大家好,又见面了,我是你们的朋友全栈君。
论文题目:YOLOv3: An Incremental Improvement
论文地址:https://arxiv.org/abs/1804.02767
代码地址:https://github.com/aloyschen/tensorflow-yolo3
一、论文解读
1、bounding box prediction(边界框预测)
YOLO2预测bounding boxes是使用anchor boxes,这个网络为每个bounding box预测了4个坐标:tx、ty、tw、th,用(cx,cy)表示当前网格左上角坐标偏移图像左上角坐标的距离,用pw,ph表示先验框(piror)的宽和高,可以得到下面式子:


在训练期间,使用平方和误差(sum of squared error loss)。真值用 表示,梯度就是真值减去预测值:。
表示,梯度就是真值减去预测值:。
YOLO3用logistic regression为每个bounding box预测一个分数。算法只为每个真值匹配一个最优的先验框。
2、多标签预测
每个bounding box可能含有多类物体,也就是多标签预测。所以用logistic(sigmoid)代替softmax,因为softmax表示每个框只有一类对象,而sigmoid可以预测多标签分类。那么如何用sigmoid来做多标签分类呢?其实就是针对logits中每个分类计算的结果分别作用一个sigmoid分类器,分别判定样本是否属于某个类别。在训练期间,使用二元交叉熵损失函数进行类别预测。
sigmoid多标签预测参考博客:https://blog.csdn.net/qq_32172681/article/details/97936956。
3、结合不同卷积层的特征,提取更细粒度的信息,做多尺度预测
YOLO3用3个不同的尺度预测boxes,网络采用类似特征金字塔的概念,从不同的尺度提取特征。在原先的基本特征提取器上新增了几个卷积层,最后用一个3维的张量表示bounding box、objectness和class predictions。在COCO中,在每个尺度上预测3个boxes,因此张量为N*N*[3*(4+1+80)],分别对应4个bounding boxes、1个objectness prediction和80个class predictions。接下来,从前面的两个图层中提取特征图,并将其向上采样2倍。从早期的网络中获取一个特征图,并使用串联将其与上采样特征合并。这种方法允许我们从上采样的特性中获得更有意义的语义信息,并从早期的特性图中获得更细粒度的信息。然后再添加一些卷积层来处理这个组合的特征图,并最终预测一个类似的张量,尽管现在的大小是原来的两倍。再次执行相同的设计,以预测最终框的尺寸。在过去,YOLO难以预测小的物体,现在通过多尺度预测,明显改善。
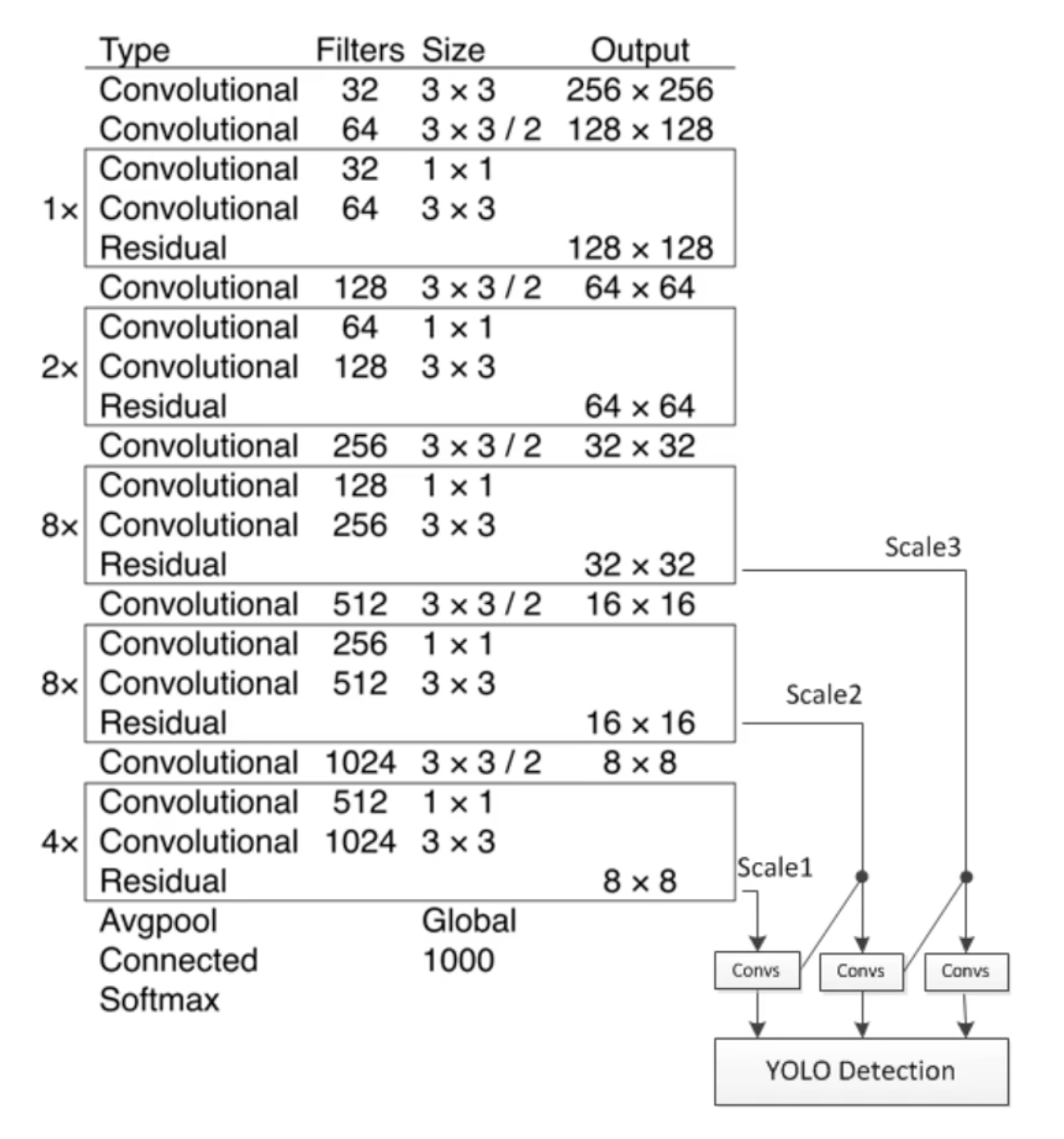
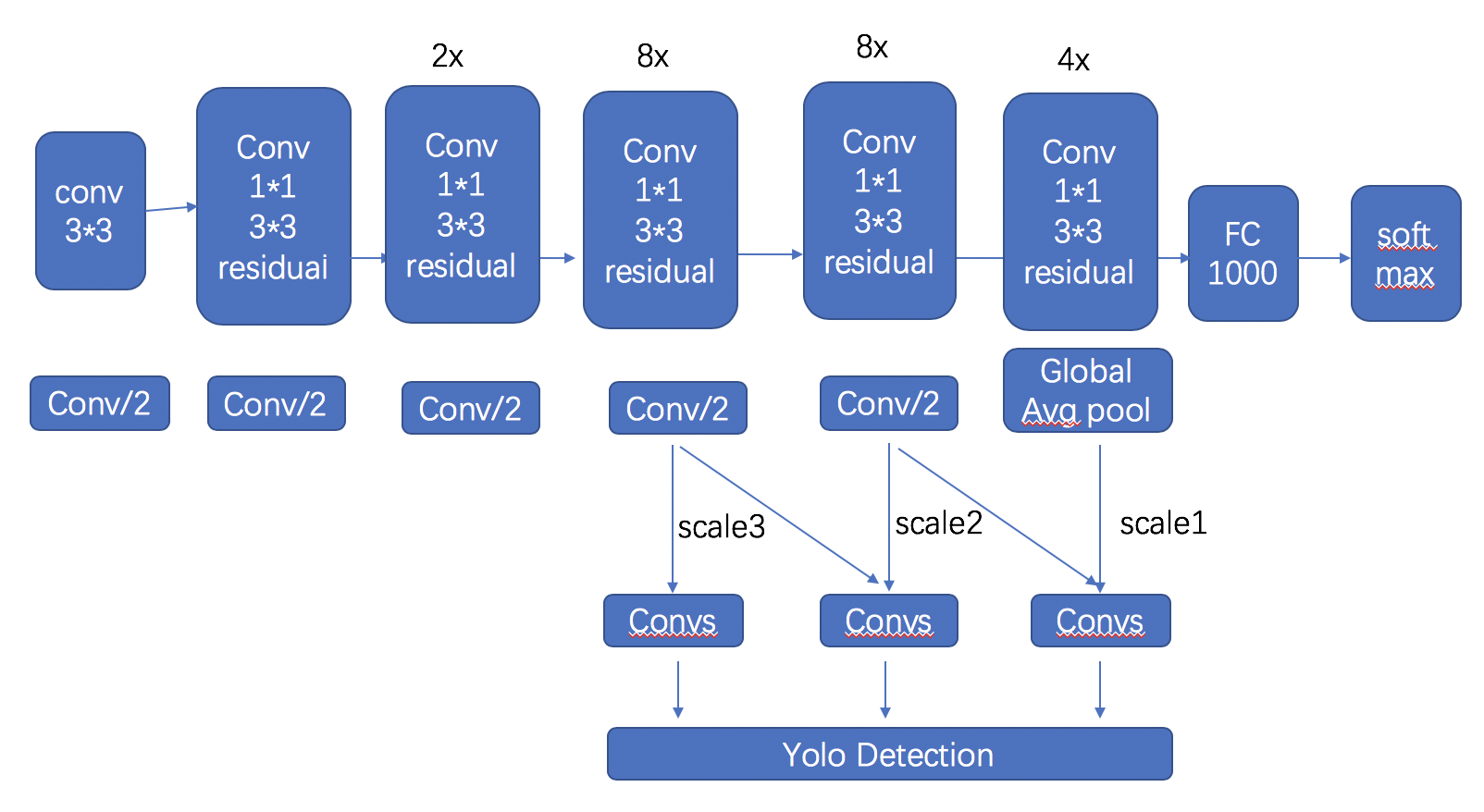
4、网络结构(DarkNet53 = Darknet19 + ResNet)
- 结合残差思想,提取更深层次的语义信息。
- 仍然使用连续的3×3和1×1的卷积层。
- 通过上采样对三个不同尺度做预测。如将8*8的特征图上采样和16*16的特征图相加再次计算,这样可以预测出更小的物体。
- 采用了步长为2的卷积层代替pooling层,因为池化层会丢失信息。
如图所示:
5、预测更多目标
YOLO3仍然使用k-均值聚类来确定模板框,为每个网格预测9个bounding boxes(YOLO2只有5个、YOLO1只有2个),这样可以提高recall。
6、损失函数
在训练期间,使用二元交叉熵损失函数进行类别预测。YOLO v2损失函数的后三项是平方误差,而YOLO v3则更改为交叉熵误差项,也就是说YOLO v3的物品置信度和分离预测使用的是逻辑回归算法。
二、代码理解
1、构造残差块
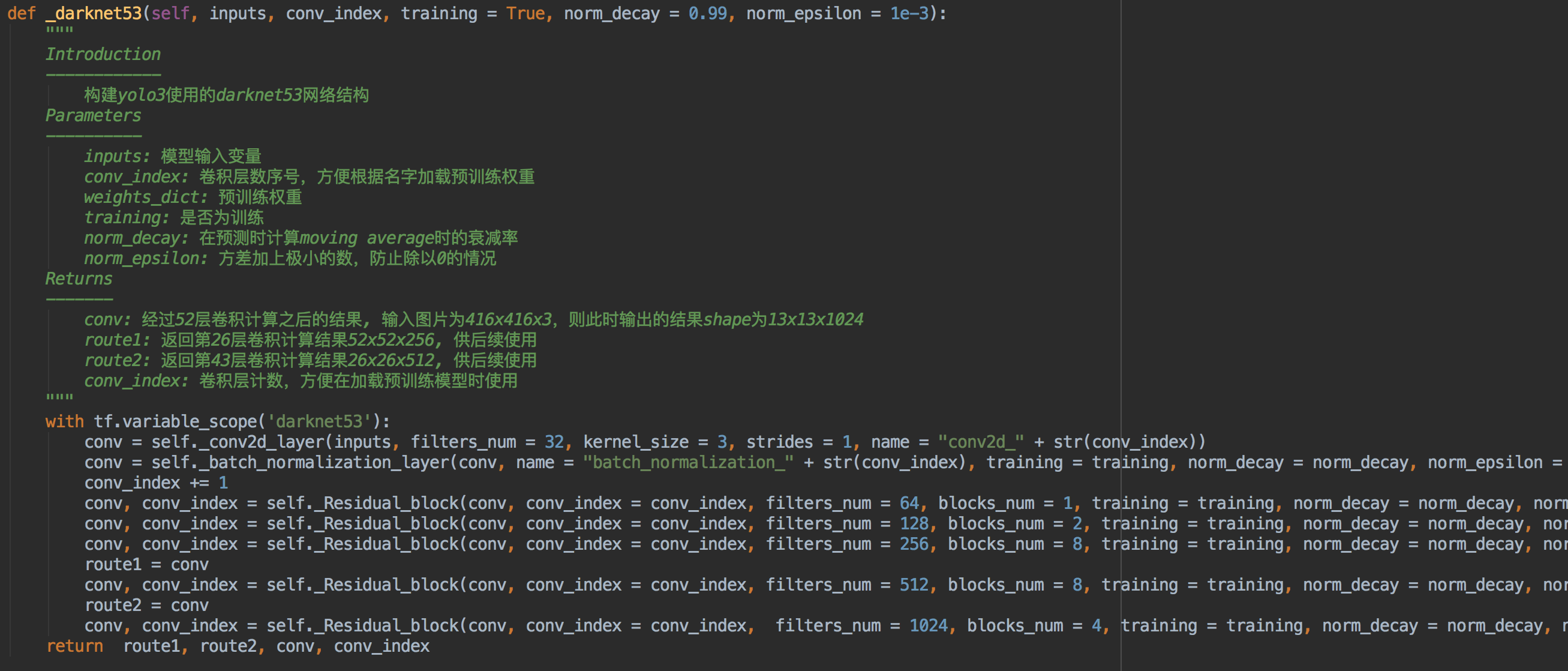
2、darknet53网络结构,用于提取特征(使用了残差块)
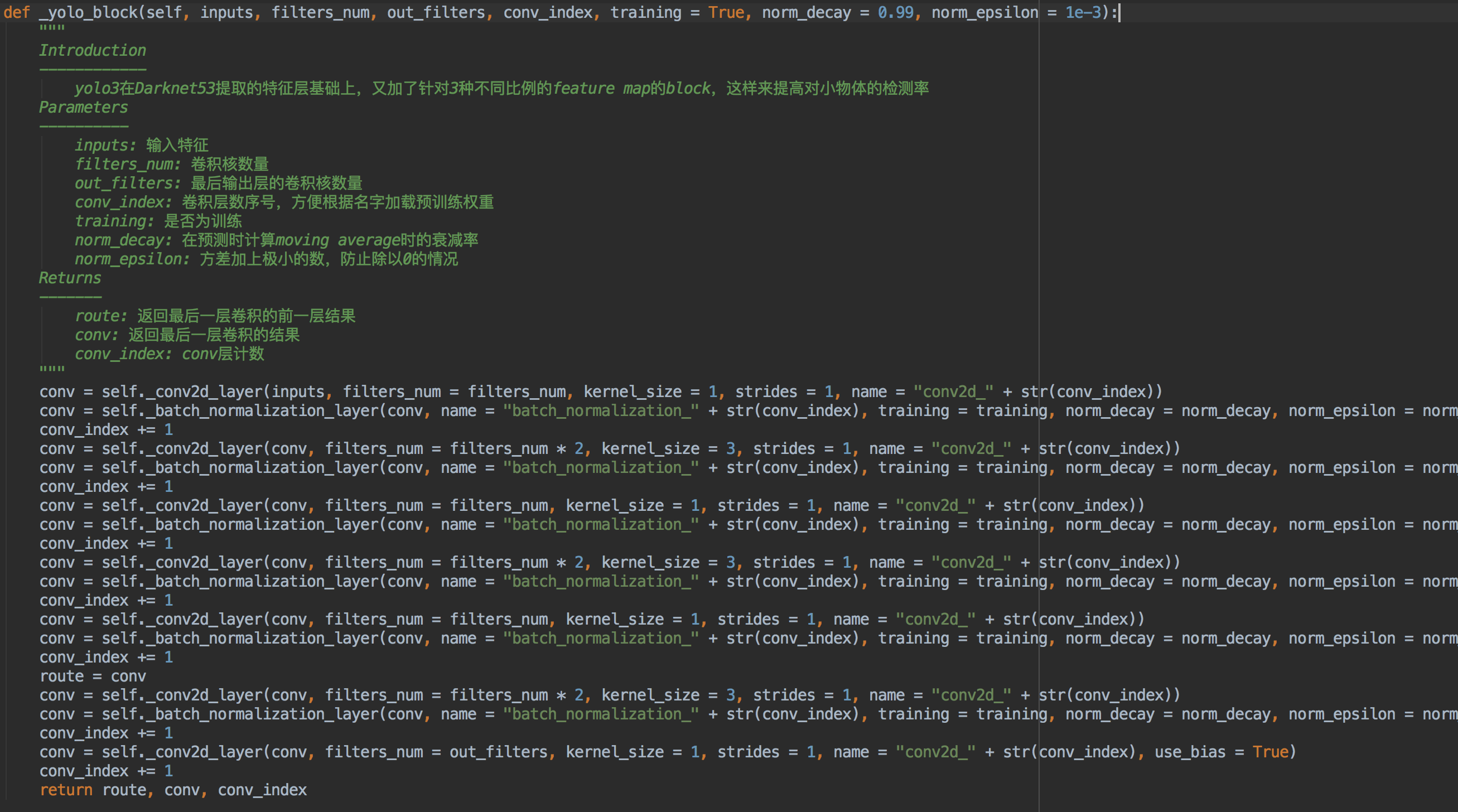
3、yolo块(图中Convs)
yolo3在Darknet53提取的特征层基础上,又加了针对3种不同比例的feature map的block,这样来提高对小物体的检测率
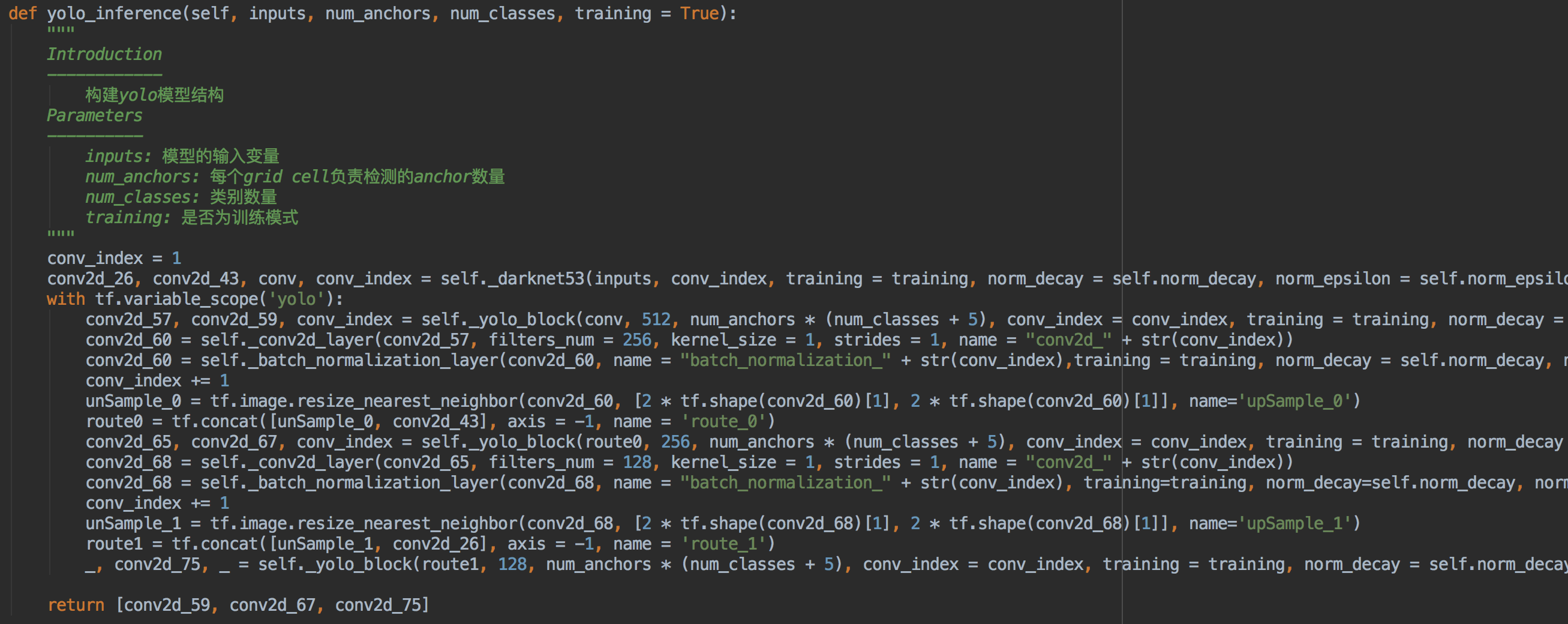
4、构造yolo3模型结构,输出三种尺度的卷积层(conv2d_59, conv2d_67, conv2d_75)
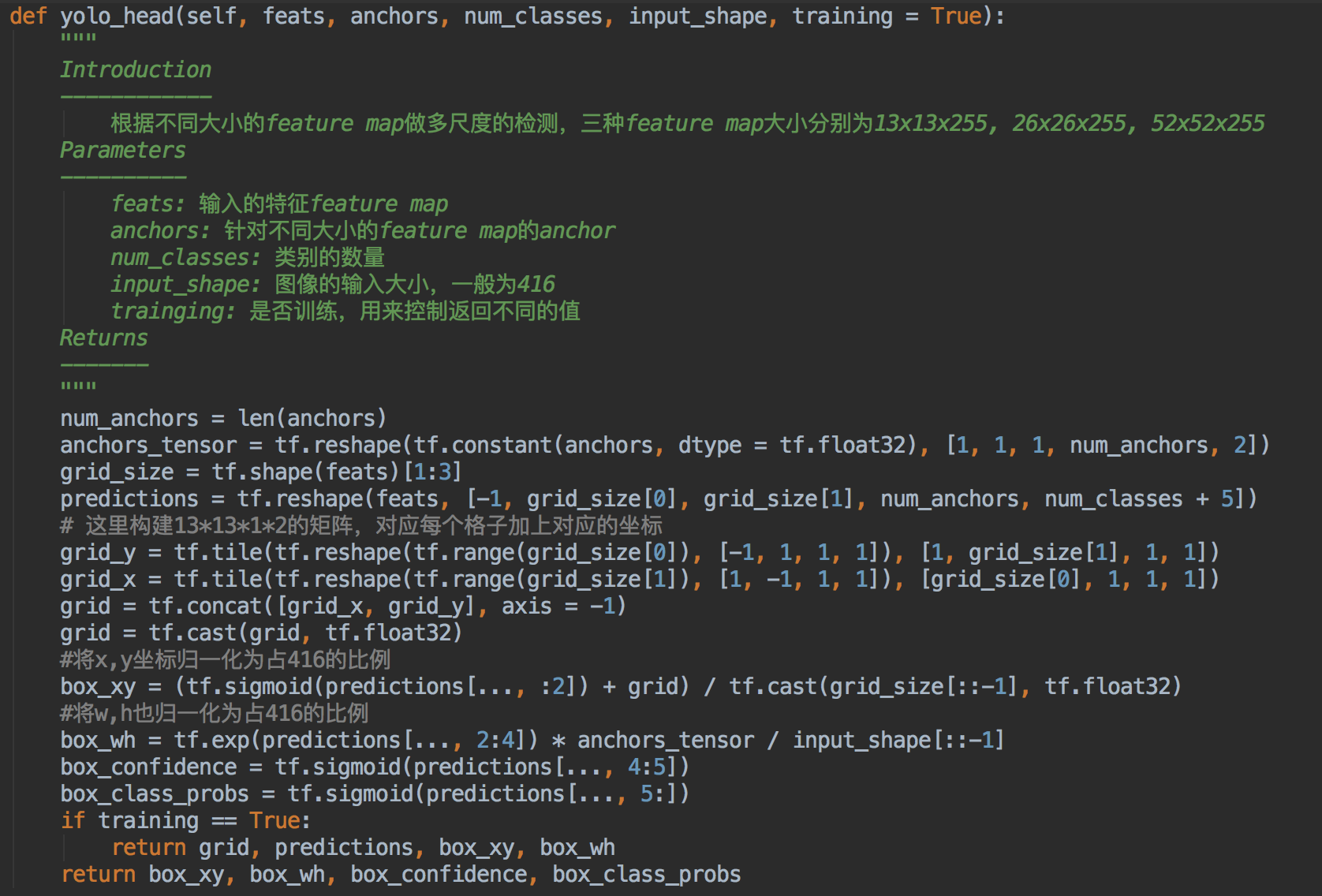
5、目标检测模块,输出预测结果x,y,w,h,confidence,class_prob
根据不同大小的feature map做多尺度的检测(三种feature map大小分别为13x13x255, 26x26x255, 52x52x255)
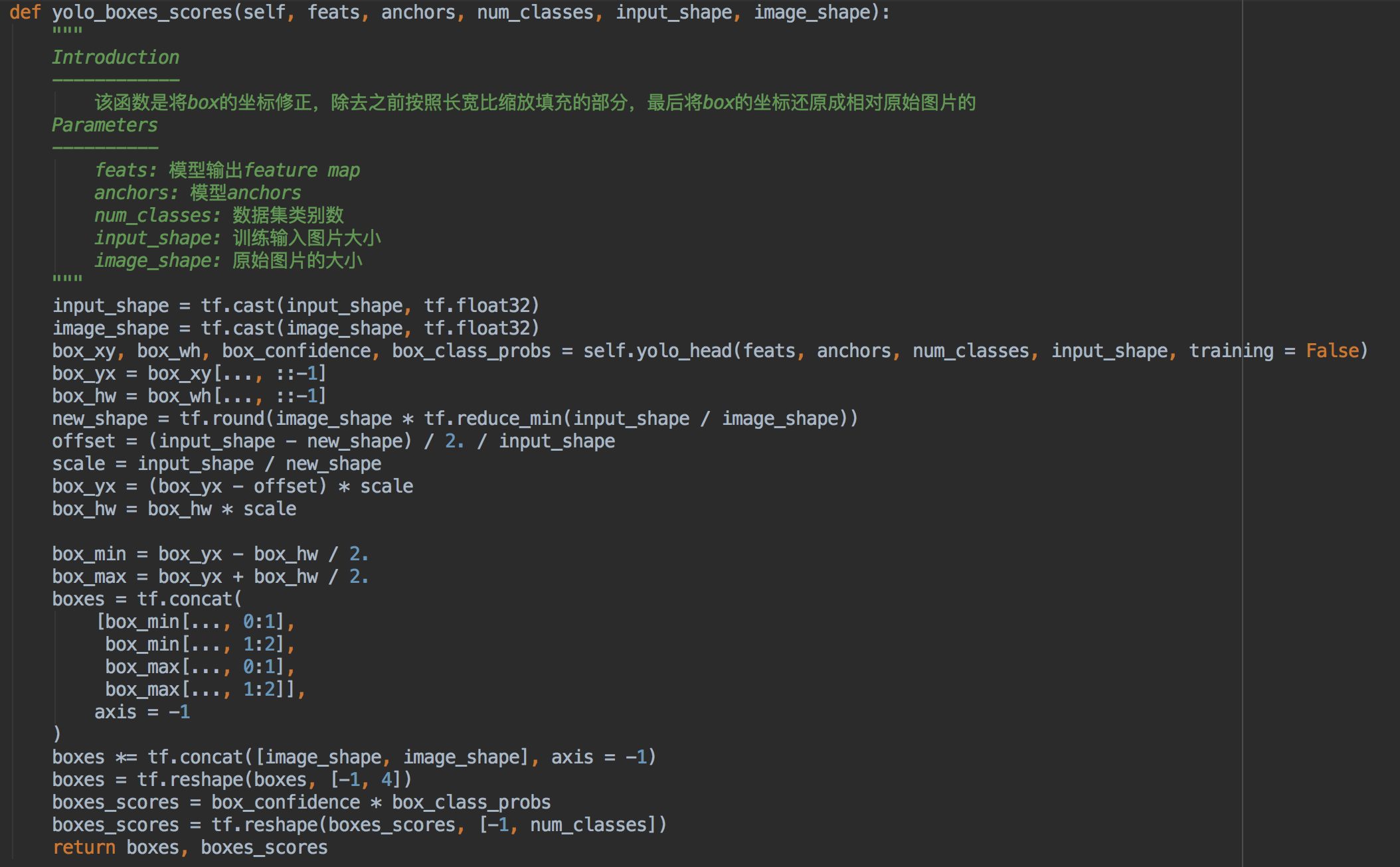
6、之前输入图像时,按照长宽比缩放,对图像进行了填充,此处对box的坐标进行修正
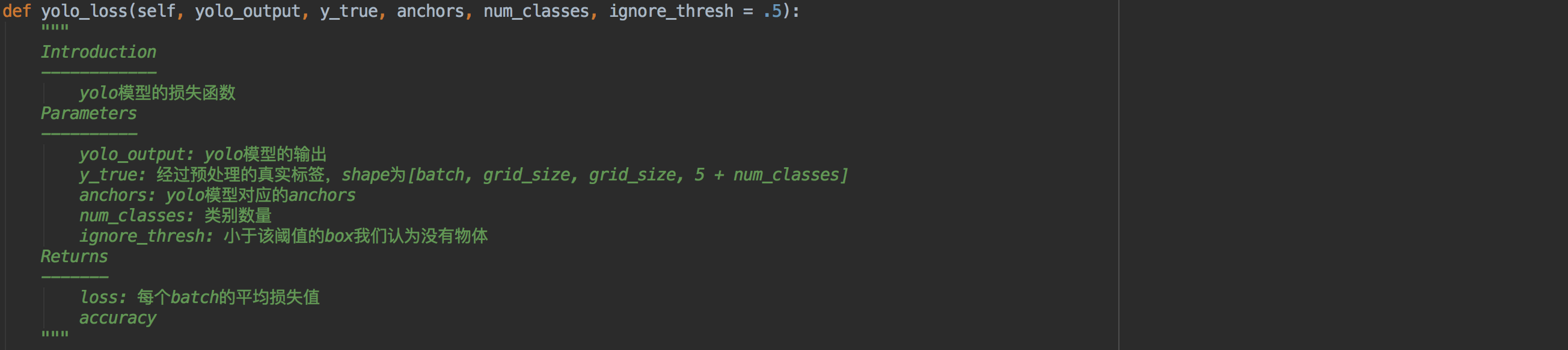
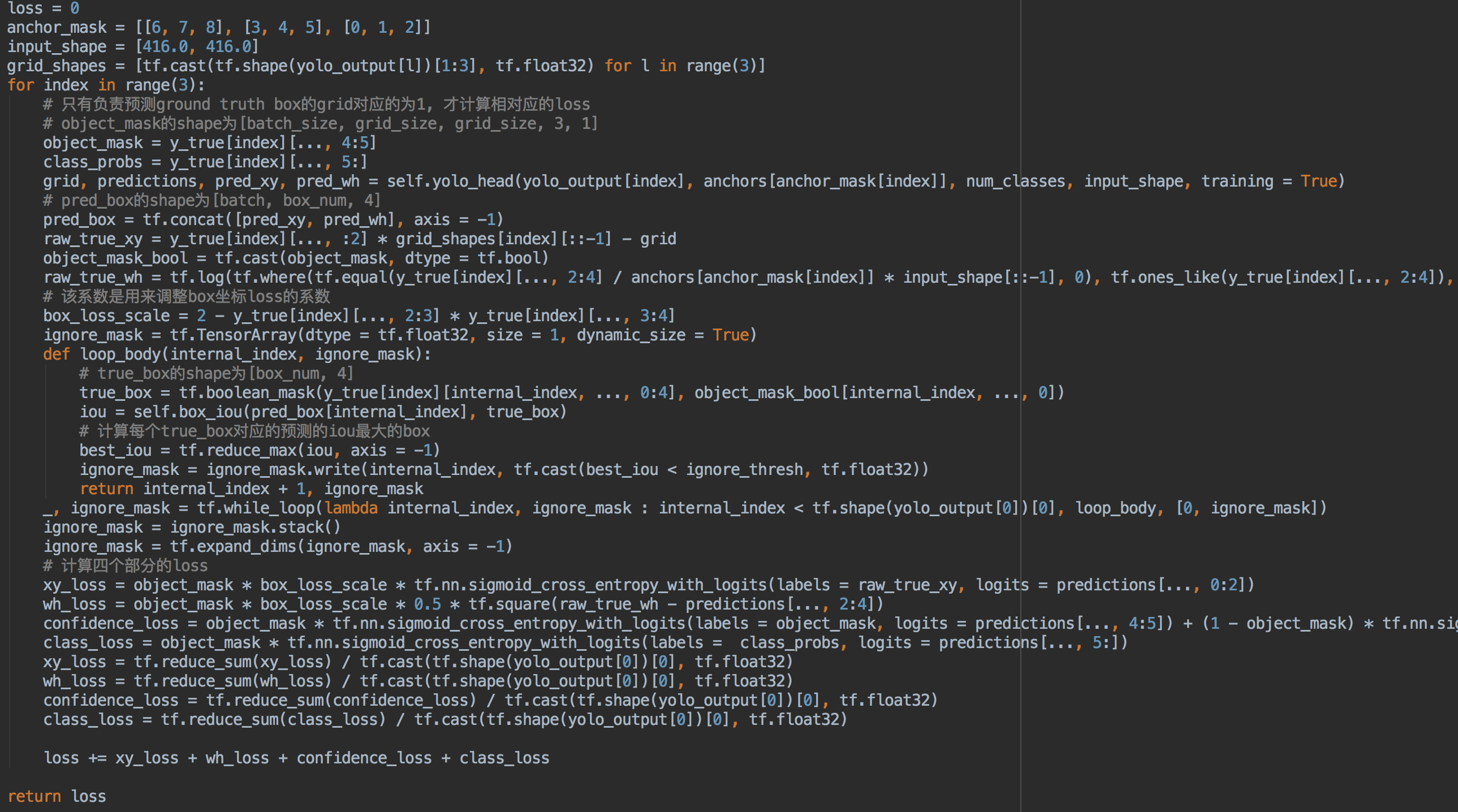
7、损失函数(共4部分:框位置xy,wh,置信度confidence,类别class)
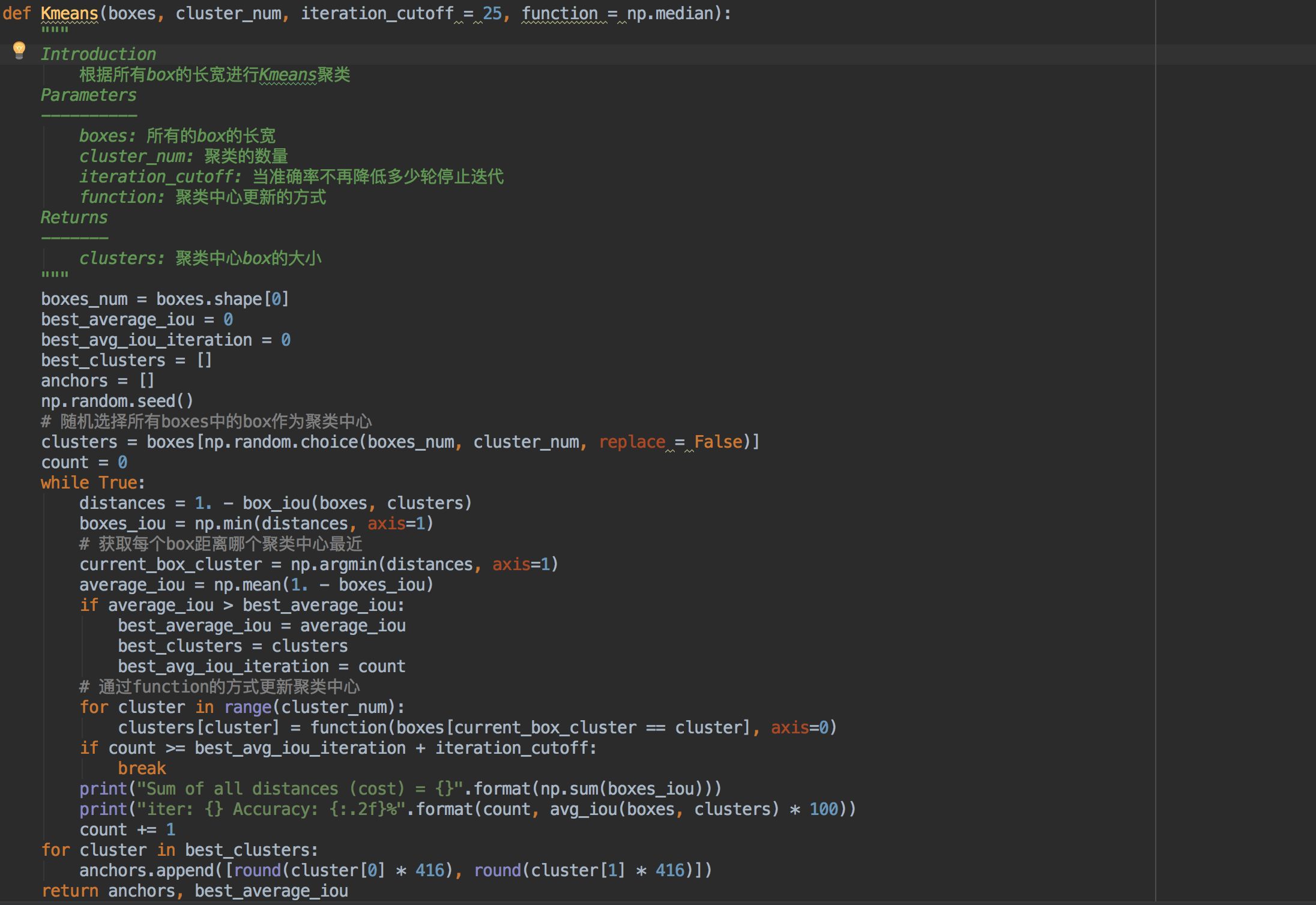
8、k-mean聚类算法(用于生成模版框)
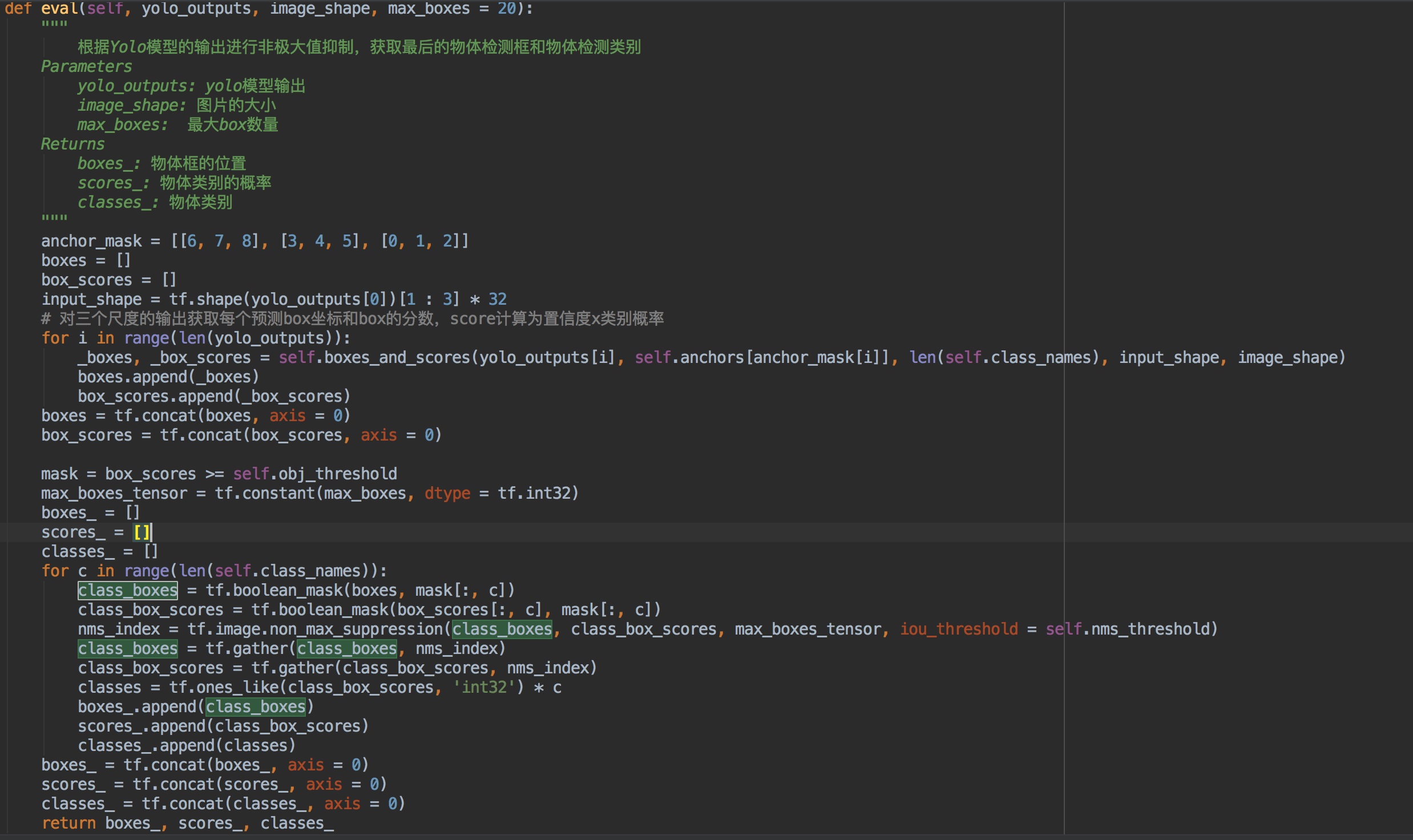
9、对三个不同尺度的输出做非极大值抑制,得到最后物体检测框和预测类别
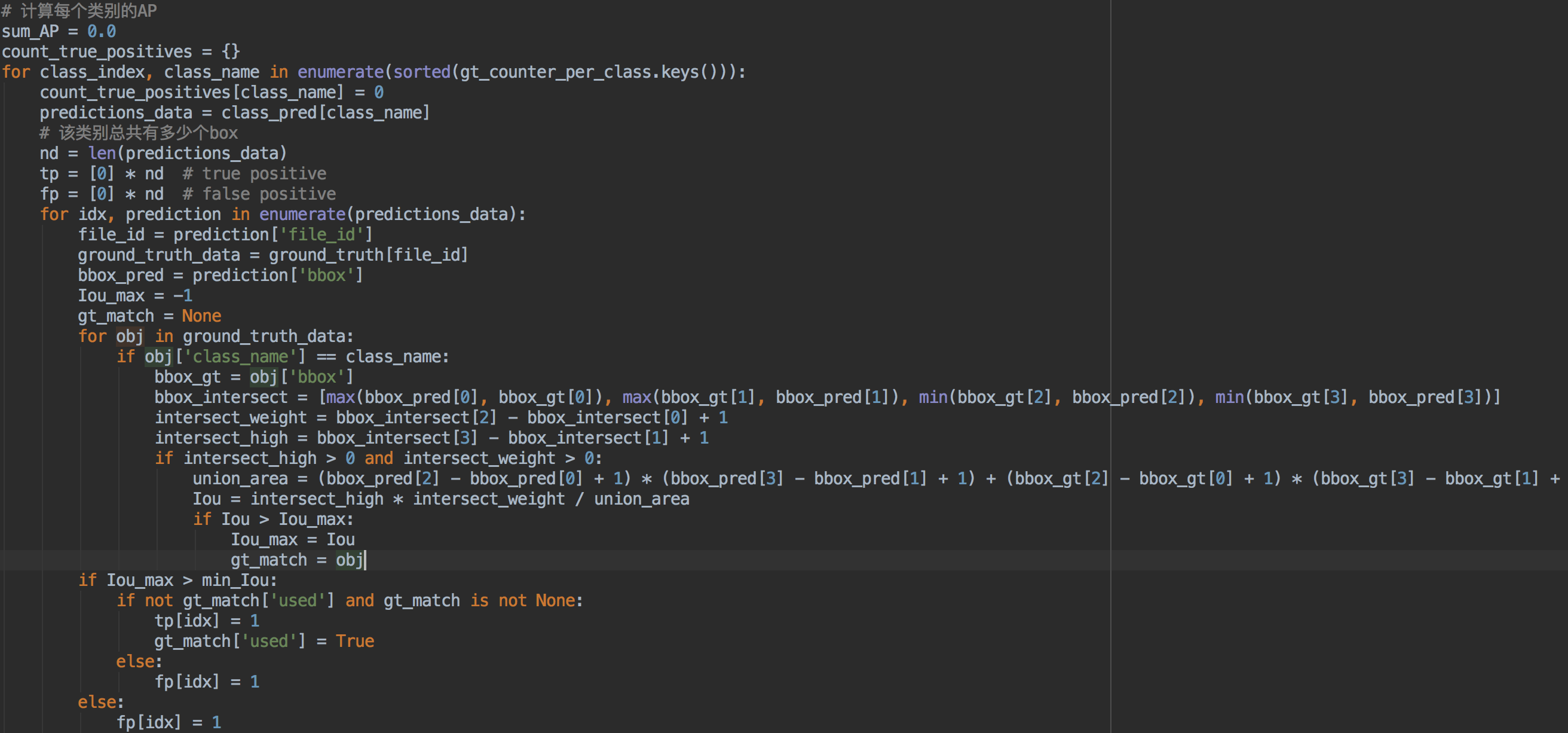
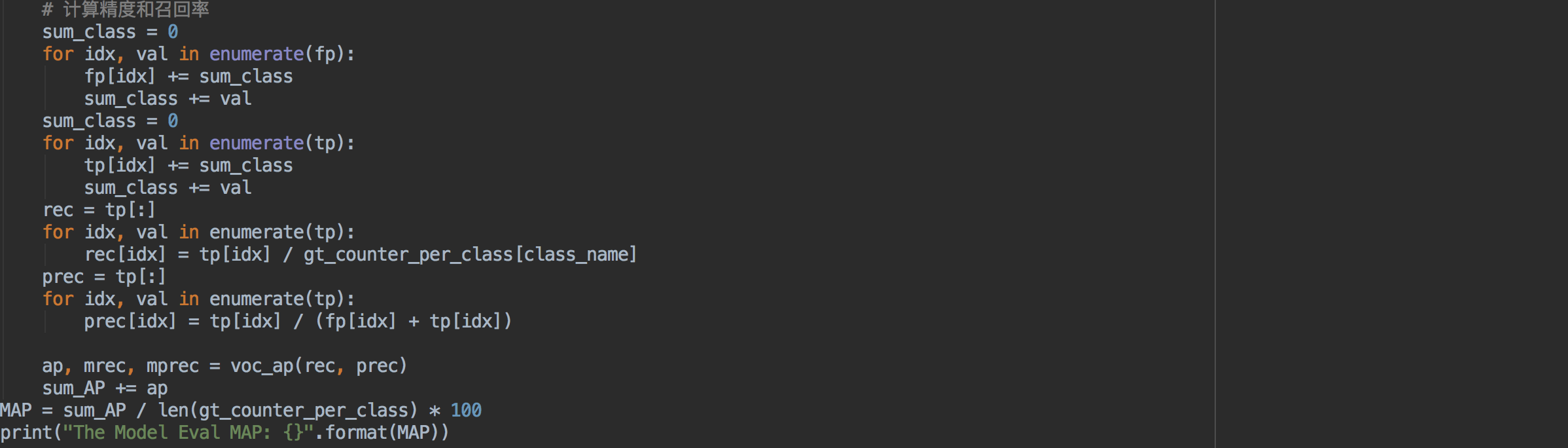
10、计算mAP,评价模型
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/150540.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
