大家好,又见面了,我是你们的朋友全栈君。
力矩:物理学里是指作用力使得物体绕着转动轴或支点转动的趋向。单位是牛顿-米。
力对物体产生转动作用的物理量(分为:力对轴的矩和力对点的矩)即为:M=L*F。
L是从转动轴到着力点的距离矢量,F也是矢量力;因此力矩也是矢量。
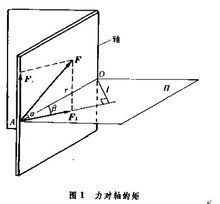
力对轴的矩是力对物体产生绕某一轴转动作用的物理量,其大小等于力在垂直于该轴的平面上的分量和此分力作用线到该轴垂直距离的乘积。例如开门时,外力F平行于门轴的分力FП不能对门产生转动作用(图1),因为这力已被固定轴的约束力(见约束)所平衡。对门能起转动作用的力是F在垂直于门轴的平面上的分力F⊥,其数值F⊥=Fcosα。自F的作用点A作垂直于轴的平面П,与轴相交于O点。由实验得知,力F对物体的转动作用与O至F⊥的垂直距离l成正比。l称为F⊥对轴的力臂,它等于rsinβ,其中r=OA;β是F⊥与OA的夹角。因此,力F对物体的转动作用由Fcosα和rsinβ的乘积来确定,这个物理量称为力F对轴的矩,它是个代数量。当α=0°和β=90°时,力F对轴的矩最大,因此,要提高转动效率,作用力F应在轴的垂直平面内,并使其垂直于联线OA。如果力F在轴的垂直平面内(图2),力对轴的矩为rFsinβ。此量也可用△OAB面积的二倍来表示,其中AB=F。
力对点的矩是力对物体产生绕某-点转动作用的物理量,等于力作用点位置矢和力矢的矢量积。倒如,用球铰链固定于O点的物体受瞬时力F的作用,F的作用点为A,r表示A的位置矢,r与F的夹角为α(图3)。若物体原为静止,受力F作用后,将沿一垂直于r和F组成的平面并通过O点的瞬时轴转动。转动作用的大小由rFsinα表示。由于瞬时轴有方向性,因此将力F对点O之矩定义为一个矢量,用M表示,即M=r×F。M的正向可由右手定则决定(图4);M的大小等于以r和F为边的三角形面积的二倍。
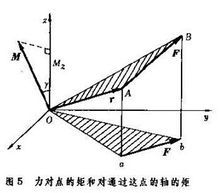
力F对O点的矩M,在过矩心O的直角坐标轴上有三个投影Mx、My、Mz。可以证明,Mz就是F对z轴的矩(图5)。

发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/146435.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
