大家好,又见面了,我是你们的朋友全栈君。
RDN(由残差密集网络实现的图像超分辨率)
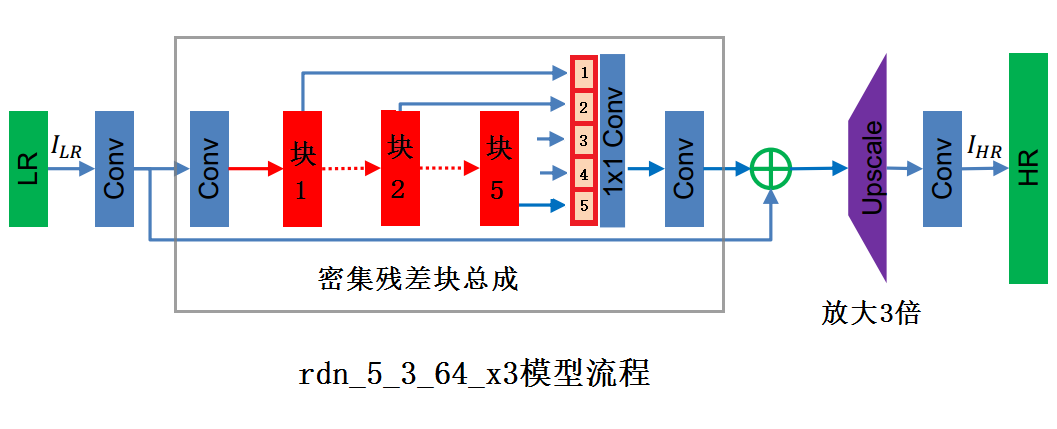
在《RDN-TensorFlow-master》有一个3倍模型(也只有这一个了):rdn_5_3_64_x3
这里用C++实现这个的3倍重建:
流程图:

密集残差块:
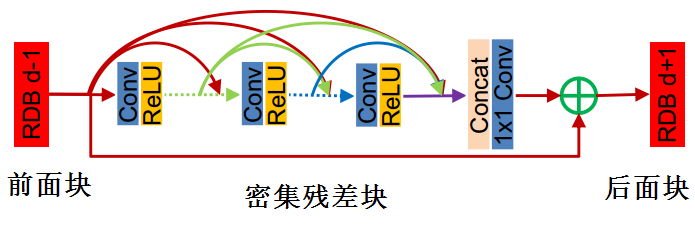
这个残差块结构内部和前面的ESRGAN(前面的文章)中的密集残差块是一样的,只是外部有点不同。
定义密集残差块:
struct 密集残差块 // 4个卷积层
{
//输入 0; -->64
//0 连续存储 64
层数据 * conv1;//64-->64
//0,1 连续存储 128
层数据 * conv2;//128-->64
//0,1,2 连续存储 192
层数据 * conv3;//192-->64
//0,1,2,3 连续存储 256
层数据 * conv4;//256-->64 局部特征融合 1x1卷积
};
定义模型数据池和初始化:
struct RDN模型
{
//浅层特征提取
层数据 * conv1;//3->64
层数据 * conv2;//64->64
//密集残差块
int 密集残差块数量;//5块
密集残差块 * 块;
//5个密集残差块连续存储 320
层数据 * conv3; //320-->64 特征融合 1x1卷积
层数据 * conv4; //64-->64
//全局残差相加
//放大
层数据 * up1;//64->64 卷积
层数据 * up2;//64->32 卷积
层数据 * up3;//32->27 卷积
//亚像素卷积 27->3
//输出
层数据 * out;//3->3 卷积
//构造函数
RDN模型();
};
RDN模型::RDN模型()
{
int size;
层数据 * 层;
//用于一层(宏)
/*输入维度,输出维度,核宽*/
/*输入维度,输出维度,核宽*/
#define 初始化ONE层(IN,OUT,KW) \
\
层->输入维度=IN;\
层->输出维度=OUT;\
层->核宽=KW;\
层->权重长度=层->输出维度*层->输入维度*层->核宽*层->核宽;\
层->权重_数据=(float*)malloc(sizeof(float) * 层->权重长度);\
层->偏移长度=层->输出维度;\
层->偏移_数据=(float*)malloc(sizeof(float) * 层->偏移长度);\
#define 初始化层(ConvX,IN,OUT,KW) \
size = sizeof(层数据);\
\
层=ConvX =(层数据 *)malloc(size);\
初始化ONE层(IN,OUT,KW)\
/*名称,输入维度,输出维度,核宽*/
初始化层(conv1,3,64,3);
初始化层(conv2,64,64,3);
密集残差块数量=5;
size = sizeof(密集残差块)*密集残差块数量;
块=(密集残差块*)malloc(size);
密集残差块 * 密集残差块0=块;
for (int k = 0;k<密集残差块数量;k++)
{
初始化层(密集残差块0->conv1,64,64,3);
初始化层(密集残差块0->conv2,128,64,3);
初始化层(密集残差块0->conv3,192,64,3);
初始化层(密集残差块0->conv4,256,64,1);
密集残差块0++;
}
初始化层(conv3,320,64,1);
初始化层(conv4,64,64,3);
初始化层(up1,64,64,5);
初始化层(up2,64,32,3);
初始化层(up3,32,27,3);
初始化层(out,3,3,3);
}主函数:
void RDN(char * savefilename,RDN模型 & sr)
{
//
int wid=bmp.width;
int hei=bmp.height;
cout<<"输入图像宽度:"<<wid<<endl;
cout<<" 高度:"<<hei<<endl;
//
卷积层 rgb(wid,hei,3);
rgb.data=new float[wid * hei * 3 ];
//jpg转换为RGB卷积层
bmp2RGB(rgb);
//---------------------------------------------->
层数据 * 层;
//两个卷积层 交替前传(源,目标)
//用这个传回
卷积层 * di=(卷积层 *)malloc(sizeof(卷积层));
di->width=1;
di->height=1;
di->depth=1;
di->data=new float[1 ];
卷积层 *源,*目标;
源 = &rgb;
目标 = di;
int pad;
cout<<"输入层..."<<endl;
卷积前传无RELU(sr.conv1);
//备份
卷积层 conv1备份(wid,hei,源->depth);//F_1
conv1备份.data=new float[wid * hei * 源->depth ];
卷积层复制(源,&conv1备份);
卷积前传无RELU(sr.conv2);
//load_mat2卷积层("me/F0.txt",源);
//----------------------------------------------<
//第二部分 5密集残差块
密集残差块总成(sr,*源);
卷积层相加(&conv1备份,源);
//load_mat2卷积层("me/FDF.txt",源);
del卷积层(conv1备份);
//放大3倍
cout<<"放大3倍... "<<endl;
卷积前传(sr.up1);
卷积前传(sr.up2);
卷积前传无RELU(sr.up3);
//亚像素卷积
wid *= 3;hei *= 3;
Resize卷积层(*目标,wid,hei,3);
像素混组放大(源,目标);
std::swap (源,目标);
//load_mat2卷积层("me/FU.txt",源);
卷积前传无RELU(sr.out);
cout<<"生成宽,高:"<<wid<<","<<hei<<endl;
//load_mat2卷积层("me/result.txt",源);
RGB2bmp(*源);
del卷积层(*源);
del卷积层(*目标);
cout<<"图像转换成jpg格式... "<<endl;
savejpg(savefilename);
cout<<"转换文件已经保存为: "<<savefilename<<endl;
}效果图:
 小图
小图
 RDN 3倍
RDN 3倍
 EDSR 3倍重建(EDSR-PyTorch-master运行结果)
EDSR 3倍重建(EDSR-PyTorch-master运行结果)
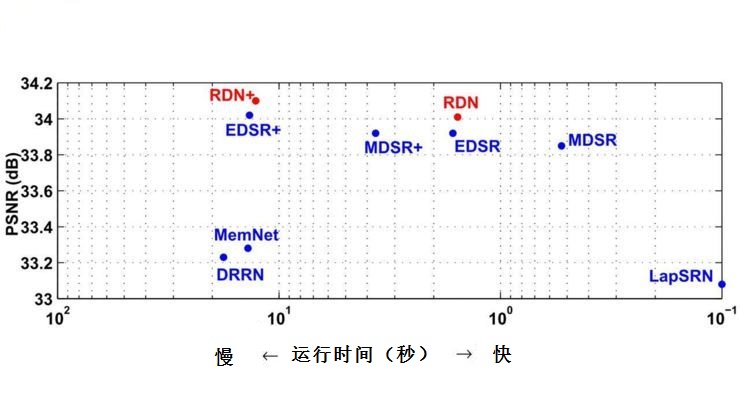
确实和EDSR效果和速度都相差不多。
下载:
win32超分辩重建RDN实用程序
超分辨率重建RDN(3倍)的win32程序,由RDN-TensorFlow-master中的模型改编而来
https://download.csdn.net/download/juebai123/11135013
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/150430.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
