大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
此次完成的任务是要使能高通8953平台的i2c和spi,主要做的工作就是在设备树文件中添加节点信息。主要的工作在于对设备树文件的修改,主要修改了msm8953-pinctrl.dtsi和msm8953.dtsi两个文件。
msm8953-pinctrl.dtsi是配置MSM8953芯片中的GPIO。在此文件中定义i2c使用哪个gpio。
因为引脚复用功能的存在,所以要先配置i2c的引脚复用功能,在msm8953-pinctrl.dtsi中进行如下配置:
i2c_4 {
i2c_4_active: i2c_4_active { /*i2c处于active状态*/
/* active state */
mux {
pins = “gpio14”, “gpio15”; /*i2c有两根线,分别是SDA和SCL*/
/* SDA用到了gpio14,SCL用到了gpio15*/
function = “blsp_i2c4”; /*这个gpio组支持功能复用,在i2c_4_active中,gpio说明采用”blsp_i2c4″功能*/
};
config {
pins = “gpio14”, “gpio15”;
drive-strength = <2>; /*设置gpio14,gpio15这个pin脚组的驱动能力为2MA*/
bias-disable; /*选项有bias-pull-up、bias-pull-down和bias-disable。这里使用bias-disable,代表no-pull*/
};
};
i2c_4_sleep: i2c_4_sleep { /*i2c处于sleep状态*/
/* suspended state */
mux {
pins = “gpio14”, “gpio15”;
function = “gpio”; /*这时pins的功能设置为普通的gpio功能。这里体现出了pin脚的功能复用。*/
};
config {
pins = “gpio14”, “gpio15”;
drive-strength = <2>; /*驱动能力设置为2MA*/
bias-disable;
};
};
};
接下来,需要在文件msm8953.dtsi中添加一个新的i2c设备树节点:
根据spec获取物理地址,中断号等。
i2c_4: i2c@78b8000 { /* BLSP1 QUP4 */ /*i2c_4使用的是BLSP1 QUP4,对应的物理地址为0x78b8000*/
compatible = “qcom,i2c-msm-v2”;
#address-cells = <1>;
#size-cells = <0>;
reg-names = “qup_phys_addr”;
reg = <0x78b8000 0x600>; /*i2c_4对应的物理地址*/
interrupt-names = “qup_irq”;
interrupts = <0 98 0>; /*根据spec可以得到BLSP1 QUP4对应的中断号为98,第三个0的含义为:*/
/*1: low-to-high edge triggered;2: high-to-low edge triggered;3: active high-level-sensitive;4: active low-level-sensitive*/
qcom,clk-freq-out = <400000>; /*希望得到的i2c总线时钟频率,HZ*/
qcom,clk-freq-in = <19200000>; /*提供的核心时钟频率,HZ*/
clock-names = “iface_clk”, “core_clk”;
clocks = <&clock_gcc clk_gcc_blsp1_ahb_clk>,
<&clock_gcc clk_gcc_blsp1_qup4_i2c_apps_clk>;
pinctrl-names = “i2c_active”, “i2c_sleep”; /*用到的pinctrl。*/
pinctrl-0 = <&i2c_4_active>;
pinctrl-1 = <&i2c_4_sleep>;
qcom,noise-rjct-scl = <0>;
qcom,noise-rjct-sda = <0>;
qcom,master-id = <86>;
dmas = <&dma_blsp1 10 64 0x20000020 0x20>,
<&dma_blsp1 11 32 0x20000020 0x20>;
dma-names = “tx”, “rx”;
status = “okay”;
};
确认i2c是否配置成功的方法:
adb shell
cd /dev/
ls i2c*
会看到所添加的i2c设备。
使用示波器可以观察到正确的波形,证明配置正确了。
对spi的配置和i2c类似,主要在msm8953-pinctrl.dtsi和msm8953.dtsi中进行修改:
在msm8953-pinctrl.dtsi中添加如下代码:
spi3 {
spi3_default: spi3_default {
/* active state */
mux {
/* MOSI, MISO, CLK */
pins = “gpio8”, “gpio9”, “gpio11”; /* 在这里,spi使用四根线,MOSI、MISO、CLK和CS。*/
/* MOSI对应gpio8,MISO对应gpio9,CLK对应gpio11,CS对应gpio10*/
/* spi普遍使用三根或四根线,在需要片选时需要加CS线*/
function = “blsp_spi3″; /* 功能复用,设置功能为”blsp_spi3” */
};
config {
pins = “gpio8”, “gpio9”, “gpio11”;
drive-strength = <12>; /* 12 MA */ /*驱动能力为12MA*/
bias-disable = <0>; /* No PULL */ /*有三个选项:bias-disable、bias-pull-down、bias-pull-up*/
};
};
spi3_sleep: spi3_sleep {
/* suspended state */
mux {
/* MOSI, MISO, CLK */
pins = “gpio8”, “gpio9”, “gpio11”;
function = “gpio”; /* 功能复用,在sleep状态时作为gpio。*/
};
config {
pins = “gpio8”, “gpio9”, “gpio11”;
drive-strength = <2>; /* 2 MA */ /* 睡眠状态时的驱动能力设为2MA */
bias-pull-down; /* PULL Down */
};
};
spi3_cs0_active: cs0_active { /*设置CS片选线的gpio*/
/* CS */
mux {
pins = “gpio10”;
function = “blsp_spi3”; /*功能复用*/
};
config {
pins = “gpio10”;
drive-strength = <2>;
bias-disable = <0>;
};
};
spi3_cs0_sleep: cs0_sleep {
/* CS */
mux {
pins = “gpio10”;
function = “gpio”;
};
config {
pins = “gpio10”;
drive-strength = <2>;
bias-disable = <0>;
};
};
};
在msm8953.dtsi中添加节点:
spi_3: spi@78b7000 { /* BLSP1 QUP3 */ /*使用BLSP1 QUP3*/
compatible = “qcom,spi-qup-v2”;
#address-cells = <1>;
#size-cells = <0>;
reg-names = “spi_physical”, “spi_bam_physical”;
reg = <0x78b7000 0x600>,
<0x7884000 0x1f000>;
interrupt-names = “spi_irq”, “spi_bam_irq”;
interrupts = <0 97 0>, <0 238 0>; /*根据表2确定中断号*/
spi-max-frequency = <19200000>; /*最大的SPI设备的频率*/
pinctrl-names = “spi_default”, “spi_sleep”; /*所用到的pin脚和功能*/
pinctrl-0 = <&spi3_default &spi3_cs0_active>;
pinctrl-1 = <&spi3_sleep &spi3_cs0_sleep>;
clocks = <&clock_gcc clk_gcc_blsp1_ahb_clk>,
<&clock_gcc clk_gcc_blsp1_qup3_spi_apps_clk>;
clock-names = “iface_clk”, “core_clk”;
qcom,infinite-mode = <0>;
qcom,use-bam; /*使用BAM模式*/
qcom,use-pinctrl;
qcom,ver-reg-exists;
qcom,bam-consumer-pipe-index = <8>;
qcom,bam-producer-pipe-index = <9>;
qcom,master-id = <86>;
};
如果配置正确,可以在/sys/class/spi_master/spi下看到spi总线:
adb shell
cd /sys/class/spi_master/
ls
spi和i2c知识总结:
SPI总线由三条信号线组成。SPI总线可以实现 多个SPI设备互相连接。提供SPI串行时钟的SPI设备为SPI主机或主设备(Master),其他设备为SPI从机或从设备(Slave)。主从设备 间可以实现全双工通信,当有多个从设备时,还可以增加一条从设备选择线。
如果用通用IO口模拟SPI总线,必须要有一个输出口,一个输入口,另一个口则视实现的设备类型而定,如果要实现主从设备,则需输入输出口,若只实现主设备,则需输出口即可,若只实现从设备,则只需输入口即可。
I2C总线是双向、两线、串行、多主控(multi-master)接口标准,具有总线仲裁机制,非常适合在器件之间进行近距离、非经常性的数据通信。在它的协议体系中,传输数据时都会带上目的设备的设备地址,因此可以实现设备组网。
如果用通用IO口模拟I2C总线,并实现双向传输,则需一个输入输出口,另外还需一个输出口。
iic的两根线:SDA、SCL,结构如下图所示。分别表示:
SDA:串行数据线。
SCl:串行时钟线。

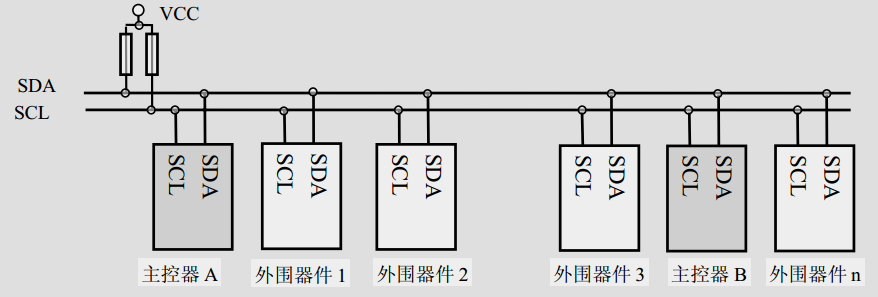
图 IIC结构示意图
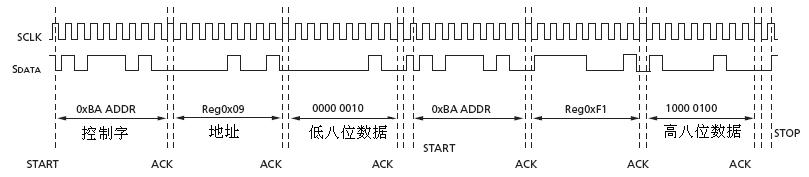
图 IIC总线数据传输协议示意图
spi的四根线:MOSI、MISO、CS、CLK,spi总线的结构和数据的传送格式如下图所示。分别代表:
MOSI:主输出,从输入。
MISO:主输入,从输出。
CS:片选。
CLK:同步时钟。
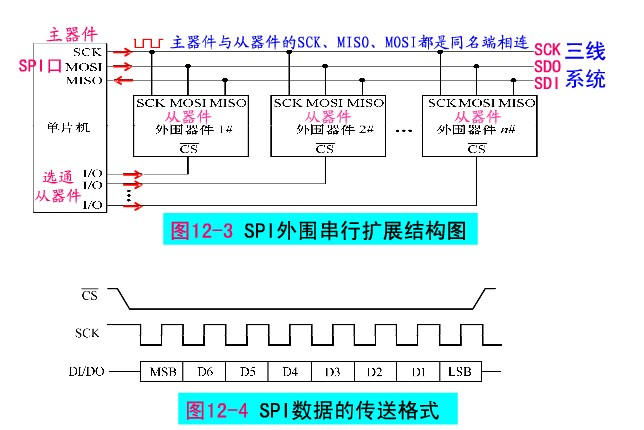
图 spi结构和数据传送格式示意图
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/180599.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
