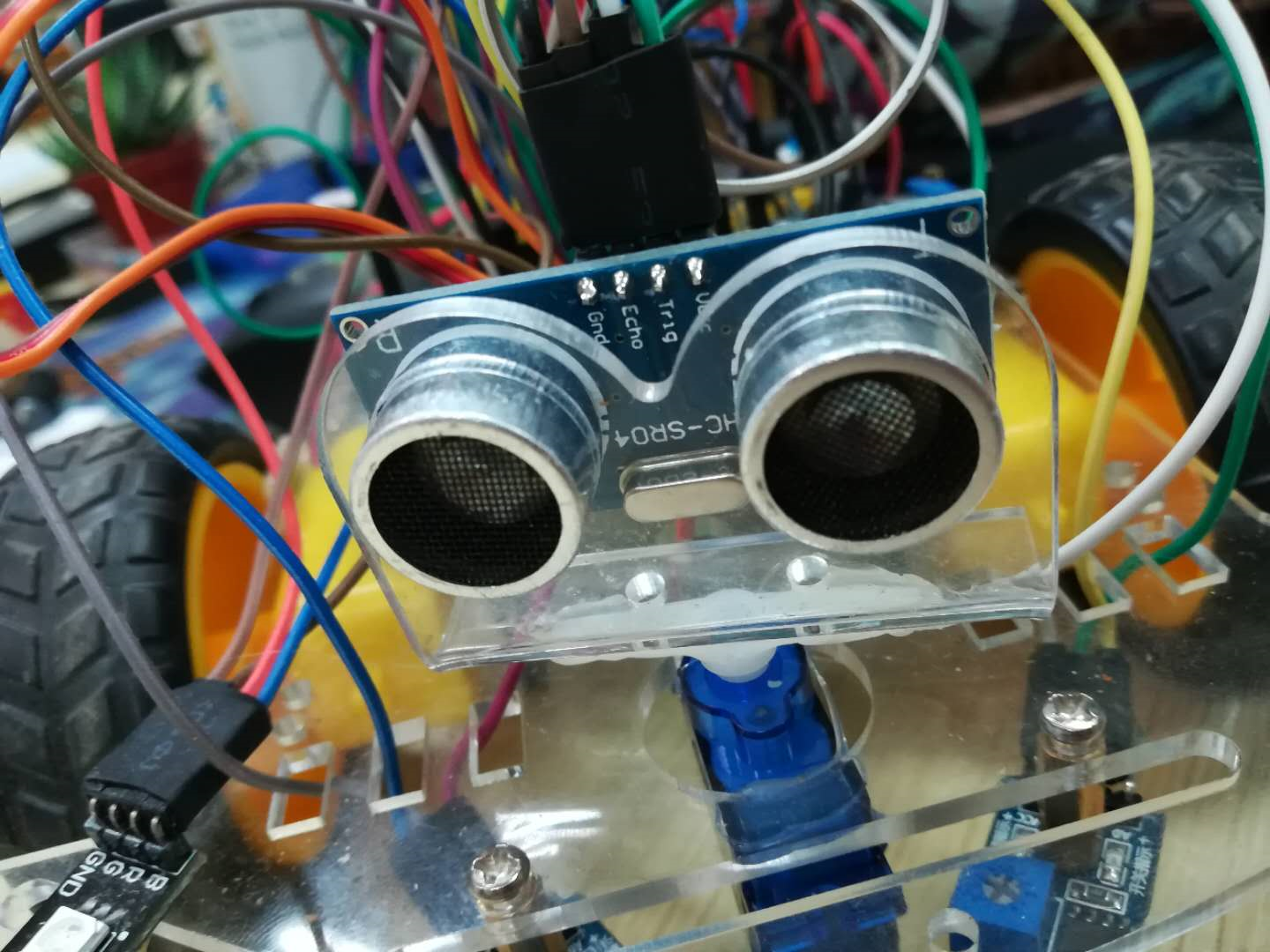
3、HC-SR04,这是一个便宜好用的超声波测距模块,配置简单,但是也有些缺点,首先不能测太小的物体,手掌在50cm左右时测距的效果就不太好了,然后测距的距离不能太远,要不测量时间长不说,精度也不高,最远最好不要超过1m,70cm以内就可以了,然后还有个比较坑的一点,在突然改变与被测物体的距离时,测量值可能突变成无穷。。所以最好加一个软件滤波,均值或者中位数滤波,使距离的测量值更接近真实值。
HC-SR04:
4、电源模块,我使用的是一个可以把12v转成5v 3.3v 也可以12v输出,这个模块还是很好用的,但是!!有一个很重要的缺点,实在是太娇贵了,一旦接错或者短路,电压转换芯片直接就烧了,我一个人烧了俩个半。。。这也是给自己鸣了一个警钟,以后在接线以及使用模块的时候一定要小心,毕竟这模块才4元左右,芯片也就几毛钱,但是以后几千的板子烧了后果一定很惨烈。。
电源模块:
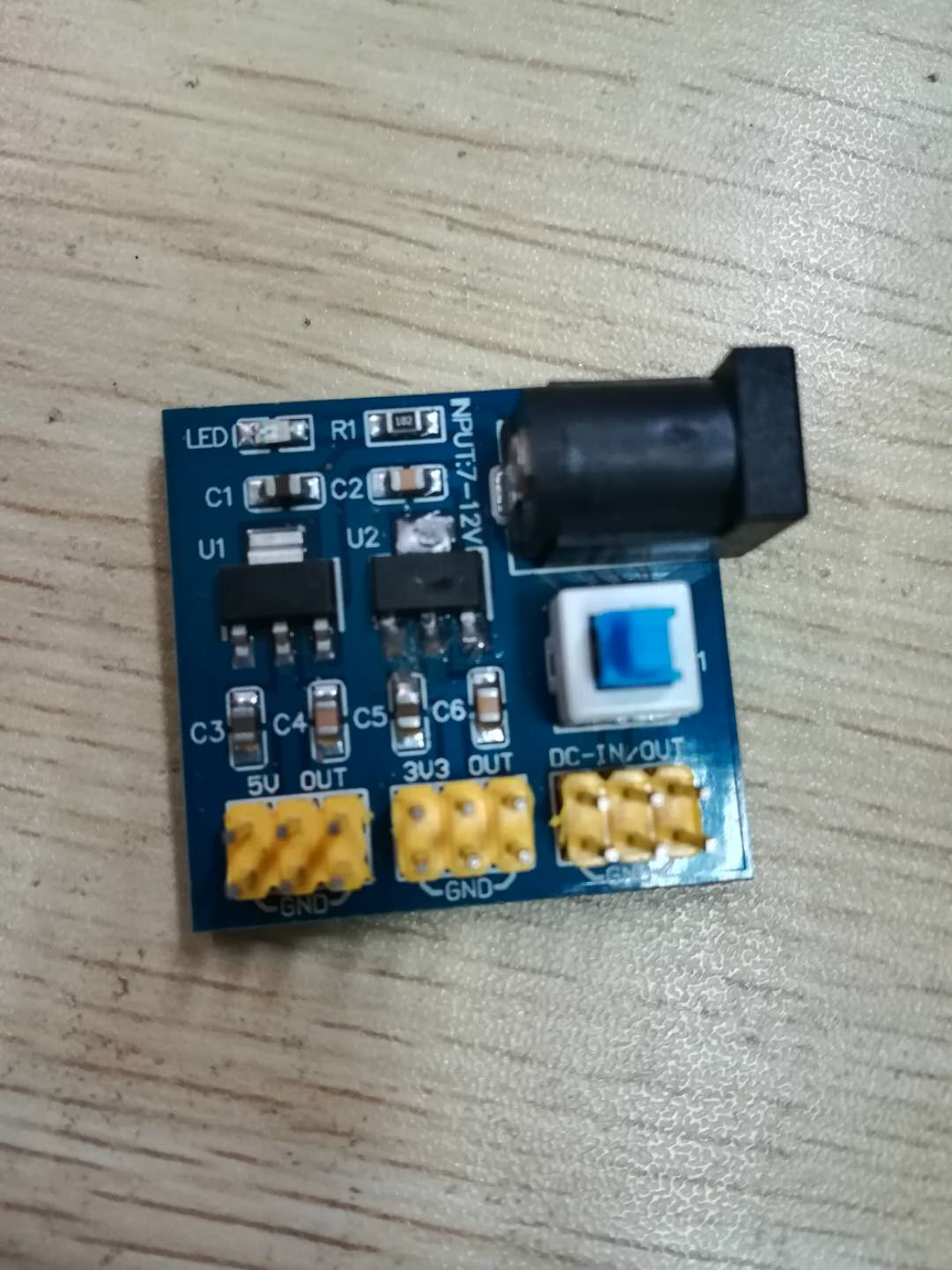
(这个是已经烧坏的,然后换芯片也没修好)
5、直流减速电机(TT电机),最最便宜的电机,买车模送的,我在电机接线的地方焊了一个104电容用作去耦,防止电机产生的电流烧坏板子。电机控制的话接入L298N,用PWM控制即可。
电机:
104电容:

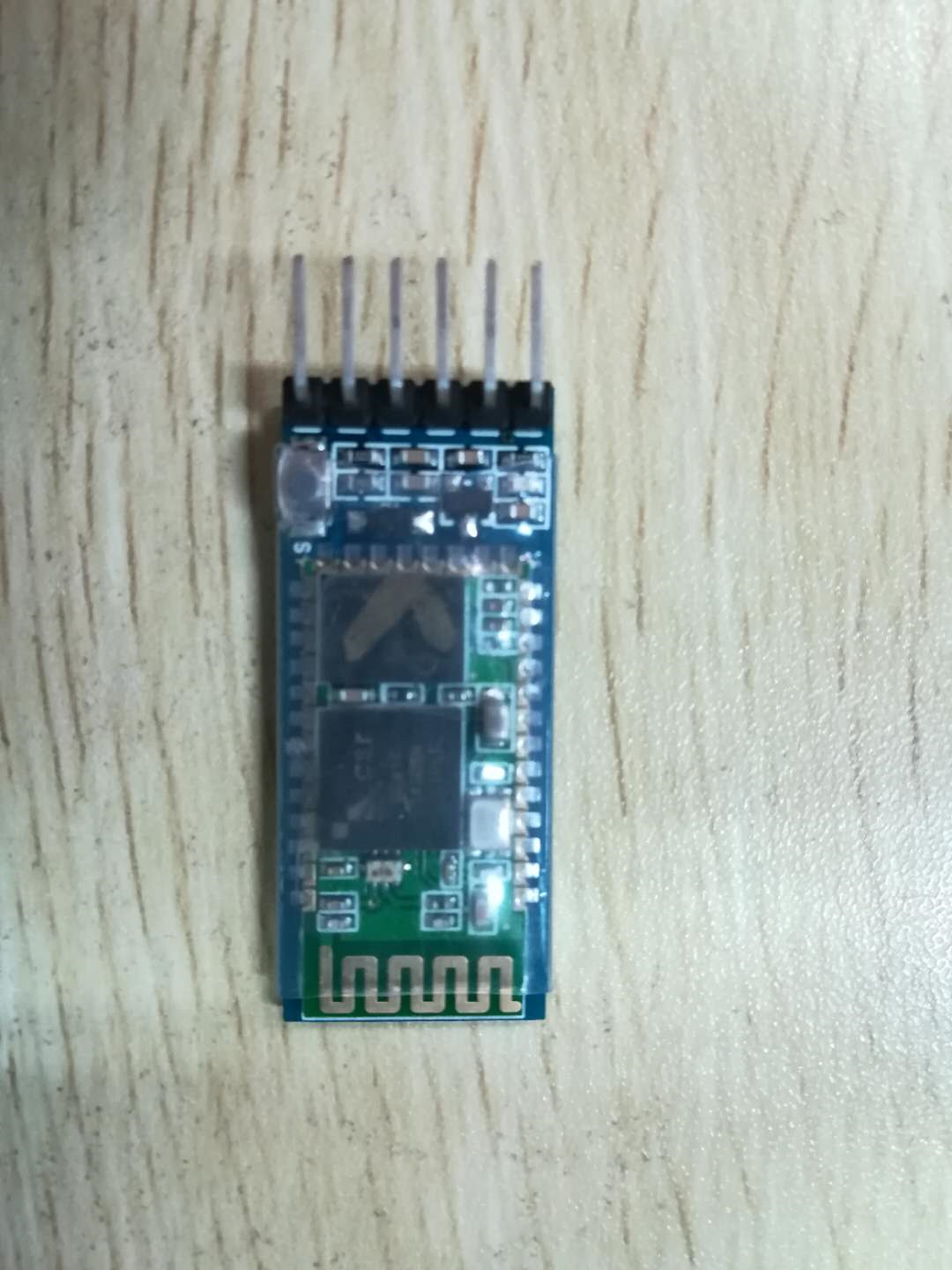
6、HC-05蓝牙模块,一个很好用的蓝牙透传模块,蓝牙和串口连接,不用去管蓝牙协议,还是很好用的,但是我也遇到了一些些问题,在软件设计中会提到。
HC-05:

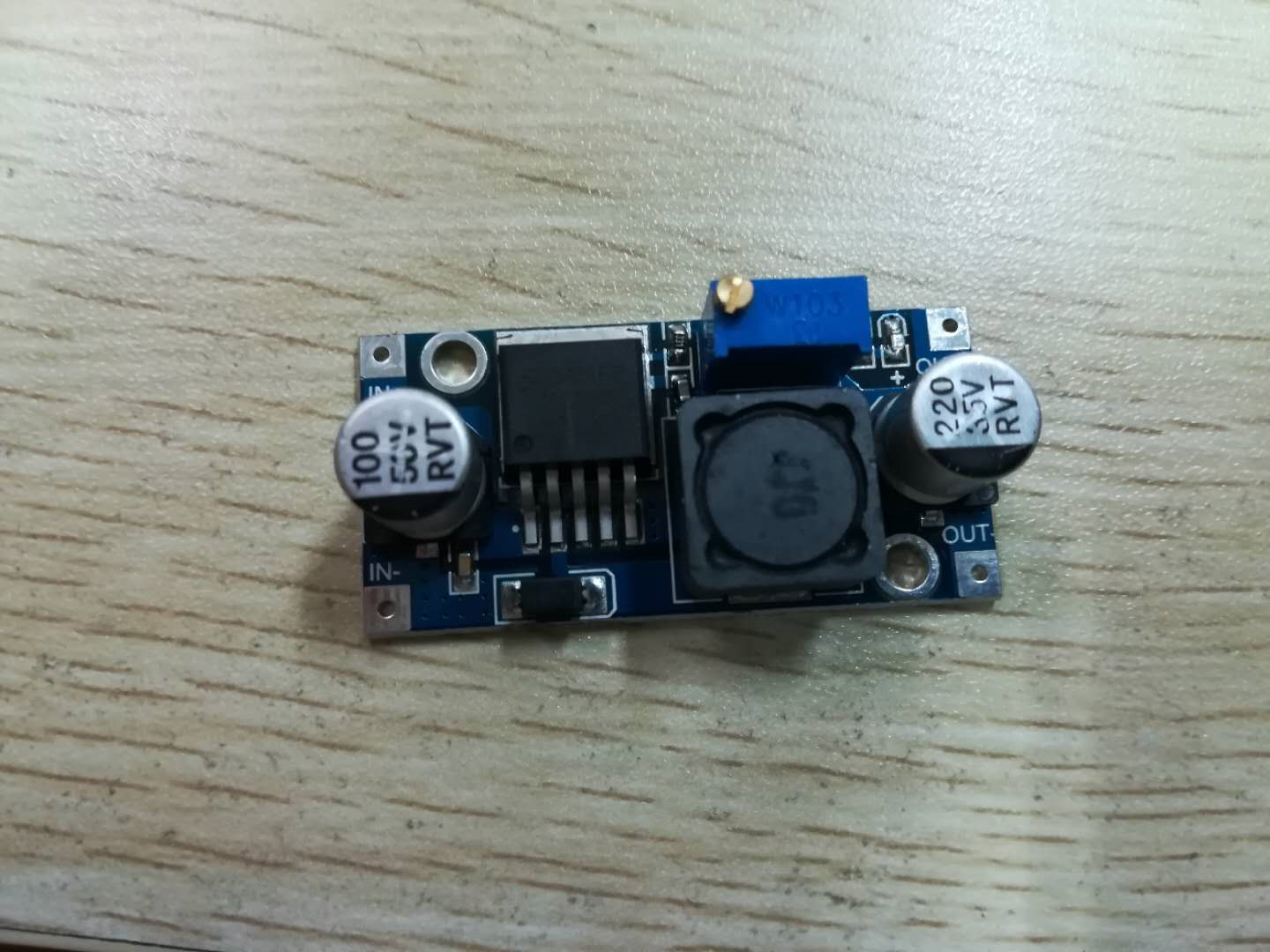
7、LM2596是一个稳压模块,可以用作降压,允许输入最大电压24v,调节可调电阻就可调节输出电压。
LM2596:
8、SG90微型舵机,最小最便宜的塑料舵机,控制的话可以使用PWM也可以用循环+延时反转电平,一开始我用的是PWM,后来因为c8t6的定时器实在有些少,不够给他用。。。换成了循环的方式控制,效果也挺好的,响应也蛮快的。
SG90:

9、单片机我使用的是STM32C8T6的核心板,一个特别小的板子,功能强大,价格也便宜,说到价格我就想说说电子大楼的黑心商人,居然把这小板子卖到了30,最后讲价25拿下,网上15以下就可以拿下,能网上买以后还是尽量走淘宝吧以后。。。虽然实验室给报效也是蛮肉疼的。。
核心板的引脚图:

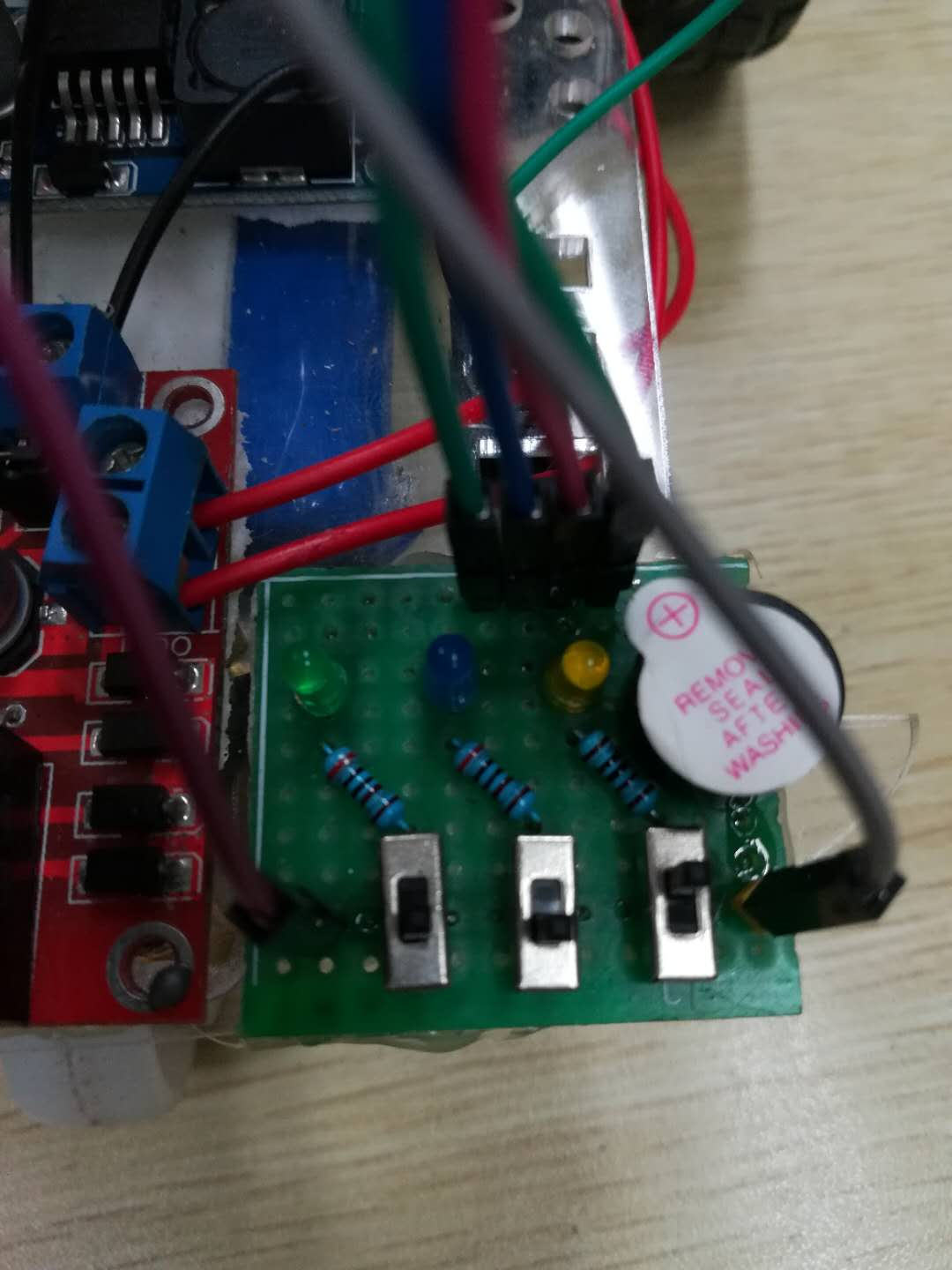
我还为小车焊了一个开关模块,三个拨动开关,三个LED,一个蜂鸣器,三个开关用来做模式的选择,开关打开后LED点亮,蜂鸣器短鸣俩声,然后小车开始工作。
开关模块如下:
其次还焊了一个舵机的接线板,以及5v电源的接线板,这俩个很简单只是用了几个引脚而已,图片如下。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/180977.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
