大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
本系列文章为原创,转载请注明出处。
作者:Dongdong Bai
邮箱: baidongdong@nudt.edu.cn
若您觉得本博文对您有帮助,请您为我点赞并关注我,以鼓励我写出更优秀的博文。谢谢!
Eigen: C++开源矩阵计算工具——Eigen的简单用法
Eigen库是一个开源的C++线性代数库,它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能。Eigen是一个用纯头文件搭建起来的库,这意味这你只要能找到它的头文件,就能使用它。Eigen头文件的默认位置是“/usr/include/eigen3”.
由于Eigen库相较于OpenCV中的Mat等库而言更加高效,许多上层的软件库也使用Eigen进行矩阵运算,比如SLAM中常用的g2o,Sophus等。此外Eigen库还被被用于Caffe,Tensorflow等许多深度学习相关的框架中。
- 刚体运动中的旋转通常可以由旋转矩阵,旋转向量和四元数等多种方式表示(具体的转换公式请参见这篇博客),在Eigen库中也有其对应的实现。本文主要介绍刚体运动时旋转矩阵,旋转向量和四元数的初始化以及相互转换在Eigen中的实现方式。
Eigen库中各种形式的表示如下:
旋转矩阵(3X3):Eigen::Matrix3d
旋转向量(3X1):Eigen::AngleAxisd
四元数(4X1):Eigen::Quaterniond
平移向量(3X1):Eigen::Vector3d
变换矩阵(4X4):Eigen::Isometry3d以下是具体的实现代码eigen_geometry.cpp:
#include <iostream>
#include <Eigen/Dense>
using namespace std;
using namespace Eigen;
int main(int argc, char **argv) {
//下面三个变量作为下面演示的中间变量
AngleAxisd t_V(M_PI / 4, Vector3d(0, 0, 1));
Matrix3d t_R = t_V.matrix();
Quaterniond t_Q(t_V);
//对旋转向量(轴角)赋值的三大种方法
//1.使用旋转的角度和旋转轴向量(此向量为单位向量)来初始化角轴
AngleAxisd V1(M_PI / 4, Vector3d(0, 0, 1));//以(0,0,1)为旋转轴,旋转45度
cout << "Rotation_vector1" << endl << V1.matrix() << endl;
//2.使用旋转矩阵转旋转向量的方式
//2.1 使用旋转向量的fromRotationMatrix()函数来对旋转向量赋值(注意此方法为旋转向量独有,四元数没有)
AngleAxisd V2;
V2.fromRotationMatrix(t_R);
cout << "Rotation_vector2" << endl << V2.matrix() << endl;
//2.2 直接使用旋转矩阵来对旋转向量赋值
AngleAxisd V3;
V3 = t_R;
cout << "Rotation_vector3" << endl << V3.matrix() << endl;
//2.3 使用旋转矩阵来对旋转向量进行初始化
AngleAxisd V4(t_R);
cout << "Rotation_vector4" << endl << V4.matrix() << endl;
//3. 使用四元数来对旋转向量进行赋值
//3.1 直接使用四元数来对旋转向量赋值
AngleAxisd V5;
V5 = t_Q;
cout << "Rotation_vector5" << endl << V5.matrix() << endl;
//3.2 使用四元数来对旋转向量进行初始化
AngleAxisd V6(t_Q);
cout << "Rotation_vector6" << endl << V6.matrix() << endl;
//------------------------------------------------------
//对四元数赋值的三大种方法(注意Eigen库中的四元数前三维是虚部,最后一维是实部)
//1.使用旋转的角度和旋转轴向量(此向量为单位向量)来初始化四元数,即使用q=[cos(A/2),n_x*sin(A/2),n_y*sin(A/2),n_z*sin(A/2)]
Quaterniond Q1(cos((M_PI / 4) / 2), 0 * sin((M_PI / 4) / 2), 0 * sin((M_PI / 4) / 2), 1 * sin((M_PI / 4) / 2));//以(0,0,1)为旋转轴,旋转45度
//第一种输出四元数的方式
cout << "Quaternion1" << endl << Q1.coeffs() << endl;
//第二种输出四元数的方式
cout << Q1.x() << endl << endl;
cout << Q1.y() << endl << endl;
cout << Q1.z() << endl << endl;
cout << Q1.w() << endl << endl;
//2. 使用旋转矩阵转四元數的方式
//2.1 直接使用旋转矩阵来对旋转向量赋值
Quaterniond Q2;
Q2 = t_R;
cout << "Quaternion2" << endl << Q2.coeffs() << endl;
//2.2 使用旋转矩阵来对四元數进行初始化
Quaterniond Q3(t_R);
cout << "Quaternion3" << endl << Q3.coeffs() << endl;
//3. 使用旋转向量对四元数来进行赋值
//3.1 直接使用旋转向量对四元数来赋值
Quaterniond Q4;
Q4 = t_V;
cout << "Quaternion4" << endl << Q4.coeffs() << endl;
//3.2 使用旋转向量来对四元数进行初始化
Quaterniond Q5(t_V);
cout << "Quaternion5" << endl << Q5.coeffs() << endl;
//----------------------------------------------------
//对旋转矩阵赋值的三大种方法
//1.使用旋转矩阵的函数来初始化旋转矩阵
Matrix3d R1=Matrix3d::Identity();
cout << "Rotation_matrix1" << endl << R1 << endl;
//2. 使用旋转向量转旋转矩阵来对旋转矩阵赋值
//2.1 使用旋转向量的成员函数matrix()来对旋转矩阵赋值
Matrix3d R2;
R2 = t_V.matrix();
cout << "Rotation_matrix2" << endl << R2 << endl;
//2.2 使用旋转向量的成员函数toRotationMatrix()来对旋转矩阵赋值
Matrix3d R3;
R3 = t_V.toRotationMatrix();
cout << "Rotation_matrix3" << endl << R3 << endl;
//3. 使用四元数转旋转矩阵来对旋转矩阵赋值
//3.1 使用四元数的成员函数matrix()来对旋转矩阵赋值
Matrix3d R4;
R4 = t_Q.matrix();
cout << "Rotation_matrix4" << endl << R4 << endl;
//3.2 使用四元数的成员函数toRotationMatrix()来对旋转矩阵赋值
Matrix3d R5;
R5 = t_Q.toRotationMatrix();
cout << "Rotation_matrix5" << endl << R5 << endl;
return 0;
}
上述代码对应的CMakeLists.txt为:
CMAKE_MINIMUM_REQUIRED(VERSION 2.8)
project(useGeometry)
include_directories("/usr/include/eigen3")
add_executable(eigen_geometry eigen_geometry.cpp)- 旋转矩阵(R),旋转向量(V)和四元数(Q)在Eigen中转换关系的总结:

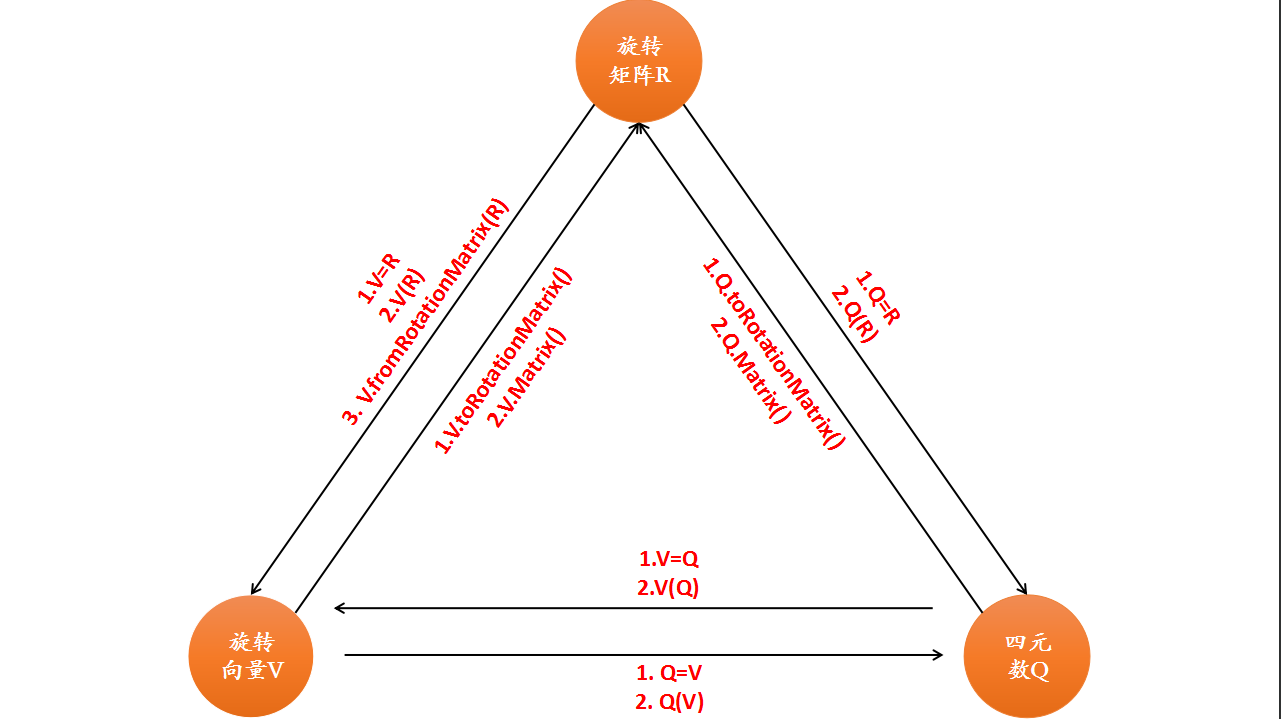
-
旋转矩阵(R),旋转向量(V)和四元数(Q)分别通过自身初始化自己的方式,也就是第一分部分代码对旋转矩阵(R),旋转向量(V)和四元数(Q)赋值的第一种方式。
- R通过自身初始化的方法:
//1.使用旋转矩阵的函数来初始化旋转矩阵
Matrix3d R1=Matrix3d::Identity();
cout << "Rotation_matrix1" << endl << R1 << endl;
- V通过自身初始化的方法:
//1.使用旋转的角度和旋转轴向量(此向量为单位向量)来初始化角轴
AngleAxisd V1(M_PI / 4, Vector3d(0, 0, 1));//以(0,0,1)为旋转轴,旋转45度
cout << "Rotation_vector1" << endl << V1.matrix() << endl;- Q通过自身初始化的方法:
//1.使用旋转的角度和旋转轴向量(此向量为单位向量)来初始化四元数,即使用q=[cos(A/2),n_x*sin(A/2),n_y*sin(A/2),n_z*sin(A/2)]
Quaterniond Q1(cos((M_PI / 4) / 2), 0 * sin((M_PI / 4) / 2), 0 * sin((M_PI / 4) / 2), 1 * sin((M_PI / 4) / 2));//以(0,0,1)为旋转轴,旋转45度
cout << "Quaternion1" << endl << Q1.coeffs() << endl;
相关博客:
* C++矩阵库 Eigen 快速入门
* Eigen: C++开源矩阵计算工具——Eigen的简单用法
本系列文章为原创,转载请注明出处。
作者:Dongdong Bai
邮箱: baidongdong@nudt.edu
若您觉得本博文对您有帮助,请您为我点赞并关注我,以鼓励我写出更优秀的博文。谢谢!
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/180296.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
