大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
文章目录
近来由于需要用到 opencv 的SIFT特征,但是SIFT等功能已经移入了opencv_contrib 中,所以需要重新编译opencv和opencv_contrib。
一、下载与安装
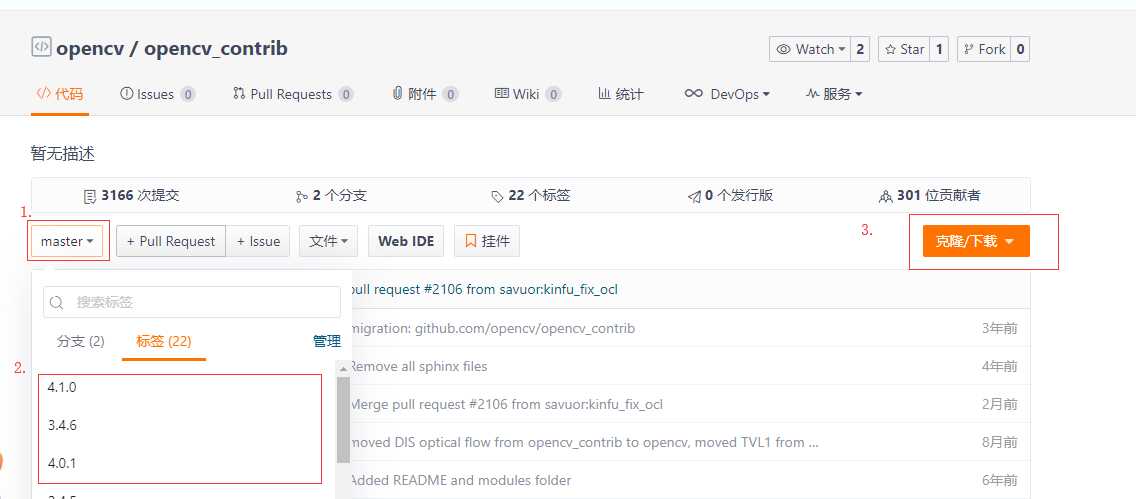
- 下载特定版本的 opencv和opencv_contrib,两者版本要一致。但是由于国内下载GitHub 有时候会非常慢,所以可以下载码云上面的库(opencv码云库和opencv_contrib码云库)。


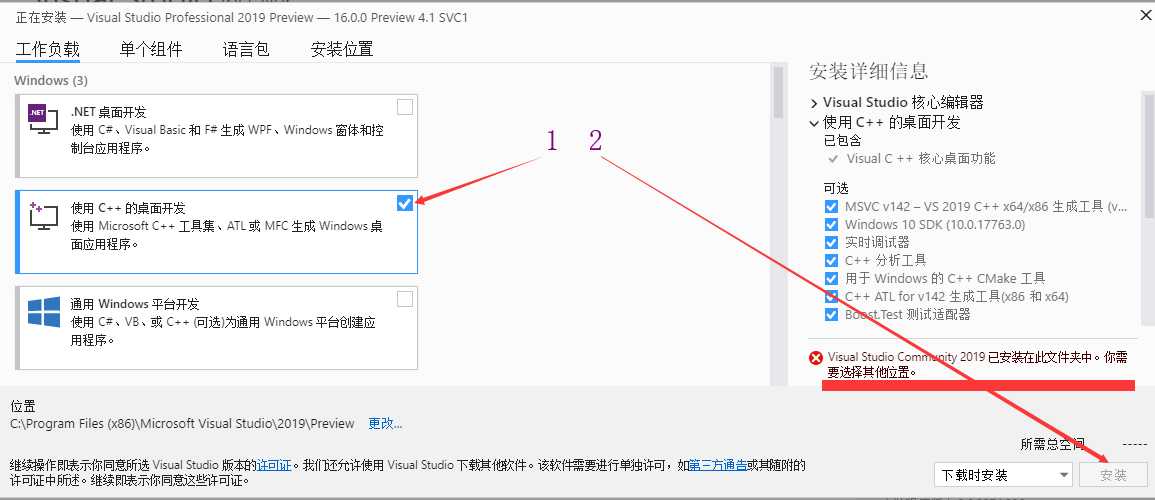
下载 CMake(https://cmake.org/download/) - 下载并安装 visual studio ,安装时添加
使用C++的桌面开发。
- 安装 CMake ,用CMake编译opencv和opencv_contrib

opencv 的 Windows安装包实质上是一个自解压文件,双击解压即可。
二、编译 opencv
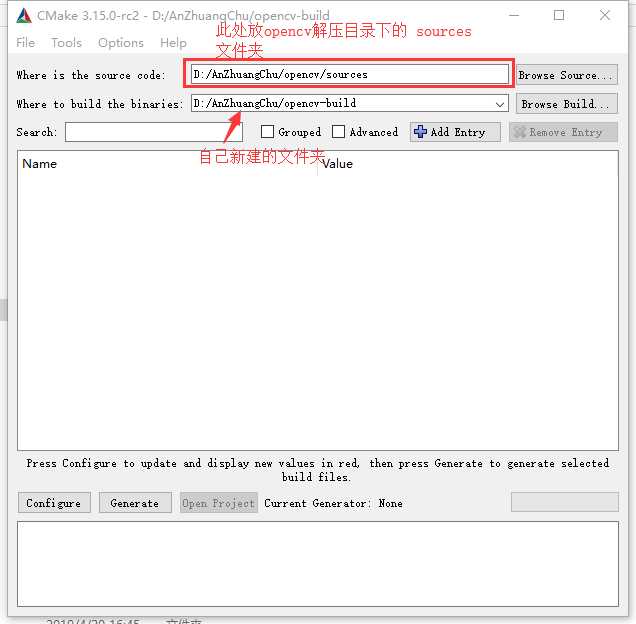
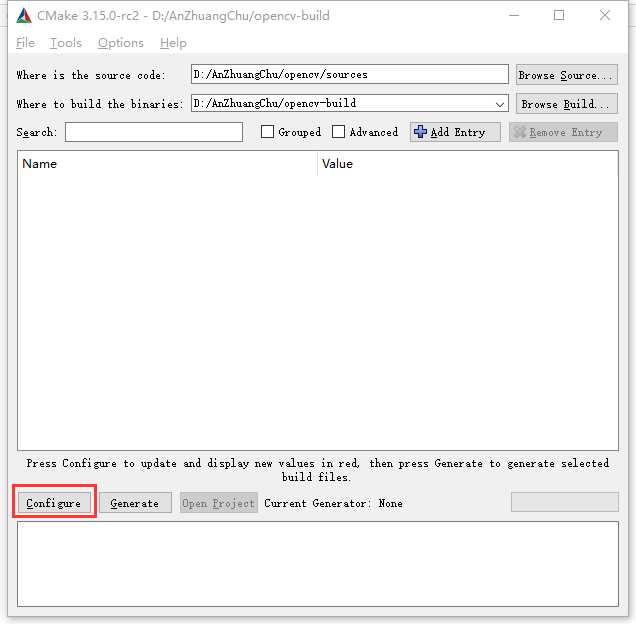
注意 source code 里面指向的不是opencv的解压目录而是里面的source目录。
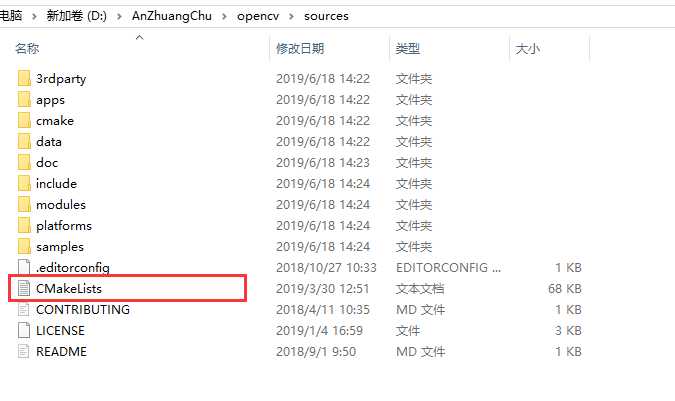
如图所示, source 文件夹下面有一个CMakeList.txt文件,如果路径错误,就会报CMake Error: The source directory "/opencv" does not appear to contain CMakeLists.txt.错误。
build 目录为自己建立的空目录
点击“ config ”
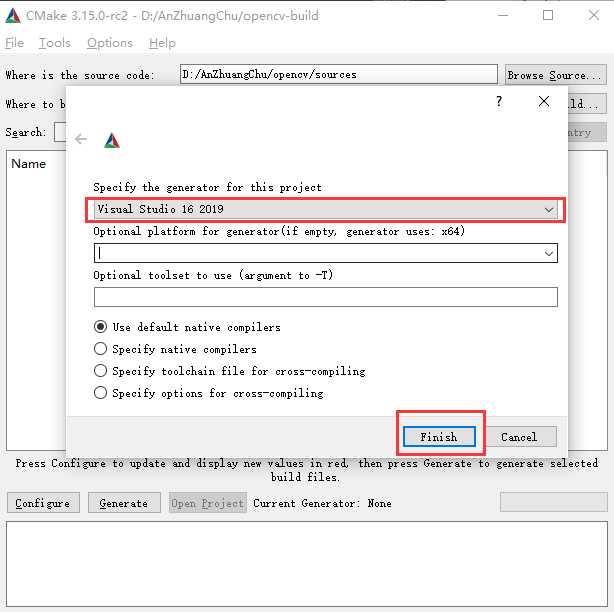
如下,看到自己安装的 visual studio 版本,点击finish。
开始编译,等待。
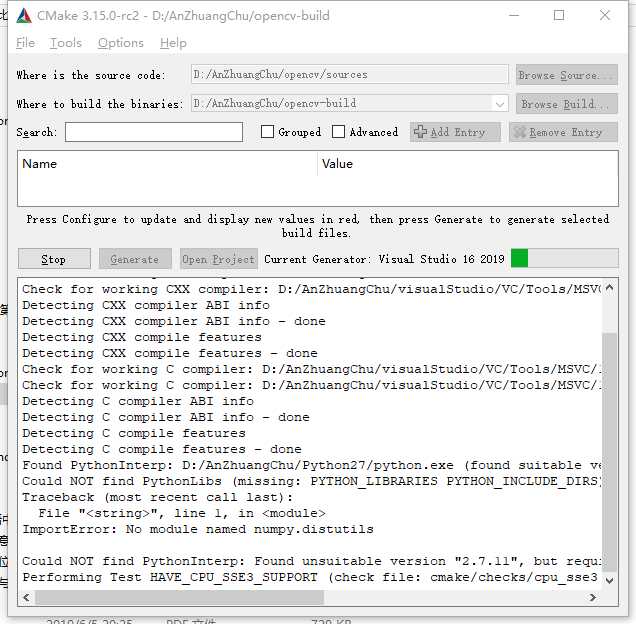
运气不好的话下方出现红色字体,就是有错误出现。如下图所示,是一些文件下载失败
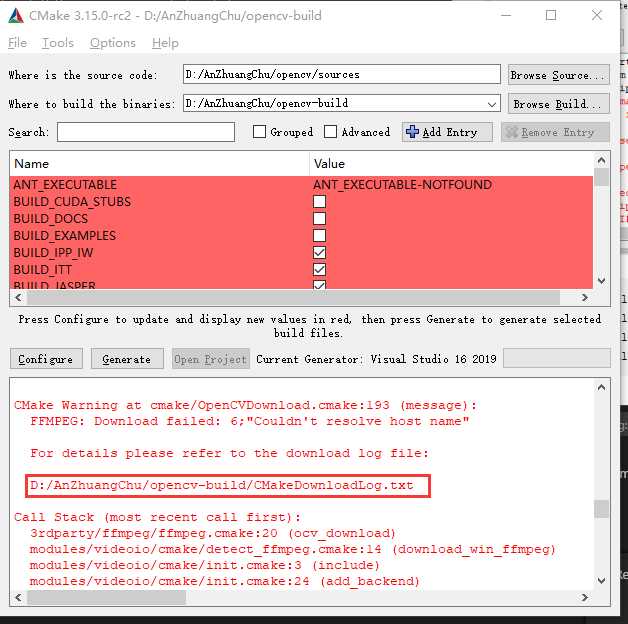
IPPICV: Download failed: 28;"Timeout was reached"
FFMPEG: Download failed: 6;"Couldn't resolve host name"
FFMPEG: Download failed: 6;"Couldn't resolve host name"
FFMPEG: Download failed: 6;"Couldn't resolve host name"
打开日志文件,使用里面的地址从浏览器里面下载文件。
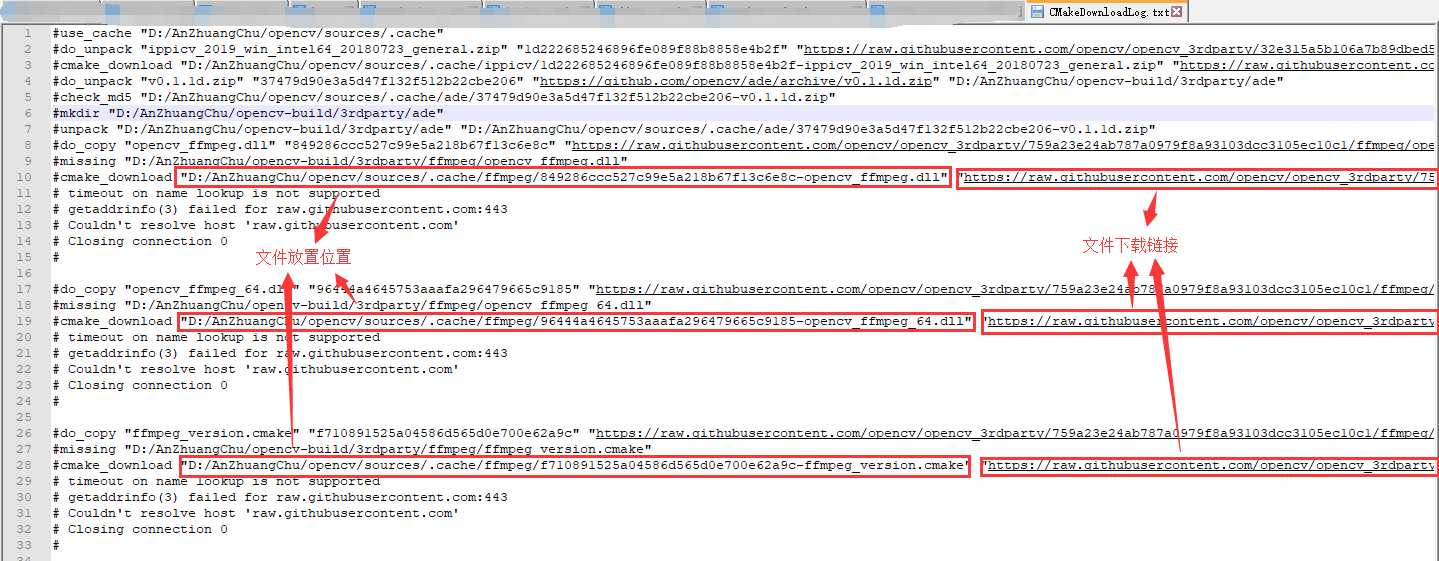
文件下载之后,放置在文件相应位置,并修改文件名。

可以看到原本路径下文件下载失败,所以是 0KB ,所以需要手动下载下来进行替换。
替换之后:

由于这几个文件可能下载起来比较慢,这里提供网盘链接:
ippicv_2019 链接: https://pan.baidu.com/s/1E5hY2gh-rZgHX2QM-VR8Rw 提取码: qs2w
ippicv_2017 链接: https://pan.baidu.com/s/1enrzXCm_BCgSOw-vnMJMpg 提取码:dsit
opencv_ffmpeg.dll 链接: https://pan.baidu.com/s/1qa4maq1mBKlCLJCTSRZ4PA 提取码:cdes
opencv_ffmpeg_64.dll 链接: https://pan.baidu.com/s/1WaL0h8NhmA2yW941-00_OQ 提取码:ryhy
当 CMake 界面上下两块都没有红色部分,且下方出现了Configuring done,点击generate按钮
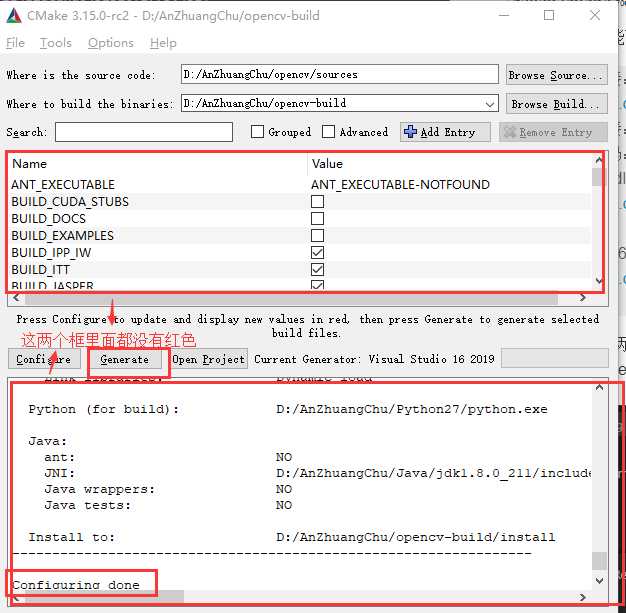
直到下方出现
Configuring done Generating done
此时说明 opencv 基本库编译完成。
如果按照默认编译过程,编译出的opencv文件夹会过大,可能接近26G,我们可以选择一些部分不需要config,包含:BUILD_DOCS
、BUILD_EXAMPLES、BUILD_PACKAGE、BUILD_TESTS、BUILD_PERF_TESTS、BUILD_opencv_python。(相关的一些说明)
方法是在 search 对话框中输入以上名称,然后取消这些的选中。
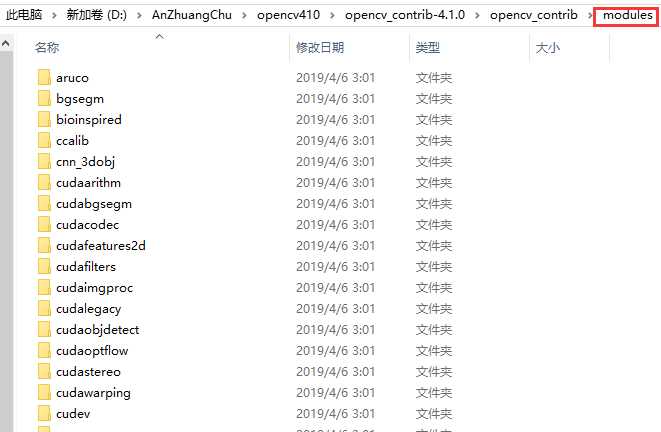
三、编译 opencv_contrib
在 search 对话框中输入OPENCV_EXTRA_MODULES_PATH,找到OPENCV_EXTRA_MODULES_PATH后在value中填入编译opencv_contrib解压目录中的modules路径(注意此处路径的反斜杠\要改成正斜杠/,反斜杠\有转义字符的意思)。目录错误则会出现Error in configuration process, project files may be invalid弹窗错误提醒。
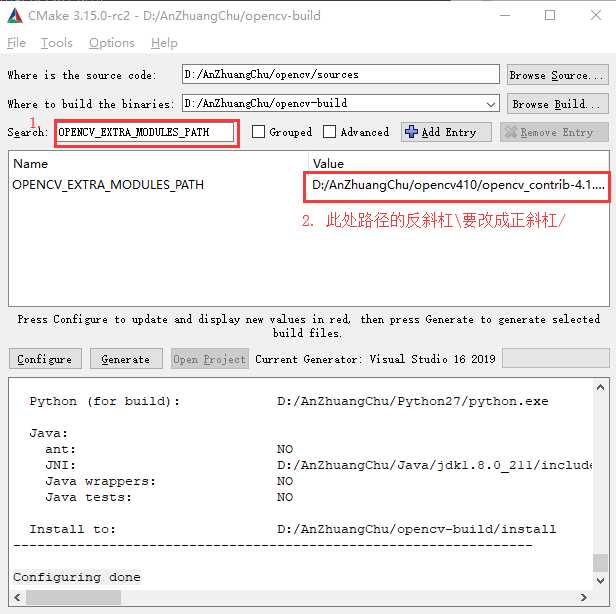
以下为路径错误时的弹窗:
在搜索栏中输入 OPENCV_ENABLE_NONFREE ,在value值中点击选中。如果没有选中,那么类似SIFT这种已经被申请专利的方法就无法使用。
然后点击 configure
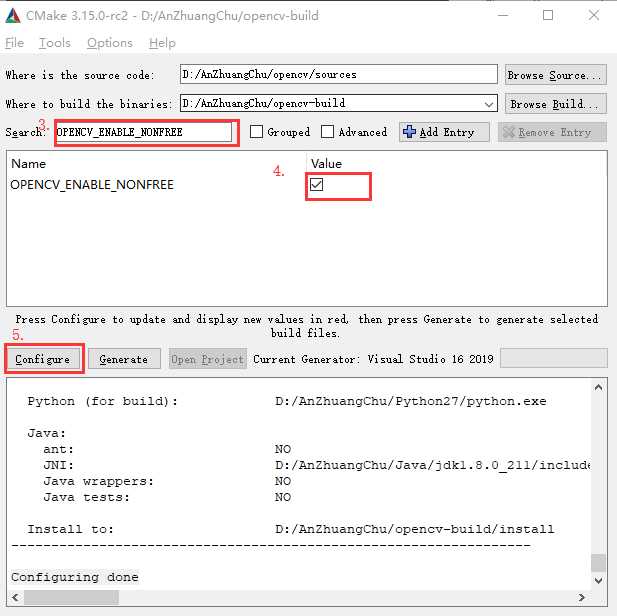
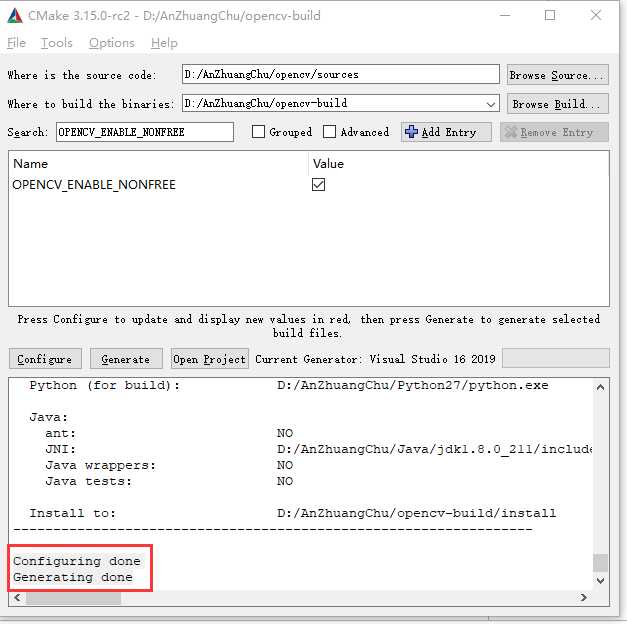
在下方出现 Configuring done 之后,点击Generate
和 opencv 基本库编译一样,CMake下方出现Configuring done Generating done,说明opencv_contrib 编译完成。
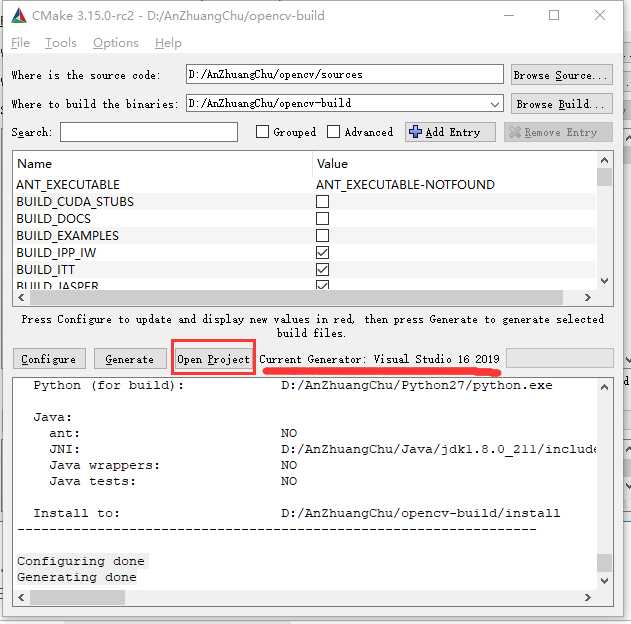
四、 visual studio 编译
然后点击 Open Project ,会使用之前选择的特定版本visual studio打开。
选择 生成->批生成
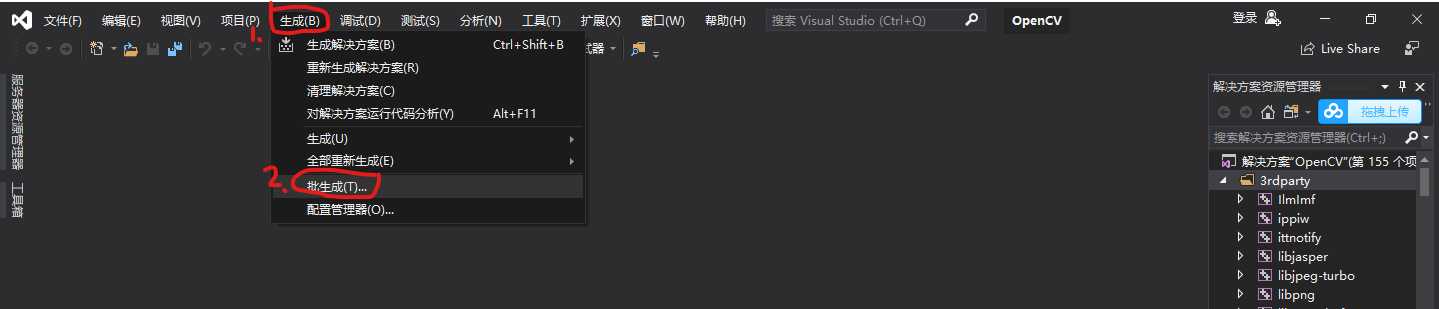
在弹出的窗口里面选择的 debug 和release的ALL_BUILD和INATALL,然后点击“生成”。
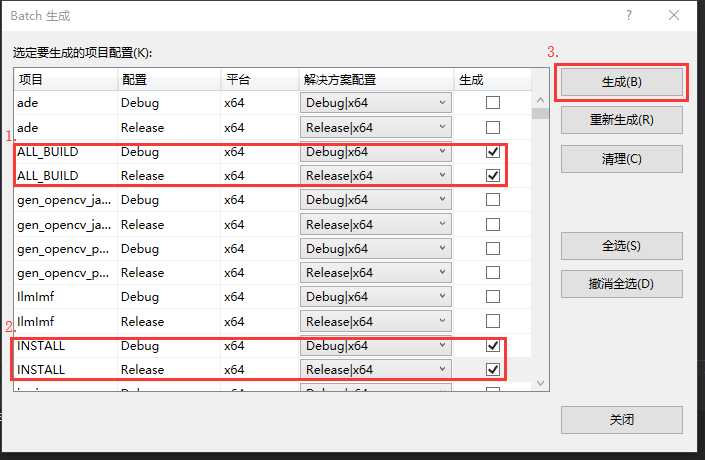
该过程会需要较长时间。
五、配置 opencv 环境
配置系统环境变量
生成结束之后,需要修改环境变量。
环境变量在“此电脑”->“属性”->“高级系统设置”->“环境变量”,在用户变量里面的 Path 变量后面添加之前CMake设置的build目录\install\x64\vc16\bin,确定,退出。
如果 visual studio 在修改环境变量之前就打开了,需要重启visual studio
重新配置项目环境
visual studio 中右击项目->“属性”,
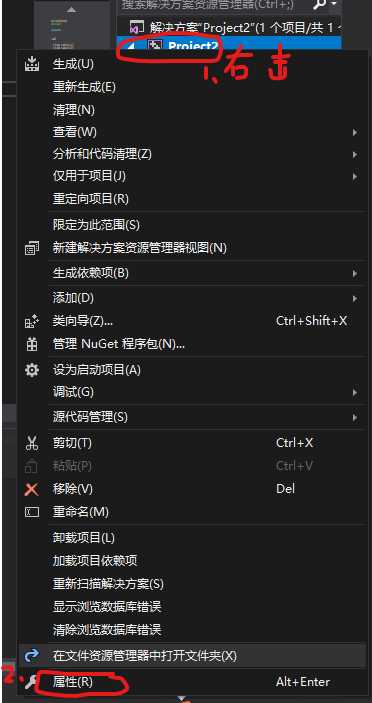
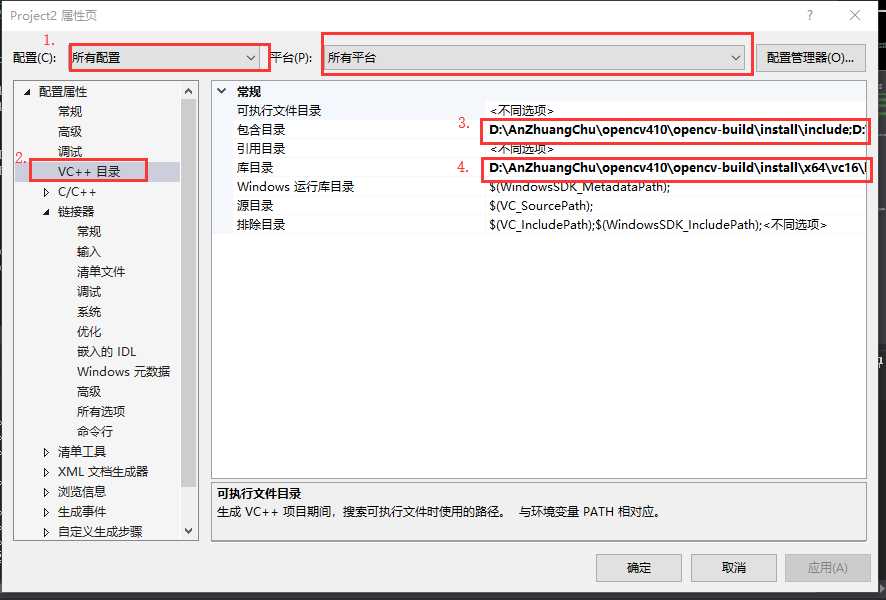
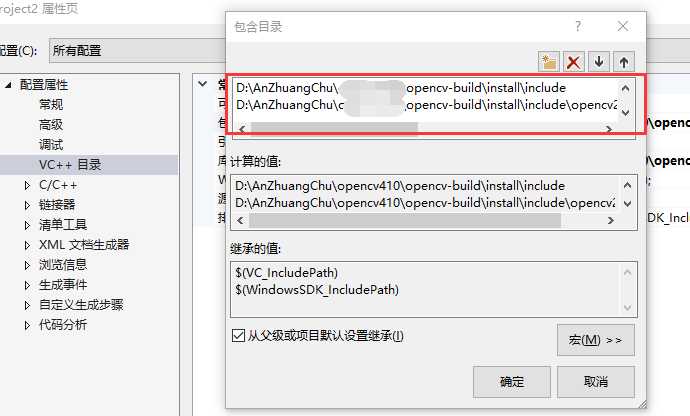
首先可以选择“所有配置” “所有平台”,编辑包含目录和库目录
包含目录编辑为
生成的 build 目录\install\include
生成的 build 目录\install\include\opencv2
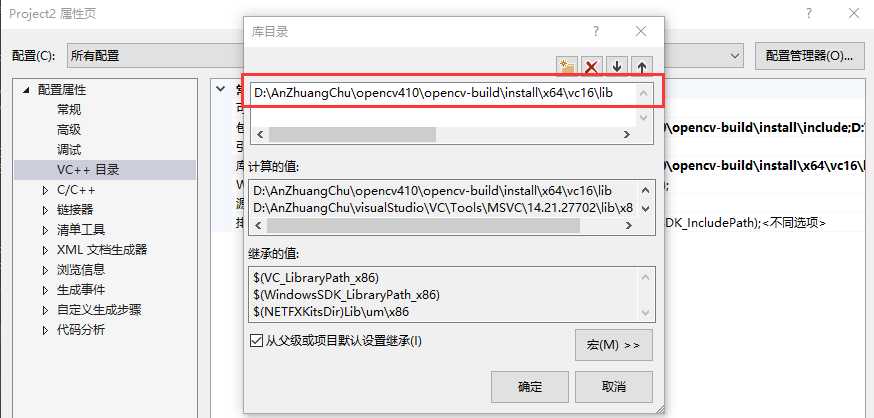
库目录编辑为:
生成的 build 目录\install\x64\vc16\lib
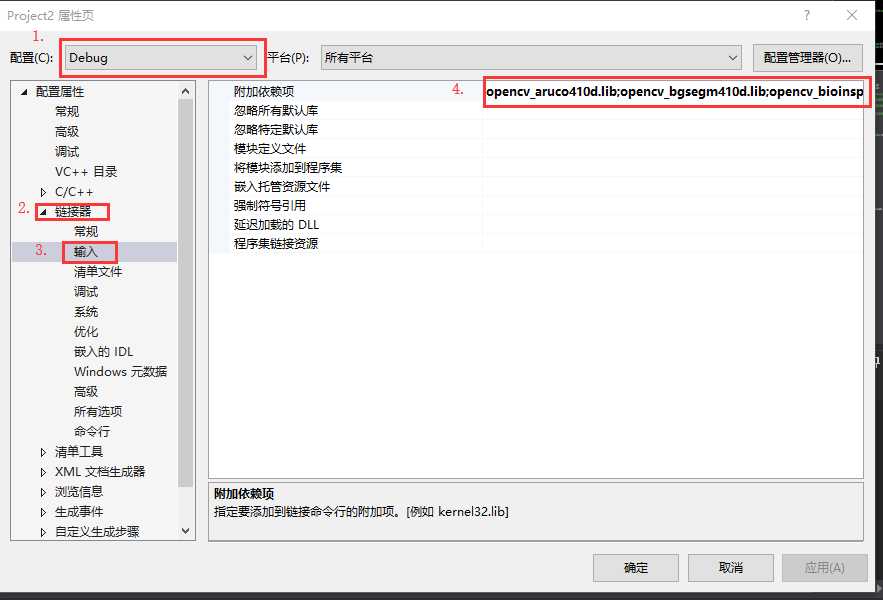
编辑包含目录和库目录之后,需要添加附加依赖项,此时需要分别针对 debug 和release两种模式添加。
打开 生成的build目录\install\x64\vc16\lib可以发现每个lib文件都有两种,一种是以d.lib结尾,另一种只比前一种少了一个d,只以.lib结尾。debug模式需要d.lib结尾文件,release模式需要.lib结尾文件,任何一种模式配置错误,就不能以该模式运行opencv。
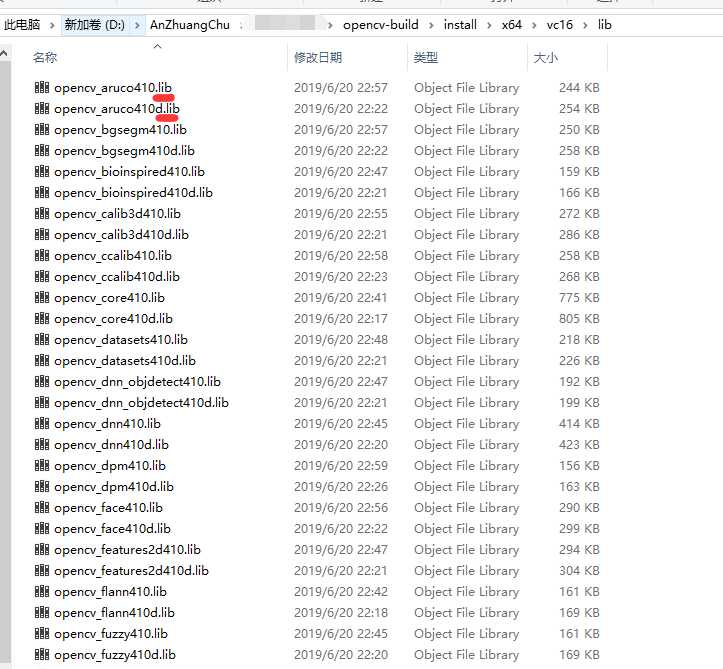
所以需要在编辑附加依赖项时添加各自需要的文件名。
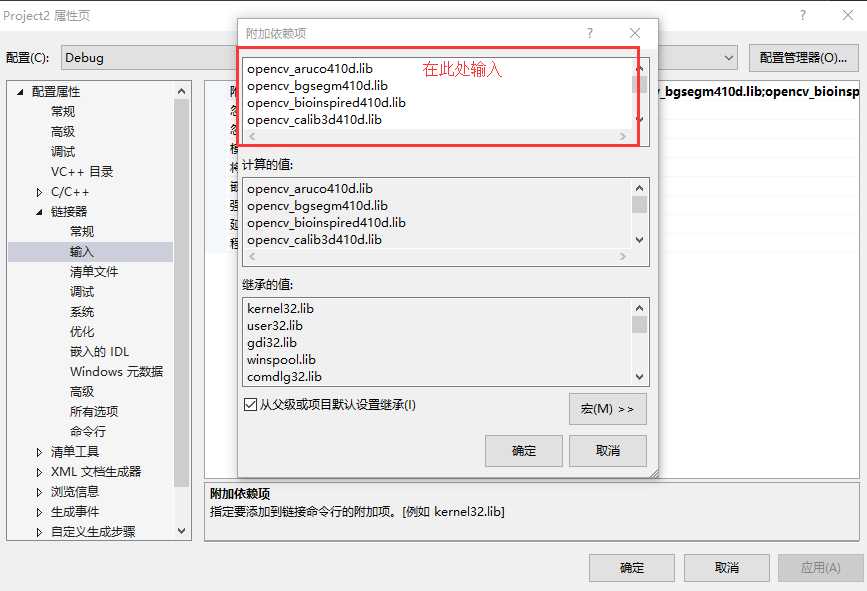
可以通过命令行整理,也可以用下面的:
debug 模式:
opencv_aruco410d.lib
opencv_bgsegm410d.lib
opencv_bioinspired410d.lib
opencv_calib3d410d.lib
opencv_ccalib410d.lib
opencv_core410d.lib
opencv_datasets410d.lib
opencv_dnn410d.lib
opencv_dnn_objdetect410d.lib
opencv_dpm410d.lib
opencv_face410d.lib
opencv_features2d410d.lib
opencv_flann410d.lib
opencv_fuzzy410d.lib
opencv_gapi410d.lib
opencv_hfs410d.lib
opencv_highgui410d.lib
opencv_imgcodecs410d.lib
opencv_imgproc410d.lib
opencv_img_hash410d.lib
opencv_line_descriptor410d.lib
opencv_ml410d.lib
opencv_objdetect410d.lib
opencv_optflow410d.lib
opencv_phase_unwrapping410d.lib
opencv_photo410d.lib
opencv_plot410d.lib
opencv_quality410d.lib
opencv_reg410d.lib
opencv_rgbd410d.lib
opencv_saliency410d.lib
opencv_shape410d.lib
opencv_stereo410d.lib
opencv_stitching410d.lib
opencv_structured_light410d.lib
opencv_superres410d.lib
opencv_surface_matching410d.lib
opencv_text410d.lib
opencv_tracking410d.lib
opencv_video410d.lib
opencv_videoio410d.lib
opencv_videostab410d.lib
opencv_xfeatures2d410d.lib
opencv_ximgproc410d.lib
opencv_xobjdetect410d.lib
opencv_xphoto410d.lib
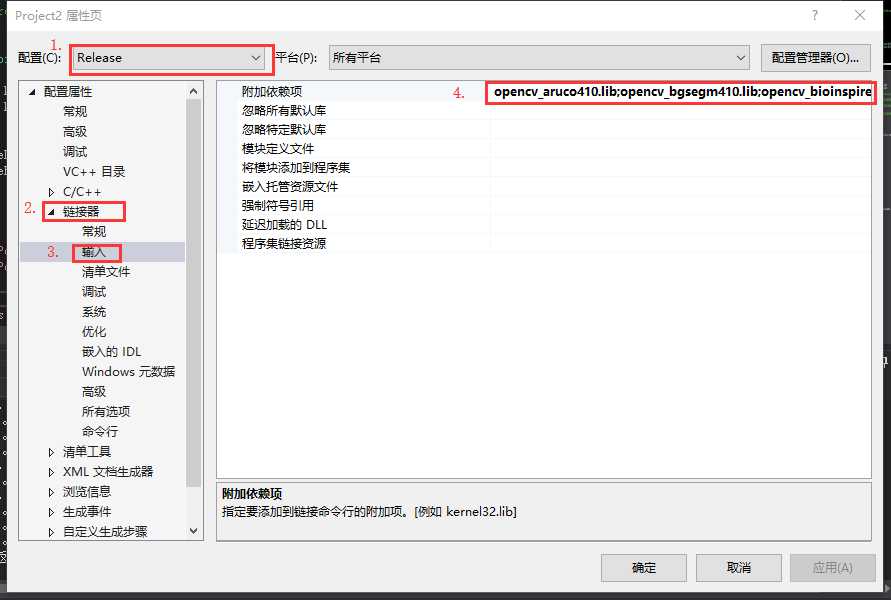
release 模式:
opencv_aruco410.lib
opencv_bgsegm410.lib
opencv_bioinspired410.lib
opencv_calib3d410.lib
opencv_ccalib410.lib
opencv_core410.lib
opencv_datasets410.lib
opencv_dnn410.lib
opencv_dnn_objdetect410.lib
opencv_dpm410.lib
opencv_face410.lib
opencv_features2d410.lib
opencv_flann410.lib
opencv_fuzzy410.lib
opencv_gapi410.lib
opencv_hfs410.lib
opencv_highgui410.lib
opencv_imgcodecs410.lib
opencv_imgproc410.lib
opencv_img_hash410.lib
opencv_line_descriptor410.lib
opencv_ml410.lib
opencv_objdetect410.lib
opencv_optflow410.lib
opencv_phase_unwrapping410.lib
opencv_photo410.lib
opencv_plot410.lib
opencv_quality410.lib
opencv_reg410.lib
opencv_rgbd410.lib
opencv_saliency410.lib
opencv_shape410.lib
opencv_stereo410.lib
opencv_stitching410.lib
opencv_structured_light410.lib
opencv_superres410.lib
opencv_surface_matching410.lib
opencv_text410.lib
opencv_tracking410.lib
opencv_video410.lib
opencv_videoio410.lib
opencv_videostab410.lib
opencv_xfeatures2d410.lib
opencv_ximgproc410.lib
opencv_xobjdetect410.lib
opencv_xphoto410.lib
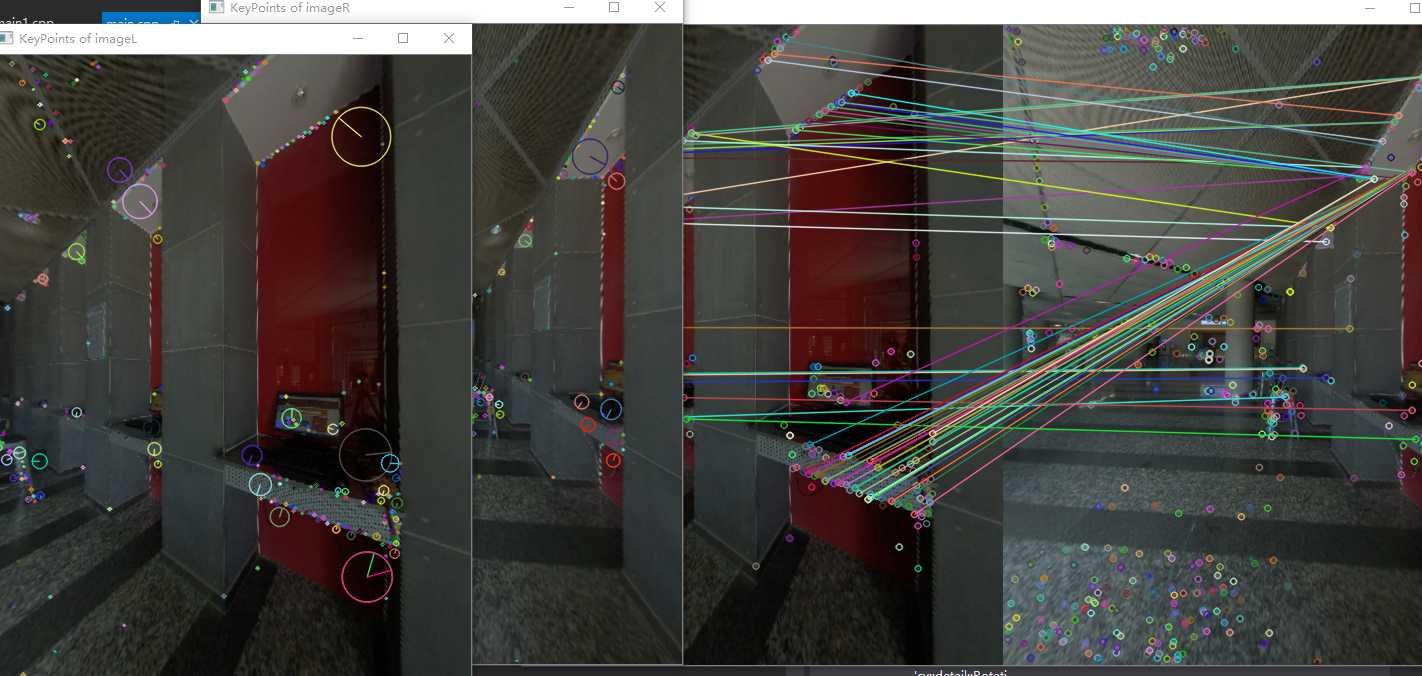
六、测试
配置完成之后使用以下代码测试(修改为自己的图片路径):
#include <opencv2/opencv.hpp>
#include <opencv2/xfeatures2d.hpp>
//#include <opencv2/>
using namespace std;
using namespace cv;
int main()
{
cv::Mat imageL = cv::imread("origin_1.jpg");
cv::Mat imageR = cv::imread("origin_2.jpg");
/*imshow("1", imageL); imshow("2", imageR); waitKey(); return 0;*/
//提取特征点方法
//SIFT
cv::Ptr<cv::xfeatures2d::SIFT> sift = cv::xfeatures2d::SIFT::create();
//ORB
//cv::Ptr<cv::ORB> orb = cv::ORB::create();
//SURF
//cv::Ptr<cv::xfeatures2d::SURF> surf = cv::xfeatures2d::SURF::create();
//特征点
std::vector<cv::KeyPoint> keyPointL, keyPointR;
//单独提取特征点
sift->detect(imageL, keyPointL);
sift->detect(imageR, keyPointR);
//画特征点
cv::Mat keyPointImageL;
cv::Mat keyPointImageR;
drawKeypoints(imageL, keyPointL, keyPointImageL, cv::Scalar::all(-1), cv::DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
drawKeypoints(imageR, keyPointR, keyPointImageR, cv::Scalar::all(-1), cv::DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
//显示窗口
cv::namedWindow("KeyPoints of imageL");
cv::namedWindow("KeyPoints of imageR");
//显示特征点
cv::imshow("KeyPoints of imageL", keyPointImageL);
cv::imshow("KeyPoints of imageR", keyPointImageR);
//特征点匹配
cv::Mat despL, despR;
//提取特征点并计算特征描述子
sift->detectAndCompute(imageL, cv::Mat(), keyPointL, despL);
sift->detectAndCompute(imageR, cv::Mat(), keyPointR, despR);
//Struct for DMatch: query descriptor index, train descriptor index, train image index and distance between descriptors.
//int queryIdx –>是测试图像的特征点描述符( descriptor )的下标,同时也是描述符对应特征点(keypoint)的下标。
//int trainIdx –> 是样本图像的特征点描述符的下标,同样也是相应的特征点的下标。
//int imgIdx –>当样本是多张图像的话有用。
//float distance –>代表这一对匹配的特征点描述符(本质是向量)的欧氏距离,数值越小也就说明两个特征点越相像。
std::vector<cv::DMatch> matches;
//如果采用 flannBased 方法 那么 desp通过orb的到的类型不同需要先转换类型
if (despL.type() != CV_32F || despR.type() != CV_32F)
{
despL.convertTo(despL, CV_32F);
despR.convertTo(despR, CV_32F);
}
cv::Ptr<cv::DescriptorMatcher> matcher = cv::DescriptorMatcher::create("FlannBased");
matcher->match(despL, despR, matches);
//计算特征点距离的最大值
double maxDist = 0;
for (int i = 0; i < despL.rows; i++)
{
double dist = matches[i].distance;
if (dist > maxDist)
maxDist = dist;
}
//挑选好的匹配点
std::vector< cv::DMatch > good_matches;
for (int i = 0; i < despL.rows; i++)
{
if (matches[i].distance < 0.5 * maxDist)
{
good_matches.push_back(matches[i]);
}
}
cv::Mat imageOutput;
cv::drawMatches(imageL, keyPointL, imageR, keyPointR, good_matches, imageOutput);
cv::namedWindow("picture of matching");
cv::imshow("picture of matching", imageOutput);
cv::waitKey(0);
return 0;
}
结果:
参考链接:
- OpenCV 学习笔记 06 SIFT 使用中出现版权问题 error: (-213:The function/feature is not implemented)
- OpenCV3.1.0 安装配置与 OpenCV_contrib库配置
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/180180.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
