大家好,又见面了,我是你们的朋友全栈君。
目录
lsim函数:lsim函数是针对线性时不变模型,给定任意输入,得到任意输出。lsim函数表示任意输入函数的响应,连续系统对任意输入函数的响应可以利用lsim函数求取。
语法(常用)
分子分母形式
lsim(num,den,u,t)
传递函数形式
lsim(sys,u,t)
状态空间形式
lsim(A,B,C,D,u,t)
其它形式
lsim(sys,u,t,x0)
lsim(sys,u,t,x0,method)
y=lsim(sys,u,t,x0)
y=lsim(sys,u,t,x0,method)
其中,u为由给定输入序列构成的矩阵,它的每列对应一个输入,每行对应一个新的时间点,其行数与时间t的长度相等,其它的用法与step函数相同。
说明
响应图
lsim(sys,u,t)绘制动态系统模型sys对输入历史记录(t,u)的模拟时间响应。 向量t指定用于仿真的时间样本。 对于单输入系统,输入信号u是与t长度相同的向量。 对于多输入系统,u是一个数组,其行数与时间样本(length(t))一样多,而列数与sys的输入一样多。
lsim(sys,u,t,x0)当sys是状态空间模型时,进一步指定初始状态值的向量x0。
lsim(sys,u,t,x0,method)当sys是连续时间模型时,如何在样本之间插入输入值,method即插入输入值的方法。
响应数据
y=lsim(sys,u,t)返回与输入y同时采样 的系统响应t。对于单输出系统,y是与长度相同的向量t。对于多输出系统, y是一个数组,其中的行与时间样本(length(t))一样多,列与的输出一样多sys。该语法不会生成图。
y=lsim(sys,u,t,x0)当sys是状态空间模型时,进一步指定初始状态值的向量x0。
y=lsim(sys,u,t,x0,method)当sys是连续时间模型时,如何在样本之间插入输入值,method即插入输入值的方法。
示例
示例1
%------------------------------------
H(s)=[
2s^2 + 5s + 1
---------------
s^2 + 2s + 3
s - 1
-----------
s^2 + s + 5
]
%------------------------------------
%%
clc;
clear off;
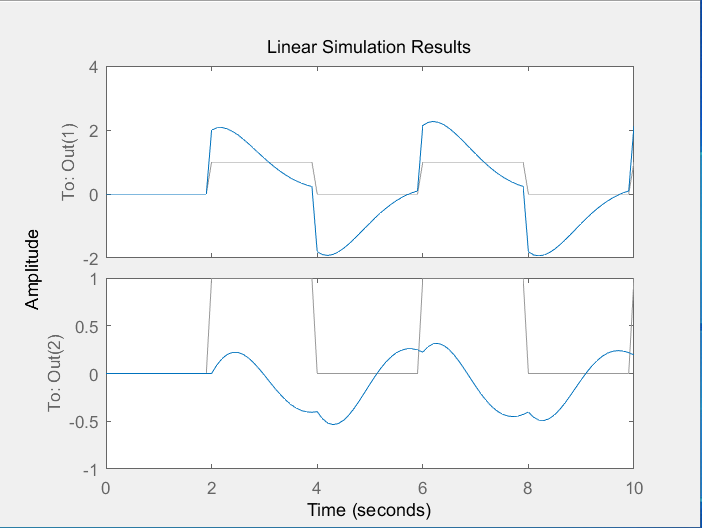
H = [tf([2 5 1],[1 2 3]);tf([1 -1],[1 1 5])];
[u,t] = gensig('square',4,10,0.1);
lsim(H,u,t);
如图所示:

当控制系统为状态空间表示时,则:
A = [-3 -1.5; 5 0];
B = [1; 0];
C = [0.5 1.5];
D = 0;
sys = ss(A,B,C,D);
[u,t] = gensig("square",10,20);
lsim(sys,u,t)
grid on
采用方波输入,响应如图所示:
示例2
如下所示的传递函数:
sys = tf(3,[1 2 3])
sys =
3
-------------
s^2 + 2 s + 3它是一个连续的系统,则:
sys = tf(3,[1 2 3]);
t = 0:0.04:8; % 201 points
u = max(0,min(t-1,1));
lsim(sys,u,t)
grid on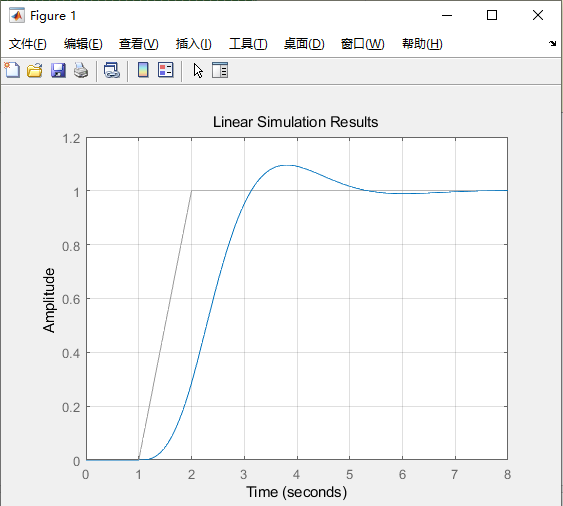
用lsim函数获取模拟的响应数据为:
y = lsim(sys,u,t);
size(y)
ans = 1×2
201 1
向量y包含t相应时间的模拟响应。
示例3
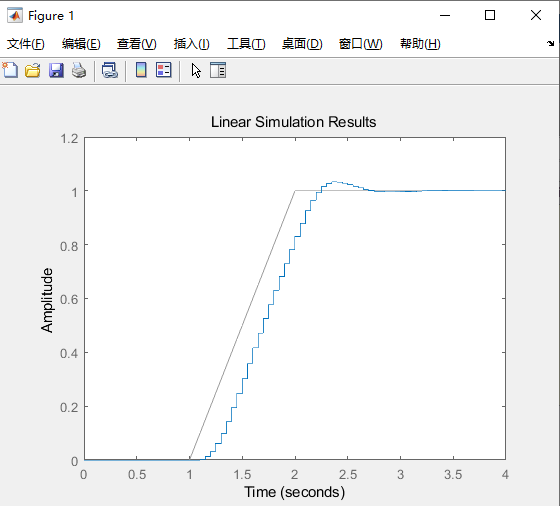
当控制系统为离散型时,且该传递函数的采样时间为0.05 s。使用相同的采样时间来生成时间矢量t和阶跃信号u。如下所示:
sys = tf([0.06 0.05],[1 -1.56 0.67],0.05);
t = 0:0.05:4;
u = max(0,min(t-1,1));
lsim(sys,u,t)如图所示:
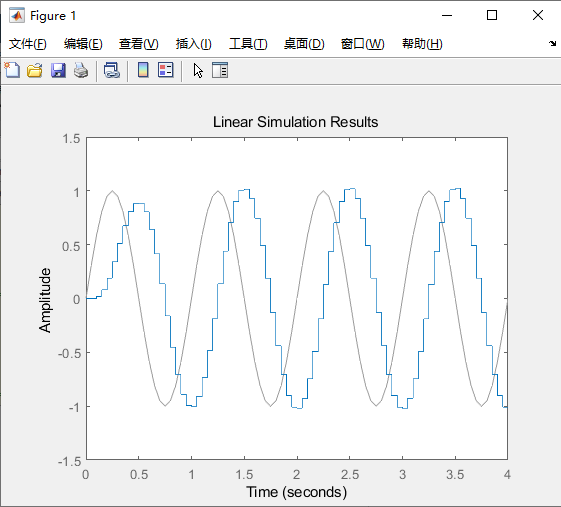
当输入为正弦波时,即模拟系统对周期为1 s,持续时间为4 s的正弦波的响应。,则:
sys = tf([0.06 0.05],[1 -1.56 0.67],0.05);
t = 0:0.05:4;
[u,t] = gensig("sine",1,4,0.05);
lsim(sys,u,t)
其响应如图所示:
示例4
lsim允许在同一轴上绘制多个动态系统的模拟响应。 例如,比较带有PI控制器和PID控制器的系统的闭环响应。 创建系统的传递函数并调整控制器。如下所示:
H = tf(4,[1 10 25]);
C1 = pidtune(H,'PI');
C2 = pidtune(H,'PID');
%形成闭环系统
sys1 = feedback(H*C1,1);
sys2 = feedback(H*C2,1);
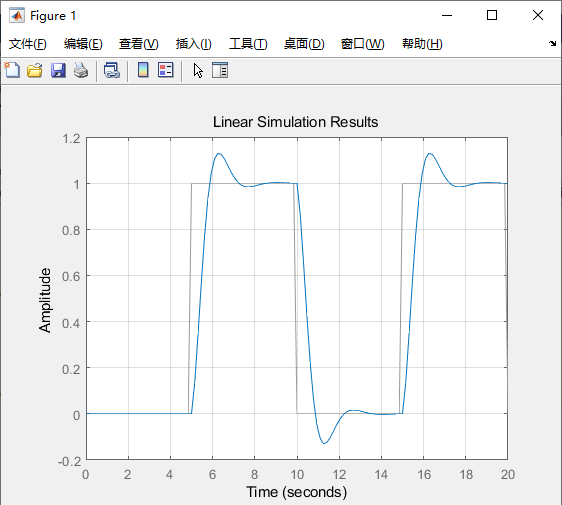
%绘制两个系统对周期为4 s的方波的响应。
[u,t] = gensig("square",4,12);
lsim(sys1,sys2,u,t)
grid on
legend("PI","PID")如图所示:
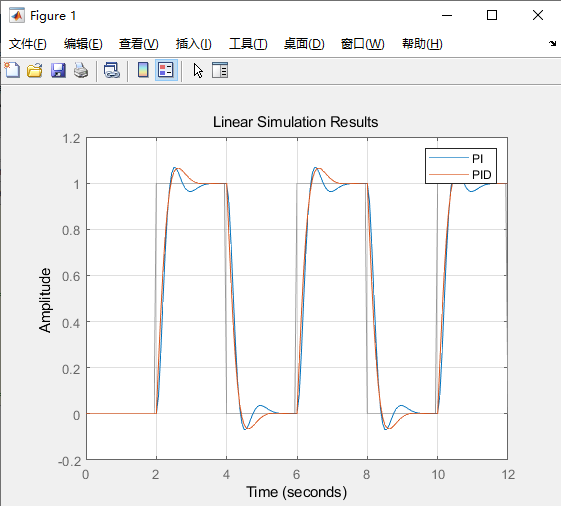
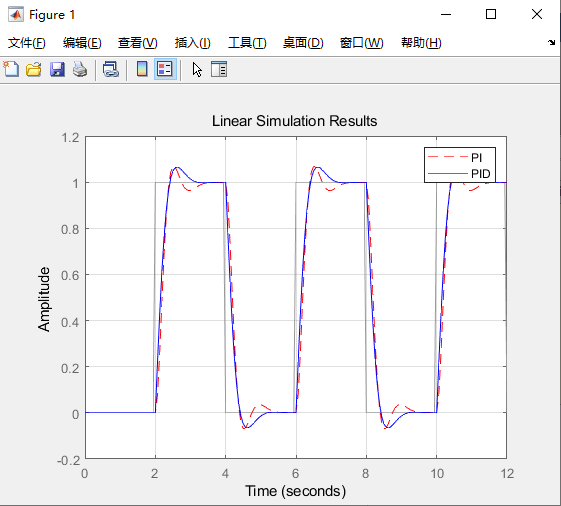
默认情况下,lsim绘制的每个系统选择不同的颜色。 可以使用LineSpec输入参数指定颜色和线条样式。
H = tf(4,[1 10 25]);
C1 = pidtune(H,'PI');
C2 = pidtune(H,'PID');
%形成闭环系统
sys1 = feedback(H*C1,1);
sys2 = feedback(H*C2,1);
%绘制两个系统对周期为4 s的方波的响应。
[u,t] = gensig("square",4,12);
lsim(sys1,"r--",sys2,"b",u,t)
grid on
legend("PI","PID")如图所示:
示例5
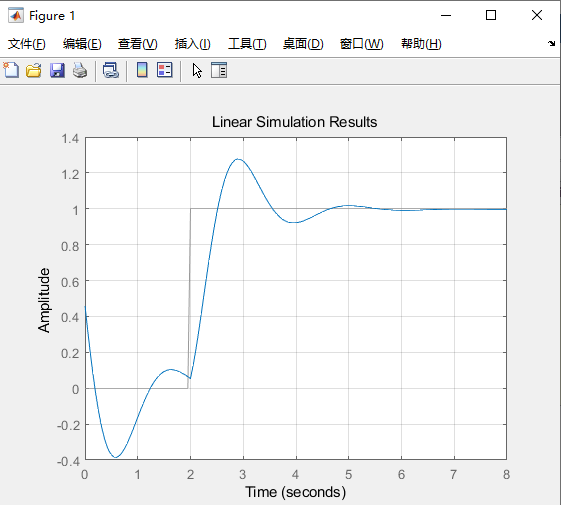
默认情况下,lsim假设在模拟开始时所有状态均为零,从而模拟模型。 模拟状态空间模型的响应时,当使用可选的x0输入参数指定非零初始状态值。 考虑以下两个状态的SISO状态空间模型。
A = [-1.5 -3;
3 -1];
B = [1.3; 0];
C = [1.15 2.3];
D = 0;
sys = ss(A,B,C,D);
x0 = [-0.2 0.3];
t = 0:0.05:8;
u = zeros(length(t),1);
u(t>=2) = 1;
lsim(sys,u,t,x0)
grid on如图所示,图的前半部分显示了系统从初始状态值[-0.2 0.3]的自由演化。 在t = 2时,输入有一个阶跃变化,该图显示了系统从此时的状态值开始对这个新信号的响应:
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/160814.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
