大家好,又见面了,我是你们的朋友全栈君。
首先来看看什么是点的压缩。
椭圆曲线上的任一仿射点(x, y)(非无穷远点)都可以压缩成利用其y坐标的最后一比特(记为y*)和x坐标来表示,即(x, y*),这就是点的压缩。反过来,利用(x, y*)恢复y坐标,还原仿射点(x, y)的过程就称为点的解压缩。
利用点的压缩可以减少存储和传输时的数据量,但增加了数据处理时间。
代码中用参数point_conversion_form_t来表示是否进行点压缩,point_conversion_form_t的定义如下:
typedef enum {
POINT_CONVERSION_COMPRESSED = 2,
POINT_CONVERSION_UNCOMPRESSED = 4,
POINT_CONVERSION_HYBRID = 6
} point_conversion_form_t;
其中
- POINT_CONVERSION_COMPRESSED 的值为 2,表示采用点压缩。
- POINT_CONVERSION_UNCOMPRESSED的值为4,表示不采用压缩。
- POINT_CONVERSION_HYBRID的值为6,表示混合使用,即既包含点压缩又包含未压缩。
为了节省资源,一般会用一个字节表示压缩形式和y坐标的最后一个字节(必要时)。假设用form来表示压缩形式,则表示压缩形式和y*的字节buf[0]为:

 。 ………(5.16)
。 ………(5.16)
点的压缩很简单,直接用(x, y*)表示即可。但是怎么解压缩该呢,怎么恢复y坐标呢?简而言之,就是利用Weierstrass方程计算平方根。具体过程如下:
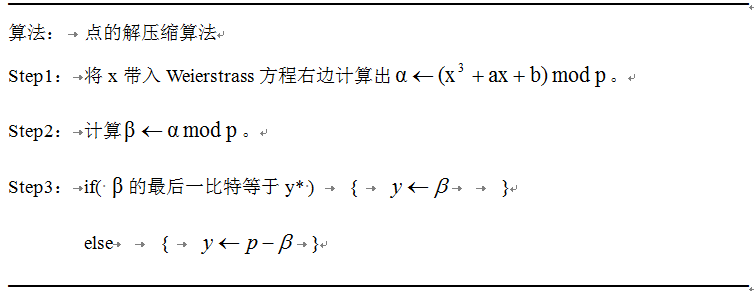
其中,Step2计算可以利用文件bn_sqrt.c中的函数BN_mod_sqrt()实现(函数BIGNUM *BN_mod_sqrt(BIGNUM *in, const BIGNUM *a, const BIGNUM *p)的功能是计算a mod p的平方根)。
利用给定的压缩点(x, y*)来设置点坐标(x, y)的过程其实就是解压缩的过程:
- point->X ← x
- point->Y ← 取x3+ax+b的某一个平方(由y*决定)
- point->Z ← 1
其中y*=1表示y坐标为奇数,y*=0表示y坐标为偶数。
───────────────────────────────────────
int EC_POINT_set_compressed_coordinates_GFp(const EC_GROUP *group, EC_POINT *point, const BIGNUM *x, int y_bit)
功能: 利用压缩点坐标来设置点坐标
输入: group,x【压缩点的x坐标】,int y_bit【y坐标最后一比特】
输出: point【不压缩的点】
返回: 1【正常】or 0【出错】
出处: ec_lib.c
调用: ▼ ec_GFp_simple_set_compressed_coordinates(const EC_GROUP *group, EC_POINT *point, const BIGNUM *x_, int y_bit)
───────────────────────────────────────
代码的处理过程是,先通过解压缩计算出y坐标,然后直接调用设置仿射点坐标的函数EC_POINT_set_affine_coordinates_GFp(group, point, x, y)。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/162142.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
