大家好,又见面了,我是你们的朋友全栈君。
千呼万唤始出来!官方在2020-05-15发布了一个4B的beta版EEPROM固件更新,这次更新终于增加了期待已久的USB引导功能,今天这个教程就来讲一下如何使用USB而脱离SD卡启动树莓派4B。
数据无价,本教程的操作有一定的风险,开始前请备份重要数据!!!
前言
正式开始之前先说一下为什么4B的USB启动这么姗姗来迟。
要了解这个问题,我们先要了解一下4B之前的版本的启动流程,主要分为四个阶段:
- GPU读取芯片上一个ROM的内容并执行
- ROM中的程序挂载SD卡并加载第一个FAT分区上的bootcode.bin
- bootcode.bin从FAT分区加载start.elf
- start.elf从FAT分区加载kernel.img,然后唤醒CPU,CPU开始执行kernel.img
从这个流程中可以看到,第一阶段的BootLoader是从芯片上的ROM中读取的,ROM里的代码是出厂定制好的后期不能再改变。然而随着4B的硬件升级,USB被移到了PCIe总线,网卡也用了新的型号,再加上4B启动过程和SDRAM的设置远比之前的型号要复杂的多,继续使用集成在SoC ROM中的代码是有很大风险的,所以4B增加了一块EEPROM来解决这个问题,启动程序写入到EEPROM中来取代bootcode.bin的工作,启动程序的bug修复和新功能添加都方便了很多。
启动机制改动还是挺大的,所以USB启动姗姗来迟还是可以理解的。
关于EEPROM和4B启动流程的内容可以参考下面两篇文章:
更新eeprom
1、使用rpi-eeprom更新
最新的官方系统里已经集成了rpi-eeprom包来升级eeprom,官方github上有这个项目的源码,如果不是官方系统可以clone此项目来升级eeprom,项目地址是:https://github.com/raspberrypi/rpi-eeprom,里面包含升级脚本和固件。
三方系统(例如树莓派爱好者基地2.0系统)升级方法请看这里,这篇文章介绍官方系统的升级方法:
整个升级过程都需要root权限,如果你是用pi用户登录的,先执行sudo -i切换到root用户。
#升级系统软件包
apt update
apt upgrade
然后编辑/etc/default/rpi-eeprom-update文件,把内容改为FIRMWARE_RELEASE_STATUS="beta"
如果想用固件的默认配置直接执行rpi-eeprom-update -d -a,然后重启完成升级。
如果想修改eeprom的参数配置,请参考这里。
重启后进入系统验证一下eeprom固件版本,执行rpi-eeprom-update,如果BOOTLOADER的版本在2020-05-15及以上就可以USB启动了。
2、卡刷更新
除了进系统使用rpi-eeprom刷新以外,还可以使用卡刷。
到https://github.com/raspberrypi/rpi-eeprom/releases下载最新的发布版rpi-boot-eeprom-recovery-xxxx.zip,然后解压到一张FAT32格式的空SD卡中,注意,直接解压pieeprom.bin、pieeprom.sig、recovery.bin等文件到根目录下不能带文件夹,插卡上电,绿色LED快速闪烁,至少等待10S后eeprom就刷好了。卡刷的方法更简单,推荐使用。
准备启动介质
eeprom升级后要配合最新的BootLoader才能实现USB启动,而这个包目前在软件源中还没有更新,只能去github下载,地址:https://github.com/Hexxeh/rpi-firmware,打包下载后待用。
现在开始制作USB启动介质,如果想刷一个全新系统直接把镜像刷到U盘即可,如果想把当前SD卡上的系统迁移到U盘,可以使用这个脚本制作一个最小镜像(具体方法参考这里的后半部分),然后把镜像刷到U盘里。
刷好镜像,把U盘插到电脑上,解压上面下载的rpi-firmware包,把里面的fixup*.dat和star*.elf文件拷贝到U盘覆盖原文件。
把SD卡从pi上取出,插上U盘就可以从U盘启动了。
镜像刷到移动硬盘也是可以的,但是如果硬盘里原来有数据,那么数据将会被清除,想保留硬盘数据又想用硬盘启动树莓派也是有办法的,具体方法看这里。
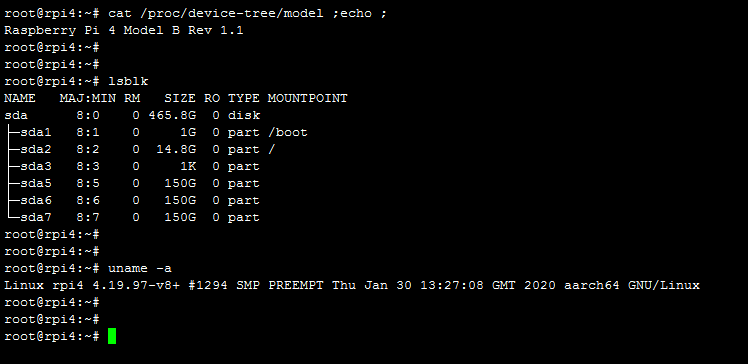
最后放一张多分区移动硬盘启动的图

本文为原创文章,转载请联系博主获得授权。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/144801.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
