大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
简介
智能循迹小车是基于自动引导机器人系统,用以实现小车自动识别路线,以及选择正确的路线。智能循迹小车是一个运用传感器、单片机、电机驱动及自动控制等技术来实现按照预先设定的模式下,不受人为管理时能够自动实现循迹导航的高新科技。
方案论证
系统总体方案
一、小车控制系统的结构框图


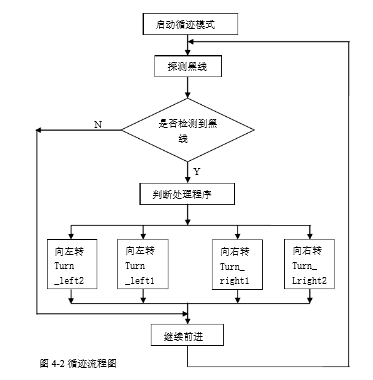
二、程序流程框图
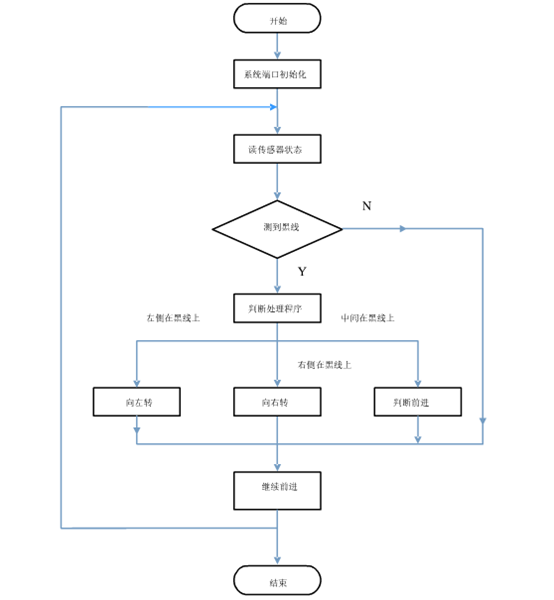
三、循迹原理的简单描述
循迹是指小车在白色地板上,循黑线行走通常采取的方法是红外探测法,红外探测法即利用红外线光遇到白色物体表面具有不同的反射性质的特点,在小车行驶过程中不断地向地面发射红外光,当红外光遇到白色纸质地板时发生漫反射,反射光被装在小车上的接收管接收,如果遇到黑线,则红外光被吸收小车上的接收管接收不到红外光,单片机就是是否收到反射回来的红外光为依据来确定黑线的位置和小车的行走路线,从而实现小车的循迹功能。红外探测器探测距离有限,一般不超过三厘米。
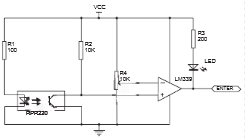
循迹电路制作
原理图如下图,元件清单如下:①四个RPR220
②100Ω、2K、10K 电阻各四个③四个10K 滑动变阻器④LM339芯片
四、具体功能实现方案框图

五、详细的系统方案
智能小车采用STC89C51单片机集中控制和分散模块化设计。智能小车硬件有STC89C51单片机、红外传感器循迹模块、轨迹检测模块。智能小车的机械结构设计:为了保证小车能够进行循迹,同时避免外界的光对他产生的干扰,将道路检测电路板放在小车地盘,红外传感器循迹模块放在小车左前端,超声波避障模块放在右前端,单片机控制板放在小车正上方,从而保持小车的平衡性,直流电机、电源模块放在车中间,尽量在一条竖线上使小车电源方便控制,以及小车转弯时惯量减小,增强其稳定性。
硬件设计:
- 控制器
采用STC89C51单片机。STC89C51单片机是低功耗、廉价、稳定性能优良的对所有兼容Intel 8031指令系统的单片机。
- 电动机驱动模块
L293N可直接的对电机进行控制,无须隔离电路。通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的运作,非常方便,亦能满足直流减速电机的大电流要求。调试时对应代码表,用程序输入对应的码值,能够实现对应的动作,调试通过。
三、循迹模块
采用RPR循迹模块用于反射性光电探测器。
软件设计:
- 传感器检测程序
HC-SR04超声波模块将检测到搭的信息输入到STC89C51微控制器中进行AD转化得到电压值进行智能判断。
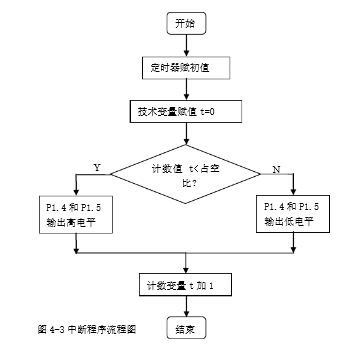
- 电机驱动程序
利用PWM输出,改变PWM波的占空比控制直流电机。PWM是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在测量、通信到功率控制与变换的许多领域中。PWM的一个优点是从处理器到被控制系统信号都是数字形式的,无需进行数模转换,让信号保持位数字信号可将噪声影响降到最小。STC89C51中有两个16位的定时器,每个定时器都具备四路通道,其中每一个通道都能产生PWM输出对左右两个电机的速度进行控制。
- 速度检测程序
利用STC89C51中的定时器输入捕获功能来对速度脉冲信号进行处理,从而计算出小车的行驶速度。
- 串口通信程序
小车硬件平台预留一个串口通信接口,通过STC89C51的串口可以方便地与其他串行接口设备进行无线通信和数据传输。
- 超声波避障模块
将小车红外传感器循迹模块和超声波结合起来,通过软件编程,可使智能小车实现以下功能:当超声波检测到障碍物时,小车停止行进;当超声波没有检测到障碍物时,小车按照红外传感器循迹模块检测到的轨迹行进。
六、改进方案或扩展
硬件设计:
一、控制器
方案一、采用AT89S52单片机,AT89S52单片机是一种低功耗、高性能COMS8位控制器,具有8K在系统可编程存储器。使用Atmel公司高密度非易失性存储器技术制造,与工业80C51产品指令和引脚完全兼容。片上Flash允许陈旭存储器在系统可编程,亦适于常规编程器。AT89S52有5个中断源和3个定时计数器。
方案二、采用51单片机。51单片机是低功耗、廉价、稳定性能优良的对所有兼容Intel 8031指令系统的单片机。他的功能有
·8位CPU·4kbytes程序存储器(ROM) (52为8K)
·128bytes的数据存储器(RAM) (52有256bytes的RAM)
·32条I/O口线·111条指令,大部分为单字节指令
·21个专用寄存器
·2个可编程定时/计数器·5个中断源,2个优先级(52有6个)
·一个全双工串行通信口
·外部数据存储器寻址空间为64kB
·外部程序存储器寻址空间为64kB
而且51单片机体积非常细小,非常方便插入到用户板中.插入时紧贴用户板,没有连接电缆,这样可以有效地减少运行中的干扰,避免仿真时出现莫名其妙的故障;仿真插针采用优质镀金插针,可以有效地防止日久生锈,选择优质园脚IC插座,保护仿真插针,同时不会损坏目标板上的插座. ;仿真时监控和用户代码分离,不可能产生不能仿真的软故障;RS-232接口不计成本采用MAX202集成电路,串行通讯稳定可靠,绝非一般三极管的简易电路可比。
二、电动机驱动模块
L293N可直接的对电机进行控制,无须隔离电路。通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的运作,非常方便,亦能满足直流减速电机的大电流要求。调试时对应代码表,用程序输入对应的码值,能够实现对应的动作,调试通过。
三、循迹模块
方案一:采用光敏元件。该方案缺点易受外界光源的干扰,有时甚至检测不到黑线,主要是因为可见光的反射效果、跟地表的平坦程度地表材料的反射情况均对检测结果产生直接影响。克服此缺点的方法是采用超高亮度的发光二极管能降低一定的干扰,但这又会增加检测系统的功耗
方案二:克服此缺点的方法是采用超高亮度的发光二极管能降低一定的干扰,但这又会增加检测系统的功耗
方案三:RPR循迹模块用于反射性光电探测器。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/180682.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
