大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
其实前几周就已经将小车调好并且也发了视频,但是每天忙于复习,也没有时间来对小车的流程设计、硬件设计、程序编写进行一个总结,正好周五可以休息一下,就分三个模块对这个智能小车项目进行一个总结。
这个小项目完全是我一个人搞得,因为组内的小伙伴们都还没学32,他们使用arduino搭的小车,但是毕竟实现的功能还是很简单的,也只是做了一周不到的时间。
首先是小车的流程设计,文老师总是教导,每做一个项目,一开始要写需求文档、画流程图,项目中要写开发文档,项目完成后要写总结。因为这次的项目是一个人搞的,所以说开发文档在制作过程中并没有写。
需求以及所用的模块如下
功能要求:
1、 走直线
2、 寻线(S弯)
3、 避障碍
4、 蓝牙控制
模块清单:
电机驱动L298N
红外对管 *2
超声波测距 HC-SR04
电源模块 12->3.3 / 5 / 12
减速直流电机(6V)
蓝牙模块 HC-05
LM2596 DC-DC稳压模块
SG90 9克微型舵机
//码盘测速模块
单片机: stm32f103c8t6
具体的模块讲解以及使用心得会在后面的硬件设计博客中记录。
接下来是流程图
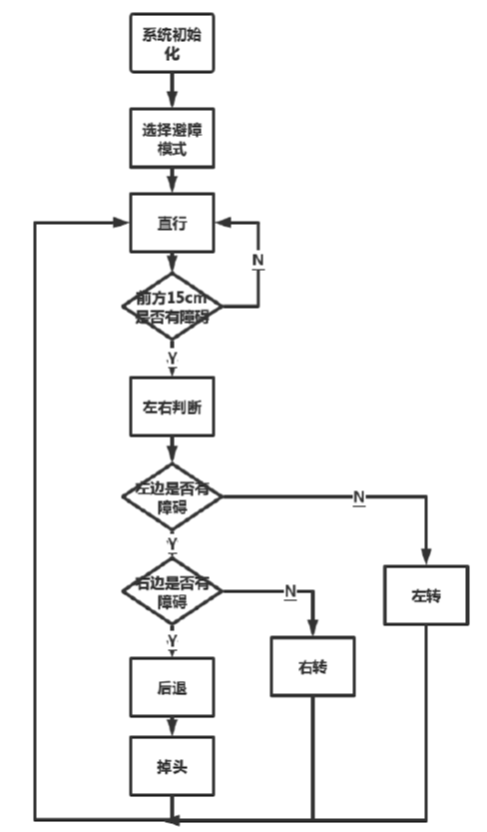
1、避障碍

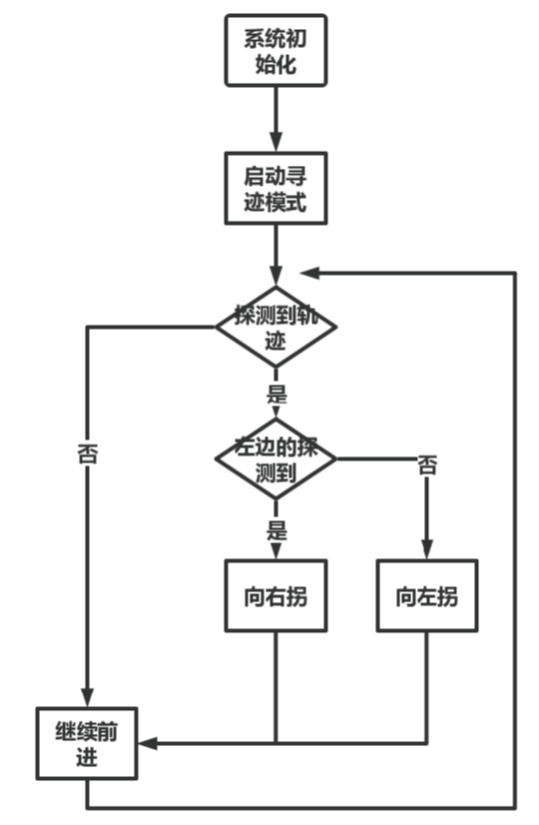
2、巡线
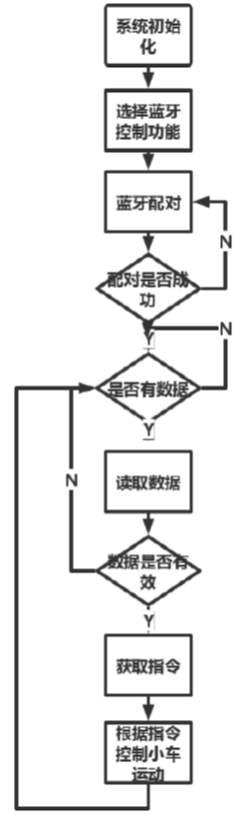
3、蓝牙控制
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/180752.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
