大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
博主联系方式:
QQ:1540984562
QQ交流群:892023501
群里会有往届的smarters和电赛选手,群里也会不时分享一些有用的资料,有问题可以在群里多问问。
目录
原理讲解
【1】为何选取角点作为特征?
角点是一种局部特征。
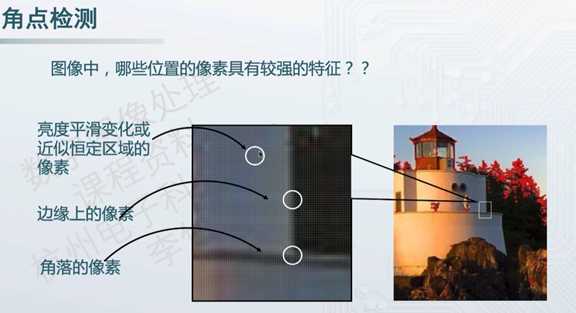

角落上的可区分性特别强,边缘次之,平滑区域则基本没有区分性。
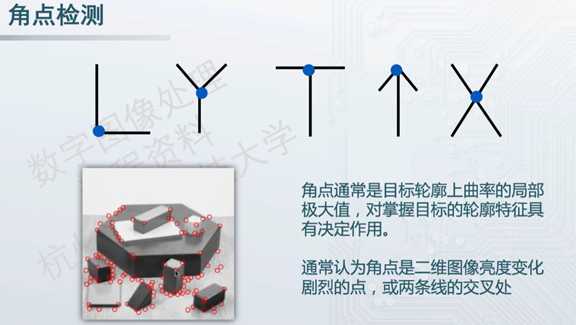
【2】角点的定义:
【3】判断角点的方法:
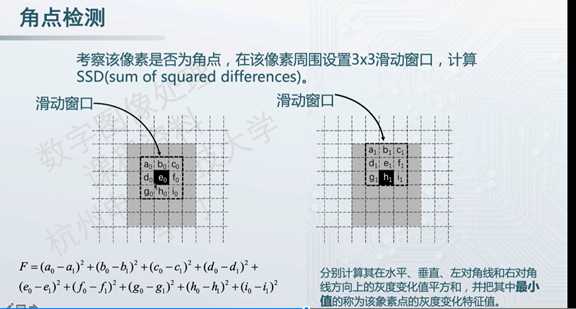
这里有个细节:将计算的所有方向上的变化值平方和的最小值作为像素点的灰度变化特征值。为何是最小值呢?
分别对平均区域、边缘区域、角落区域进行计算,观察结果:
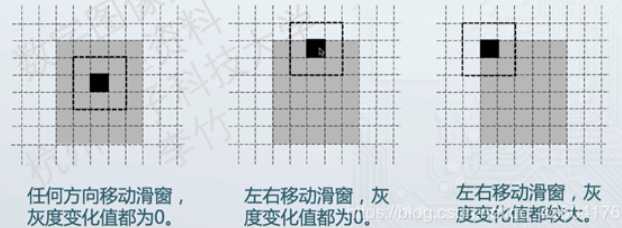
取最小值,这样边缘的特征值为0了,将边缘与角点区分开来。(边缘的特点是一个方向变化值不明显,与之垂直的方向变化值明显)
这种方法的缺点:
滑动窗口缺点:窗口滑动只有8个方向,当边缘角落的角度不在这8个方向上则检测不准。
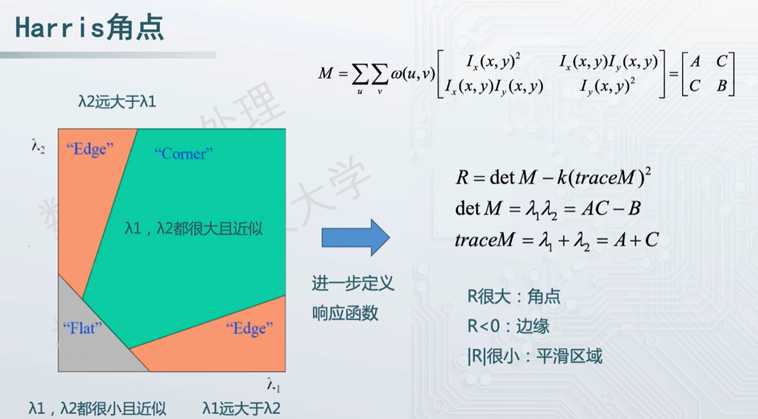
【4】Harris角点检测法
Harris角点检测法使用特征值的方式,使得任何方向上的角点都可以被检测出来。
数学定义:
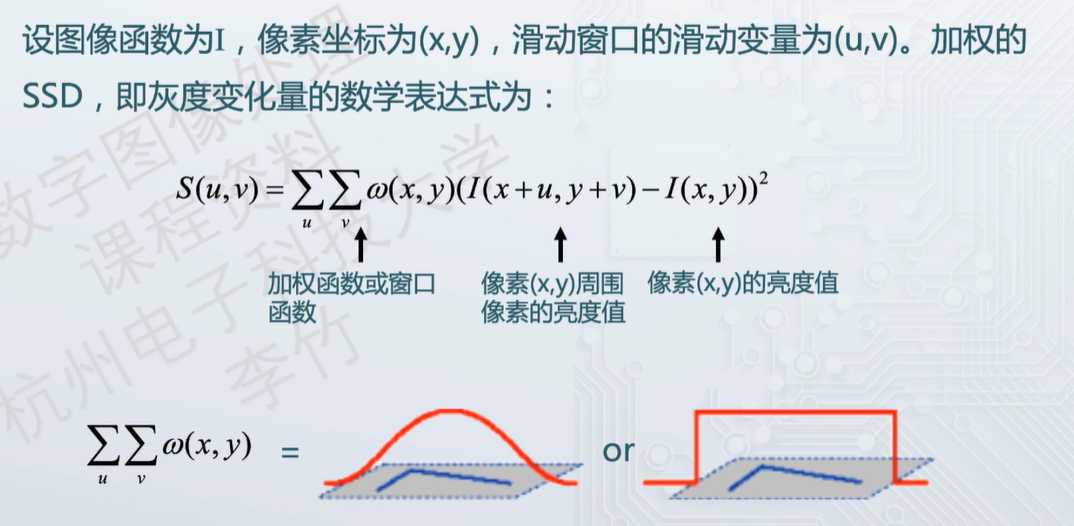
加权函数形式:高斯分布形式、均值函数形式
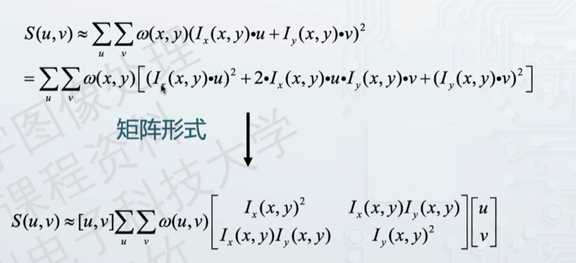
公式继续化简:
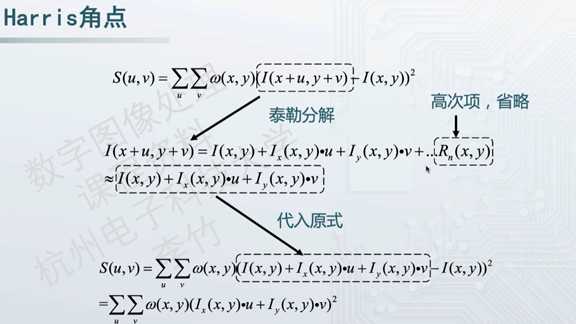
泰勒公式回顾:
由于图像是二元函数,这里只取,x和y方向上的一阶导数做近似。

海森矩阵:

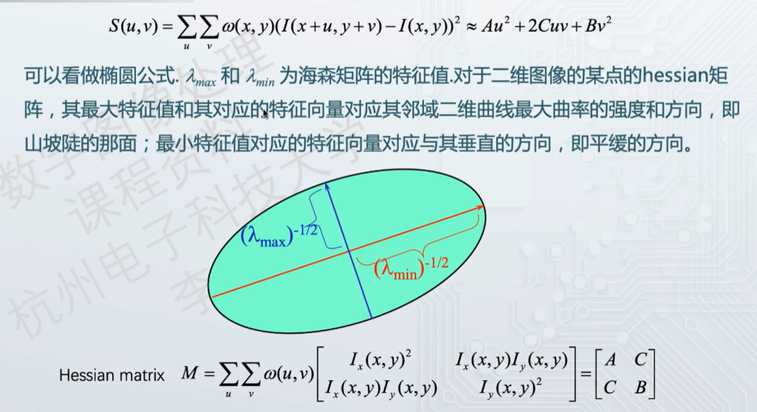
平原地区,四周望去皆是平坦,最陡峭和最不陡峭的地方陡峭程度差不多。
悬崖地区,水平方向上望去很平坦,从其垂直方向看去,十分陡峭。
站立山尖,四周皆是十分陡峭。
R称之为响应函数,k根据经验取0.02~0.04左右
示例
Opencv自带函数:cornerHarris()函数
void cornerHarris( InputArray src, OutputArray dst, int block Size, int ksize, double k, int borderType = BORDER_DEFAULT)
1.InputArray类型的src,输入图像,即原图像,填Mat类型即可,且需要为单通道8位或者浮点型图像;
2.OutputArray类型的dst,函数调用后的运算结果存在这里,即这个参数用于存放Harris角点检测的输出结果,和原图片有一样的尺寸和类型;
3.int类型的blockSize,表示邻域的大小,更多详细信息在cornerEigenValsAndVecs()中讲到;
4.int类型的ksize,表示Sobel()算子的孔径的大小;
5.double类型的k,Harris参数;
6.int类型的borderType,图像像素的边界模式。注意它有默认值BORDER_DEFAULT;
示例程序1
int main()
{
//改变控制台字体颜色
system("color 02");
//读取图像
//Mat src_image = imread("D:\\opencv_picture_test\\霍夫变换\\霍夫变换.png", 0);
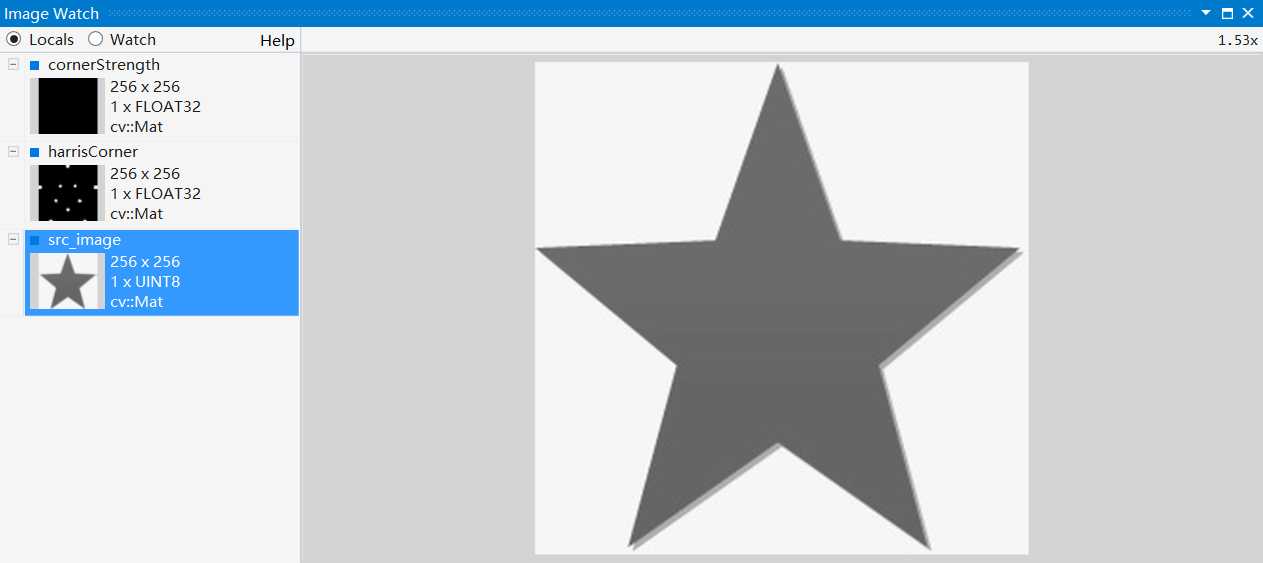
Mat src_image = imread("D:\\opencv_picture_test\\角点检测\\五角星.jpg", 0);
//出错判断
if (!src_image.data)
{
cout << "src image load failed!" << endl;
return -1;
}
//进行角点检测,找出角点
Mat cornerStrength;
cornerHarris(src_image, cornerStrength,2,3,0.03);
//对灰度图进行阈值操作,得到二值图并显示
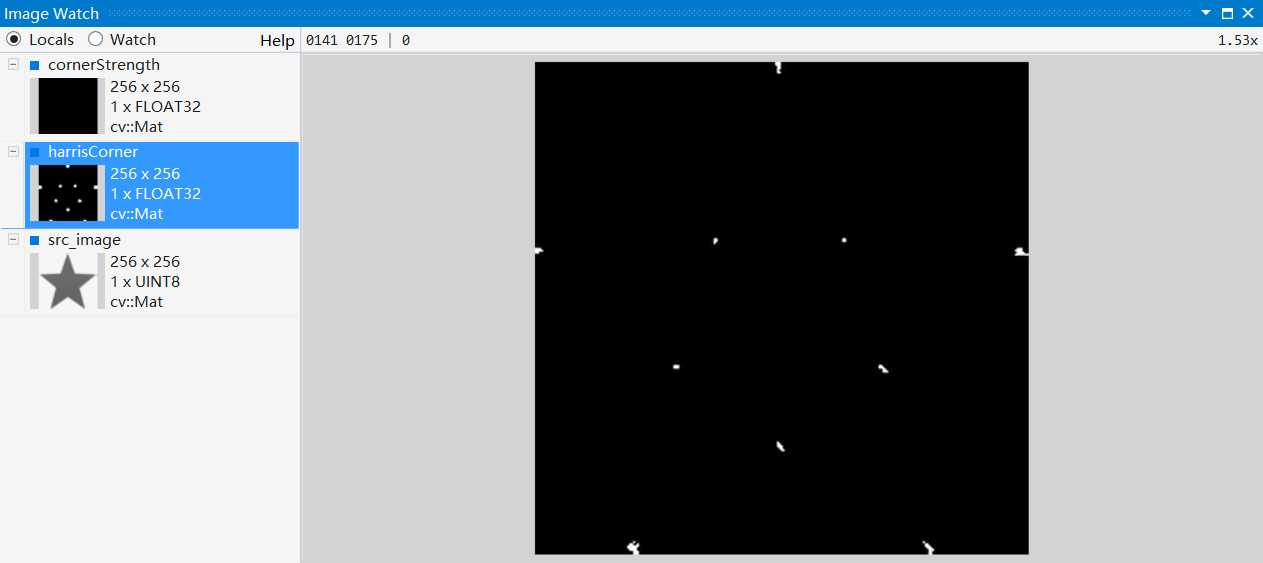
Mat harrisCorner;
threshold(cornerStrength, harrisCorner,0.00001,255,THRESH_BINARY);
//显示
namedWindow("角点图", WINDOW_NORMAL);
imshow("角点图", cornerStrength);
namedWindow("二值图", WINDOW_NORMAL);
imshow("二值图", harrisCorner);
waitKey(0);
return 0;
}
需要注意的是:角点计算后需要进行二值化才能较好地可视化角点。最好是归一化一下。
原图:
cornerStrength角点图:
harrisCorner二值化后的角点图:
示例程序2
#include <opencv2/opencv.hpp>
#include <iostream>
#include "windows.h"
#include <stdio.h>
#include <time.h>
#include <math.h>
//#include "My_ImageProssing_base.h"
#define WINDOW_NAME1 "【程序窗口1】"
#define WINDOW_NAME2 "【程序窗口2】"
using namespace cv;
using namespace std;
RNG g_rng(12345);
//*--------------------------动态角点检测-------------------------------------*/
Mat g_srcImage, g_srcImage1, g_grayImage;
int thresh = 20;
int max_thresh = 205;
void on_CornerHarris(int ,void*);
int main()
{
//改变控制台字体颜色
system("color 02");
//读取图像
//Mat src_image = imread("D:\\opencv_picture_test\\霍夫变换\\霍夫变换.png", 0);
g_srcImage = imread("D:\\opencv_picture_test\\角点检测\\五角星.jpg", 1);
//出错判断
if (!g_srcImage.data)
{
cout << "src image load failed!" << endl;
return -1;
}
//namedWindow("原始图", WINDOW_NORMAL);
//imshow("原始图", g_srcImage);
g_srcImage1 = g_srcImage.clone();
cvtColor(g_srcImage1, g_grayImage,COLOR_BGR2GRAY);
//创建窗口和滑动条
namedWindow(WINDOW_NAME1, WINDOW_NORMAL);
createTrackbar("阈值",WINDOW_NAME1,&thresh,max_thresh, on_CornerHarris);
//初始化回调函数
on_CornerHarris(0,0);
waitKey(0);
return 0;
}
void on_CornerHarris(int, void*)
{
//定义局部变量
Mat dstImage;
Mat normImage; //归一化
Mat scaleImage; //线性变换后的八位无符号整型的图
//初始化,清除上一次调用次函数时他们的值
dstImage = Mat::zeros(g_srcImage.size(),CV_32FC1);
g_srcImage1 = g_srcImage.clone();
//进行角点检测,找出角点
Mat cornerStrength;
cornerHarris(g_grayImage, dstImage, 2, 3, 0.03);
//归一化与转换
normalize(dstImage, normImage,0,255,NORM_MINMAX,CV_32FC1,Mat());
convertScaleAbs(normImage, scaleImage); //将归一化后的图线性变换成8位无符号整数
//进行绘制
for (int j = 0;j < normImage.rows;j++)
{
for (int i = 0;i < normImage.rows;i++)
{
Scalar color = Scalar(g_rng.uniform(0, 255), g_rng.uniform(0, 255), g_rng.uniform(0, 255));//任意值
if ((int)normImage.at<float>(j, i) > thresh+60)
{
circle(g_srcImage1,Point(i,j),5, color,2,8,0);
circle(scaleImage, Point(i, j), 5, color, 2, 8, 0);
}
}
}
imshow(WINDOW_NAME1, g_srcImage1);
imshow(WINDOW_NAME2, scaleImage);
}
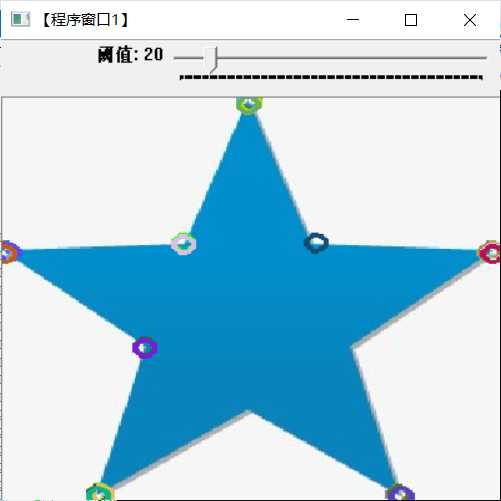
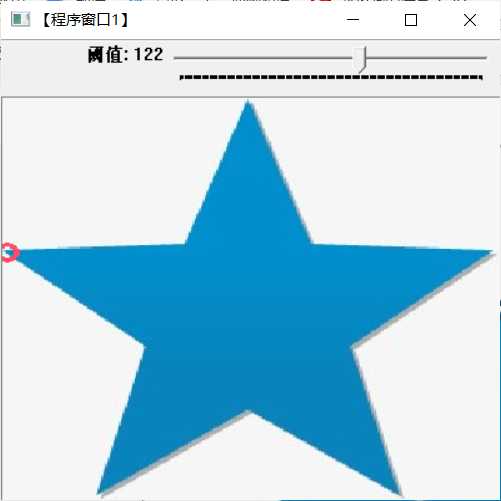
需要注意的是,当阈值较小的时候,可能会“检测”出若干个角点,绘制时会卡住,所以需要限制一下,这里我们去最低为60。
效果:
参考资料:
《Opencv3编程入门.毛星云版》
《数字图像处理PPT.李竹版》
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/179489.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
