大家好,又见面了,我是你们的朋友全栈君。
上一篇开头提到了一些可用于磨皮的去噪算法,下面我们实现这些算法并且观察效果,咱不考虑实时性的问题
该算法利用图像局部统计特性进行滤波处理,例如NXM像素的灰度图,首先计算点(i,j)所在窗口内(大小为(2n+1)(2m+1))的平均值m(i,j)


以及均方差:

得到加性去噪后的结果为:

其中:

1.根据原文提出的优化方法,首先是建立两个积分图,如图所示,点4的积分即为Sum(Ra)+Sum(Rb)+Sum(Rc)+Sum(Rd)。积分图的建立算法可以参考这篇文章进行简单优化,然后即可根据积分图计算公式中的m值和v值。
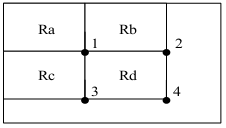
例如半径为r的窗口的m(i,j)为Integral(i+r,j+r) + Integral(i-r-1,j-r-1)-Integral(i+r,j-r-1)-Integral(i-r-1,j+r)。代码如下,分别求1次方和平方的积分图。
void MagicBeauty::initIntegral(uint8_t* inputMatrix){
LOGE(“initIntegral start”);
if(mIntegralMatrix == NULL)
mIntegralMatrix = new uint64_t[mImageWidth * mImageHeight];
if(mIntegralMatrixSqr == NULL)
mIntegralMatrixSqr = new uint64_t[mImageWidth * mImageHeight];
uint64_t *columnSum = new uint64_t[mImageWidth];
uint64_t *columnSumSqr = new uint64_t[mImageWidth];
columnSum[0] = inputMatrix[0];
columnSumSqr[0] = inputMatrix[0] * inputMatrix[0];
mIntegralMatrix[0] = columnSum[0];
mIntegralMatrixSqr[0] = columnSumSqr[0];
for(int i = 1;i < mImageWidth;i++){
columnSum[i] = inputMatrix[i];
columnSumSqr[i] = inputMatrix[i] * inputMatrix[i];
mIntegralMatrix[i] = columnSum[i];
mIntegralMatrix[i] += mIntegralMatrix[i-1];
mIntegralMatrixSqr[i] = columnSumSqr[i];
mIntegralMatrixSqr[i] += mIntegralMatrixSqr[i-1];
}
for (int i = 1;i < mImageHeight; i++){
int offset = i * mImageWidth;
columnSum[0] += inputMatrix[offset];
columnSumSqr[0] += inputMatrix[offset] * inputMatrix[offset];
mIntegralMatrix[offset] = columnSum[0];
mIntegralMatrixSqr[offset] = columnSumSqr[0];
// other columns
for(int j = 1; j < mImageWidth; j++){
columnSum[j] += inputMatrix[offset+j];
columnSumSqr[j] += inputMatrix[offset+j] * inputMatrix[offset+j];
mIntegralMatrix[offset+j] = mIntegralMatrix[offset+j-1] + columnSum[j];
mIntegralMatrixSqr[offset+j] = mIntegralMatrixSqr[offset+j-1] + columnSumSqr[j];
}
}
delete[] columnSum;
delete[] columnSumSqr;
LOGE(“initIntegral end”);
}
2.根据网上抄来的RGB肤色检测计算肤色区域
void MagicBeauty::initSkinMatrix(){
LOGE(“start – initSkinMatrix”);
if(mSkinMatrix == NULL)
mSkinMatrix = new uint8_t[mImageWidth * mImageHeight];
for(int i = 0; i < mImageHeight; i++){
for(int j = 0; j < mImageWidth; j++){
int offset = i*mImageWidth+j;
ARGB RGB;
BitmapOperation::convertIntToArgb(mImageData_rgb[offset],&RGB);
if ((RGB.blue>95 && RGB.green>40 && RGB.red>20 &&
RGB.blue-RGB.red>15 && RGB.blue-RGB.green>15)||//uniform illumination
(RGB.blue>200 && RGB.green>210 && RGB.red>170 &&
abs(RGB.blue-RGB.red)<=15 && RGB.blue>RGB.red&& RGB.green>RGB.red))//lateral illumination
mSkinMatrix[offset] = 255;
else
mSkinMatrix[offset] = 0;
}
}
LOGE(“end – initSkinMatrix”);
}
3.根据公式对RGB通道或者将RGB通道转化为YCbCr格式单独对Y通道进行滤波
void MagicBeauty::startLocalStatisticsSmooth(float sigema){
if(mIntegralMatrix == NULL || mIntegralMatrixSqr == NULL ||
mImageData_yuv_y == NULL || mSkinMatrix == NULL || mImageData_yuv == NULL){
LOGE(“not init correctly”);
return;
}
int radius = mImageWidth > mImageHeight ? mImageWidth * 0.02 : mImageHeight * 0.02;
LOGE(“startSmooth”);
for(int i = 1; i < mImageHeight; i++){
for(int j = 1; j < mImageWidth; j++){
int offset = i * mImageWidth + j;
if(mSkinMatrix[offset] == 255){
int iMax = i + radius >= mImageHeight-1 ? mImageHeight-1 : i + radius;
int jMax = j + radius >= mImageWidth-1 ? mImageWidth-1 :j + radius;
int iMin = i – radius <= 1 ? 1 : i – radius;
int jMin = j – radius <= 1 ? 1 : j – radius;
int squar = (iMax – iMin + 1)*(jMax – jMin + 1);
int i4 = iMax*mImageWidth+jMax;
int i3 = (iMin-1)*mImageWidth+(jMin-1);
int i2 = iMax*mImageWidth+(jMin-1);
int i1 = (iMin-1)*mImageWidth+jMax;
float m = (mIntegralMatrix[i4]
+ mIntegralMatrix[i3]
– mIntegralMatrix[i2]
– mIntegralMatrix[i1]) / squar;
float v = (mIntegralMatrixSqr[i4]
+ mIntegralMatrixSqr[i3]
– mIntegralMatrixSqr[i2]
– mIntegralMatrixSqr[i1]) / squar – m*m;
float k = v / (v + sigema);
mImageData_yuv[offset*3] = m – k * m + k * mImageData_yuv_y[offset];
}
}
}
endLocalStatisticsSmooth();
}
效果图:磨皮强度为最大10.


发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/162997.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
