大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
原文链接:http://huaqianlee.github.io/2016/04/27/Uav/Qualcomm-uav-blsp-port/
笔记:
1. 每一块BLSP对应六位,每一位对应一个GPIO,每一位的GPIO都可以作为UART、SPI、IIC的链接线
2. 需要通过平台的数据手册 来确定用哪块BLSP的哪个QUP链接是哪个GPIO,这些个GPIO支持的是什么类型的总线(三大总线之一),每一位又是作为三大总线的哪一条
3. BAM中断与外设中断:BAM中断意味着数据读取/写入完成 外设状态和错误的等级会引发外设中断
应用实例:
1.基础概念
(1) Bus Access Module (BAM),总线访问模块
BAM is used to move data to/from the peripheral buffers.
(2) BAM Low-Speed Peripheral (BLSP),低速接口的总线访问模块
(3) QUP:Qualcomm Universal Peripheral,高通统一的外设
2.Msm8937 BLSP

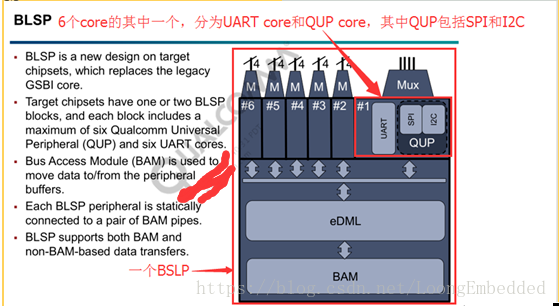
BLSP是高通对于低速接口的一种管理方式,8937 平台含有两个BLSP(BAM Low-Speed Peripheral) 块,对应于12个BLSP端口。 每一个BLSP块含有最多六个Qualcomm Universal Peripheral (QUP)和六个UART cores、其中SPI和IC2核心集成到一个名字为QUP核心,并且共享同一个FIFO,而UART_DM单独集成并有自己的FIFO,所有的这3个core共享同一个总线接口,也就是对外共用相同的I/O接口,比如:
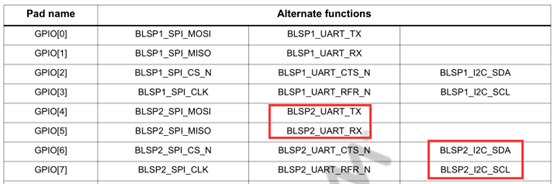
但是对于只使用两个UART引脚的UART_DM,比如只用到GPIO_4(TX)和GPIO_5(RX),也是使用两个引脚的I2C接口这时也可以同时使用:
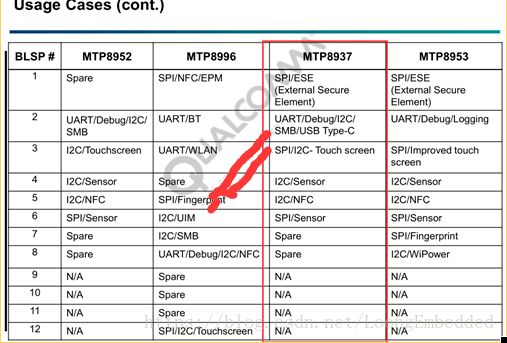
通过相关手册查询到每个外设属于BLSP多少。
3. 确认我们使用的I2C对应哪个BLSP和QUP
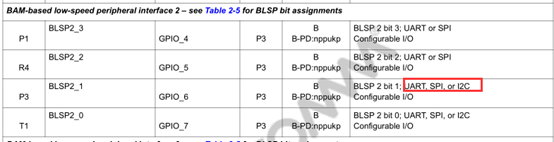
比如我们采用SDA—GPIO6,SCL—GPIO7,
(1) 到msm8937-pinctrl.dsti确认GPIO6和GPIO7对应设备树中是哪组I2C
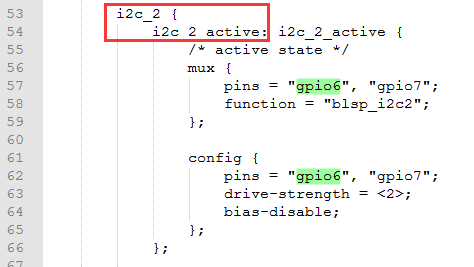
其实从上图可知道是第1个BLSP的第2个QUDP,但我们从设备树上找到相关的
(2) 通过i2c_2_active找到msm8937.dtsi下有引用
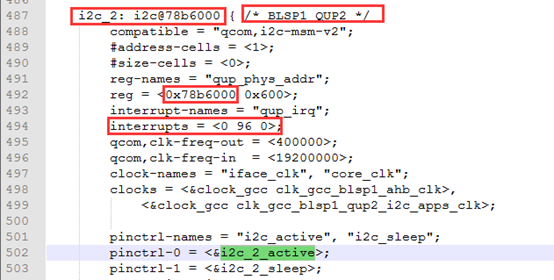
这里可知是采用BLSP1的QUP2,I2C核基准地址是0x78b6000
(3) Lk部分确定所用的I2C对应的BLSP和QUP
来看bootable\bootloader\lk\platform\msm_shared\include\blsp_qup.h下的定义
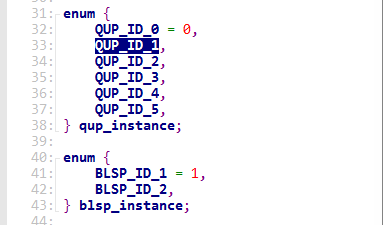
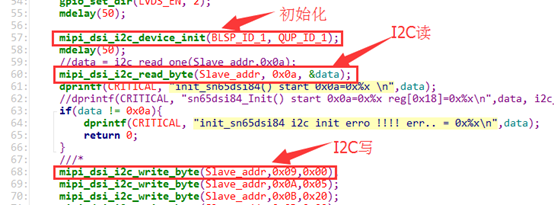
从这里可以看出QUP是从QUP_ID_0开始,那么我们的使用的GPIO6和GPIO7的I2C对应QUP_ID_1,使用示例如下:
4. QUP基地址和IRQs
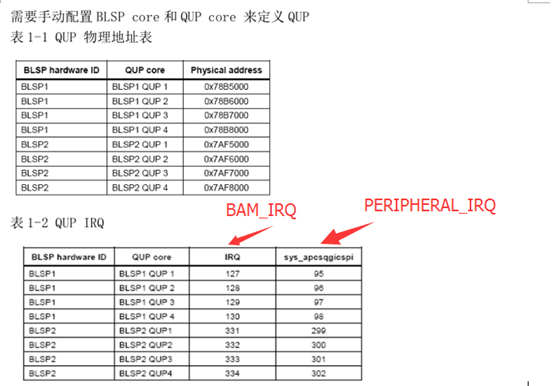
BLSP routes the following interrupts from its subcores:
BAM_IRQ – Indicates that a BAM operation has completed
PERIPHERAL_IRQ – Driven by UART or QUP; shared at the peripheral level for status updates and errors of the peripheral; a status register in the peripheral core allows software to distinguish between interrupt sources
参考:
高通无人机8074 BLSP接口说明
http://huaqianlee.github.io/2016/04/27/Uav/Qualcomm-uav-blsp-port/
高通APQ8074 spi 接口配置
https://blog.csdn.net/jumper511/article/details/25622833
———————
原文:https://blog.csdn.net/LoongEmbedded/article/details/83070030
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/180262.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
