大家好,又见面了,我是你们的朋友全栈君。
写在前面
接上一篇文章,这次是集合了语音识别+语音合成(就是语音播报实现一种反馈)+SG90舵机实现垃圾桶的开与闭,给出上篇文章链接,如果对LD3320语音识别还有问题的朋友可以看看:LD3320语音识别模块与Arduino软串口通讯实现开关灯功能
发现还是有好多人都在做这个,当玩具也好,毕设也好,这个都是一个好玩又有趣的项目。因为这只是现在的一门小课设,就拿来当玩具玩玩,后期看情况会加入WIFI(或者蓝牙?)实现无线通讯,顺便学习一下物联网,用Android Studio开发一个APP就可以实现手机控制。还是一样,这篇文章仅作为参考。如有做得不足或者不对的地方,欢迎一起交流学习。
器件
-
SG90舵机*2(我这只实现2个分类,就可回收垃圾与其他垃圾,道理都一样)
-
LD3320语音识别模块
-
SYN6288语音合成模块
-
Arduino UNO R3 328p
-
小垃圾筒*2 (这里我没用到)
连接
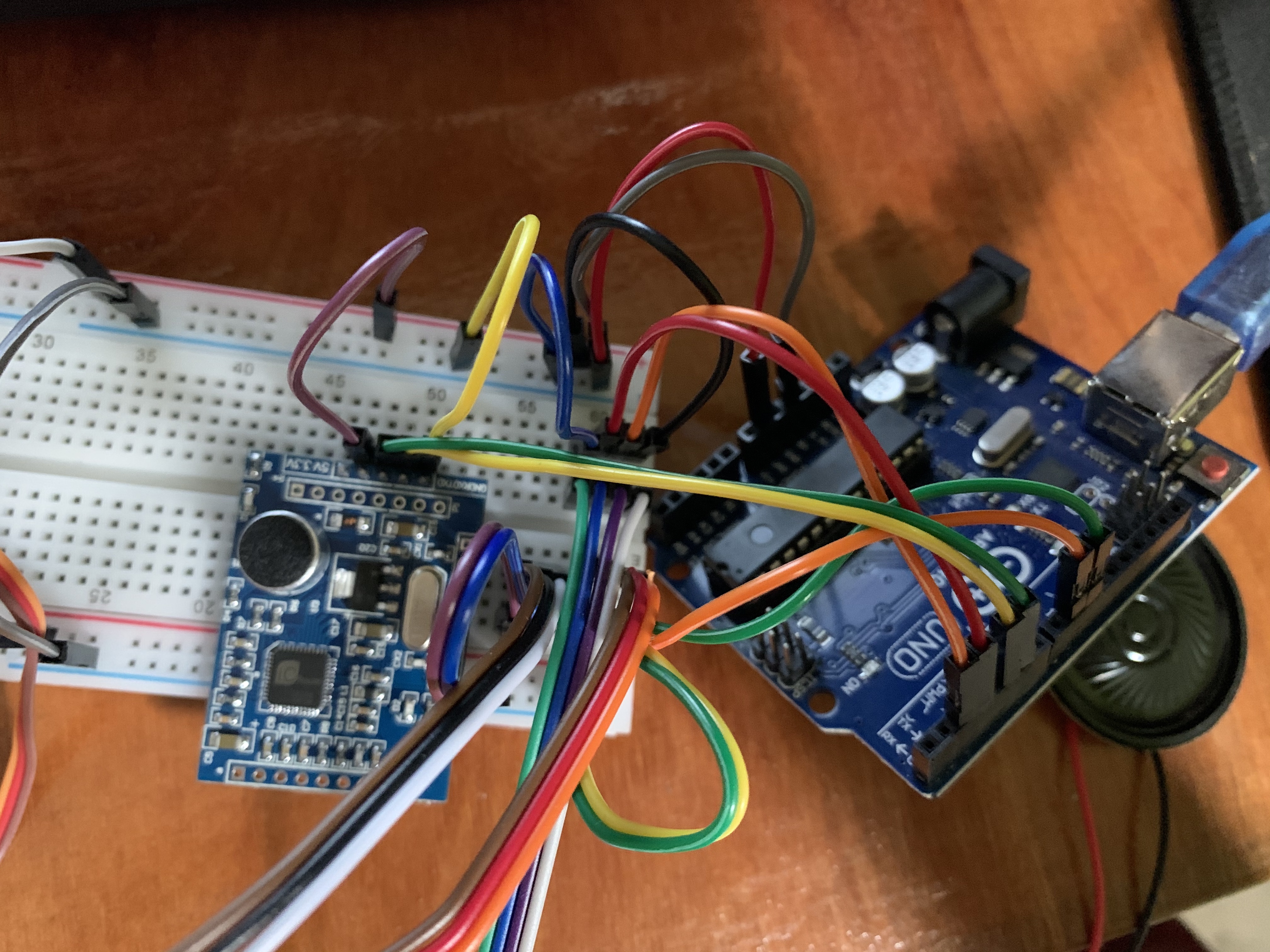

我是这么接,当然这个不是绝对。
| LD3320 | Arduino |
|---|---|
| 5V | 5V |
| GND | GND |
| RXD | D5 |
| TXD | D6 |
| SYN6288 | Arduino |
|---|---|
| 5V | 5V |
| GND | GND |
| RXD | D2 |
| TXD | D3 |
两个舵机,所以
| SG90 | Arduino |
|---|---|
| 红线 | 5V |
| 棕线 | GND |
| 橙线 | D9、D10 |
两个舵机,分别9号跟10号。
部分代码
LD3320可以通过串口与产品中的单片机进行串口通信达到控制效果,如采用这种方式进行控制,用户可以对main.c函数中的处理函数进行修改,将输出的信息更改为输出识别码,那么在每次识别成功后串口都将打印输出对应的识别码,产品中的单片机就可以对该识别码进行操作以达到控制效果。
给出LD3320模块的原理图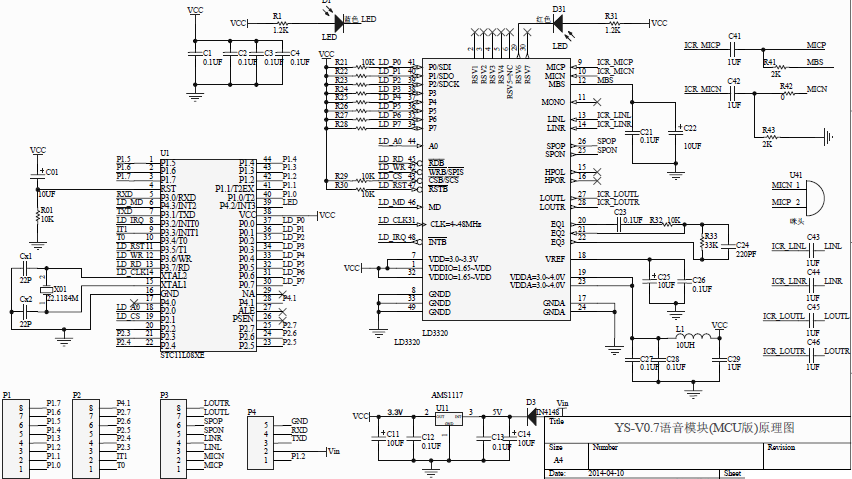
厂家给的文件:
LDChip.c
uint8 LD_AsrAddFixed()
{
uint8 k, flag;
uint8 nAsrAddLength;
#define DATE_A 11 /*数组二维数值*/
#define DATE_B 20 /*数组一维数值*/
uint8 code sRecog[DATE_A][DATE_B] =
{
"la ji tong",\ //一级口令设为“垃圾桶”
"fei zhi",\
"su liao",\
"bo li",\
"yi la guan",\
"bao zhi",\
"yi wu",\
"wei sheng zhi",\
"guo ke",\
"luo ye",\
"chen tu"
}; /*添加关键词,用户修改*/
uint8 code pCode[DATE_A] =
{
CODE_CMD,\
CODE_1,\
CODE_2,\
CODE_3,\
CODE_4,\
CODE_5,\
CODE_6,\
CODE_7,\
CODE_8,\
CODE_9,\
CODE_10
}; /*添加识别码,用户修改*/
..........
文件:main.c
void User_handle(uint8 dat)
{
if(0==dat)
{
G0_flag=ENABLE;
UARTSendByte(0x01); //将识别到的识别码传到串口输出,以下同理
PrintCom("1/r/n");
LED=0;
}
else if(ENABLE==G0_flag)
{
G0_flag=DISABLE;
LED=1;
switch(dat)
{
case CODE_1:
UARTSendByte(0x02);
PrintCom("2/r/n");
SRD1 = 1;
break;
case CODE_2:
UARTSendByte(0x02);
PrintCom("2/r/n");
SRD1 = 0;
break;
...........
给出SYN6288原理图:
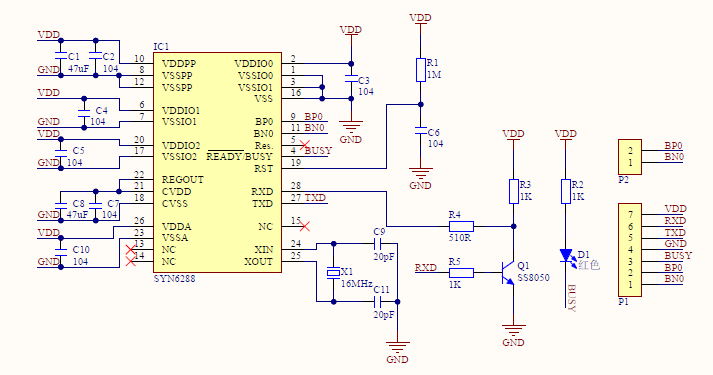
关于SYN6288得多说几句,主控制器和SYN6288语音合成芯片之间通过UART接口连接,控制器可通过通讯接口向SYN6288语音合成芯片发送控制命令和文本,SYN6288语音合成芯片把接收到的文本合成为语音信号输出,输出的信号经功率放大器进行放大后连接到喇叭进行播放。
使用之前得要把发送的文本转换文本编码格式

我们与这个芯片“对话”用的不是中文,得首先把中文转换它才能“念出来”,网上有很多这些转换的方法,这里就不再纂述。
Arduino代码
#include <Servo.h> //调用这个库,控制舵机的
#include <SoftwareSerial.h> //定义软串口的
SoftwareSerial softSerial1(6,5); //6为RX,5为TX
SoftwareSerial softSerial2(3,2); //3为RX,5为TX
Servo myservo1; // 定义舵机一
Servo myservo2; // 定义舵机二
int a;
void speech1(){
//播放:提示音msgd
unsigned char i = 0;
unsigned char head[10];
head[0] = 0xFD;
head[1] = 0x00;
head[2] = 0x07;
head[3] = 0x01;
head[4] = 0x00;
head[5] = 0x6D;
head[6] = 0x73;
head[7] = 0x67;
head[8] = 0x64;
head[9] = 0xE6;
for(i=0; i<10; i++){
softSerial2.write(head[i]);
}
}
void speech2(){
//播放:可回收垃圾
unsigned char j = 0;
unsigned char head1[16];
head1[0] = 0xFD;
head1[1] = 0x00;
head1[2] = 0x0D;
head1[3] = 0x01;
head1[4] = 0x00;
head1[5] = 0xBF;
head1[6] = 0xC9;
head1[7] = 0xBB;
head1[8] = 0xD8;
head1[9] = 0xCA;
head1[10] = 0xD5;
head1[11] = 0xC0;
head1[12] = 0xAC;
head1[13] = 0xBB;
head1[14] = 0xF8;
head1[15] = 0xD4;
for(j=0; j<16; j++){
softSerial2.write(head1[j]);
}
}
void speech3(){
//播放:其他垃圾
unsigned char k = 0;
unsigned char head2[14];
head2[0] = 0xFD;
head2[1] = 0x00;
head2[2] = 0x0B;
head2[3] = 0x01;
head2[4] = 0x00;
head2[5] = 0xC6;
head2[6] = 0xE4;
head2[7] = 0xCB;
head2[8] = 0xFB;
head2[9] = 0xC0;
head2[10] = 0xAC;
head2[11] = 0xBB;
head2[12] = 0xF8;
head2[13] = 0xCA;
for(k=0; k<14; k++){
softSerial2.write(head2[k]);
}
}
void setup() {
myservo1.attach(9); // D9为舵机一信号口
myservo2.attach(10); // D10为舵机二信号口
Serial.begin(9600); //串口初始化
softSerial1.begin(9600);
softSerial2.begin(9600);
}
void loop() {
softSerial1.listen(); //监听第一个串口
a=softSerial1.read(); //读取串口1的值
switch(a)
{
case 1:
speech1(); //播放提示音
break;
case 2:
speech2(); //识别到是可回收垃圾,并播报出来
delay(1000);
myservo1.write(90); //舵机一旋转90°
delay(3000); //延迟一段时间,也就是扔垃圾的时间
myservo1.write(0);
delay(5); //给舵机一个转动的时间
break;
case 3:
speech3();
delay(1000); //识别到是其他垃圾,并播报出来
myservo2.write(90); //舵机二旋转90°
delay(3000);
myservo2.write(0);
delay(5);
break;
default:
break;
}
}
关于softSerial1.listen(); 要说几句,之前一直发现一个问题,就是我在用着两个软串口进行通讯,发现语音播报的功能就显示不出来,但是我分着来用,却可以实现,这里提出串口监听的方法,按我的目前的理解就是,只运行第一个软串口,即语音识别模块的串口通讯,这样程序就能完好的运行了。
运行结果
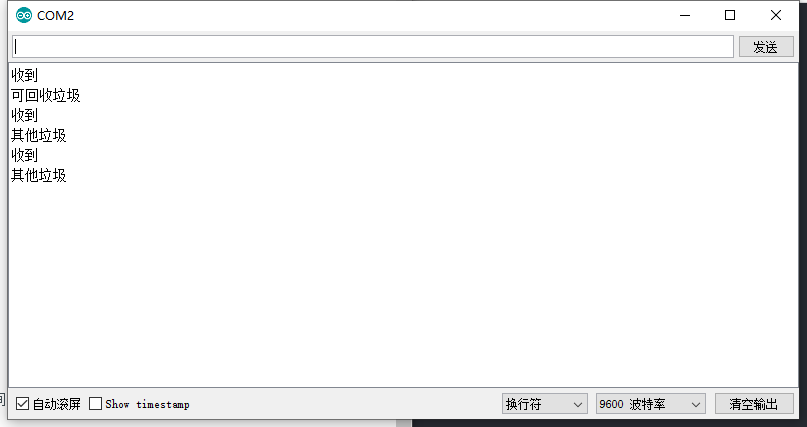
因为这里不能直接上传视频,总的来说是可以正常运行的了,-.-
那我就用串口监视器来说明吧
小结
(估计也没人看总结)总的来说,基本的功能已经实现了,接下来就是提升或者想想怎么提高识别率以及增加几句“垃圾语”,因为目前时不时还是会乱识别到不该识别到的对话。用Arduino控制舵机就几句代码就可以实现,这比STM32或者51方便好多好多。
这是玩具,这是玩具,这是玩具。 文章中肯定有很多不足的地方,有很多交代不来的东西,我说怎么做这东西的人很多,但是在CSDN上没有,可能就是很多东西不知道怎么用语言表达。
希望能帮到做这个项目方向的朋友,也希望能帮到偶然点进来的朋友。
完整代码:点击下载
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/153158.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
