大家好,又见面了,我是你们的朋友全栈君。
深刻理解PID
1. 典型的传递函数——一阶惯性环节
一个储能元件(如电感,电容)与一个耗能元件(如电阻)的组合,就能构成一阶惯性环节。
如一个RC电路

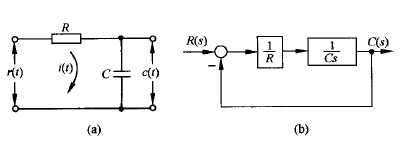
特点:当输入量发生突变时,输出量不能突变,只能按照指数规律逐渐变换,这就反应了该环节具有惯性。(也就是说,惯性环节的输出一开始并不与输入同步按比例变化,直到过渡过程结束,y(t)才能与x(t)保持比例。)而惯性环节的时间常数就是惯性的量度。
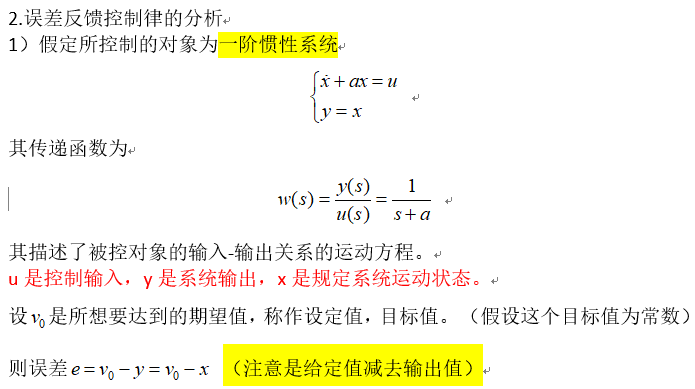
我们的目的是给系统施加一个控制力,使输出值趋于给定值,使误差趋于零。
根据误差,给出误差的比例反馈的控制力,即误差大时施加大的作用力,误差小时施加小的作用力。
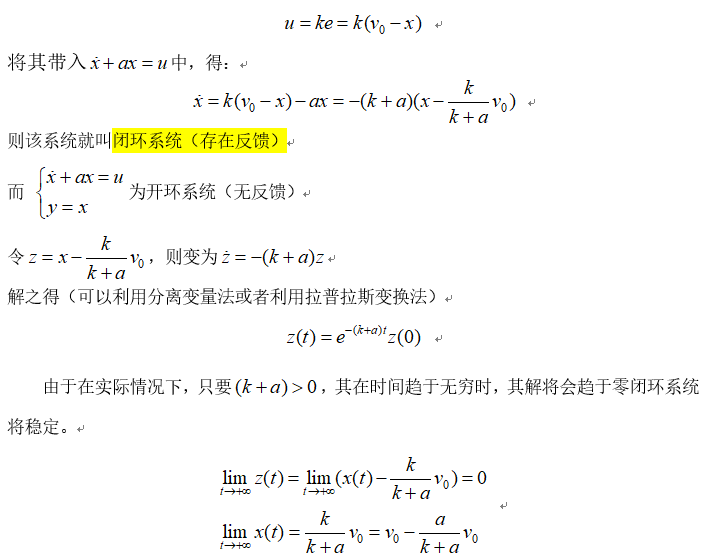
总结:对一个一阶惯性系统,若有一个常数给定值施加一个比例反馈控制,构成了一个闭环系统而不可避免地产生稳态误差。
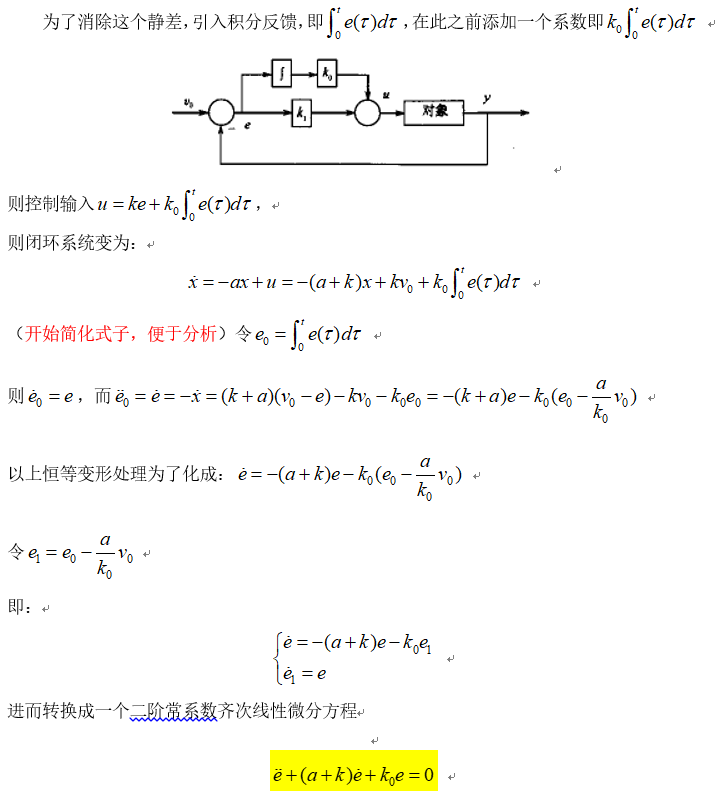
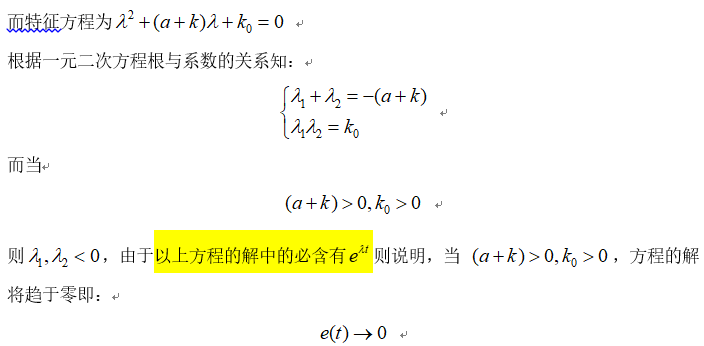

总结:在加入比例–积分反馈控制后,消除了阶跃对于一阶惯性系统输入引起的稳态误差。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/144481.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
