大家好,又见面了,我是你们的朋友全栈君。





clc;
clear all;
close all;
%运行时间
time = 10;
%仿真步长
h = 0.01;
%时间定义
t =0.01 : h : time;
%跟踪信号
v0 = zeros( 1 , time/h);
for i = time/h/2+1 : time/h
v0(i) = 1;
end
rand_noise = 0.05 * randn(1 , time/h);
%加入随机噪声
vn = v0 + rand_noise;
%----------------------ADRC--------------------------%
%%
%--参数初始化--%
%跟踪微分器参数
r = 100;%r表示跟踪快慢
h0 = 5 * h;%h0代表信号平滑度(滤波效果)
v1_last = 0;
v2_last = 0;
v0_last = 0;
%扩张状态观测器参数
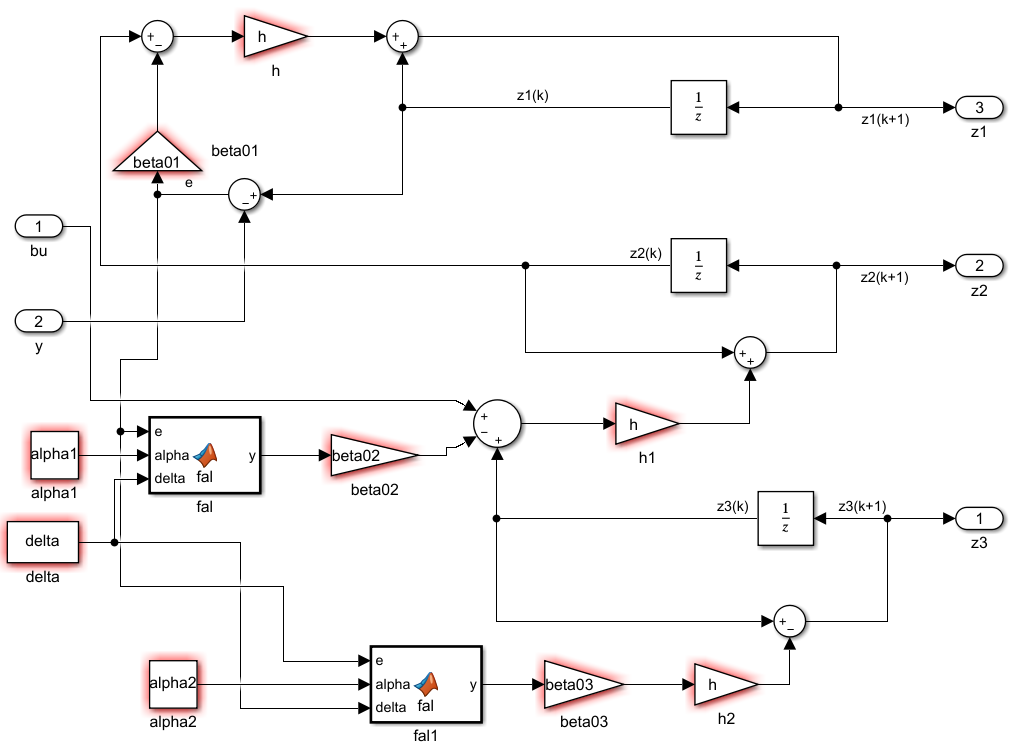
beta01 = 10;
beta02 = 200;
beta03 = 30;
alpha1 = 0.5;%文献里给了值,就别动了
alpha2 = 0.25;%文献里给了值,就别动了
delta = 0.0025;
b=1;
z1_last = 0;
z2_last = 0;
z3_last = 0;
%非线性误差反馈
nlsef_alpha1 = 0.7;
nlsef_alpha2 = 1;
%被控对象初始化
temp_y=[0.5 ; 0];
u_last= 0 ;
%%
%--ADRC正式开始--%
for k=1 : time/h
%第一轮迭代的处理
%两个参数分别为控制量和当前时间
parameter1 = u_last;
parameter2 = k * h;
tSpan=[0 h];
%利用龙格库塔法求解微分方程
[~,total_y] = ode45('plant',tSpan,temp_y,[],parameter1,parameter2);
%total_state里的元素都是龙格库塔一点点计算的结果,直接用最后一列,即计算结果即可
temp_y = total_y(length(total_y),:);
%记录下输出和输出的微分值
y(k) = temp_y(1);
dy(k) = temp_y(2);
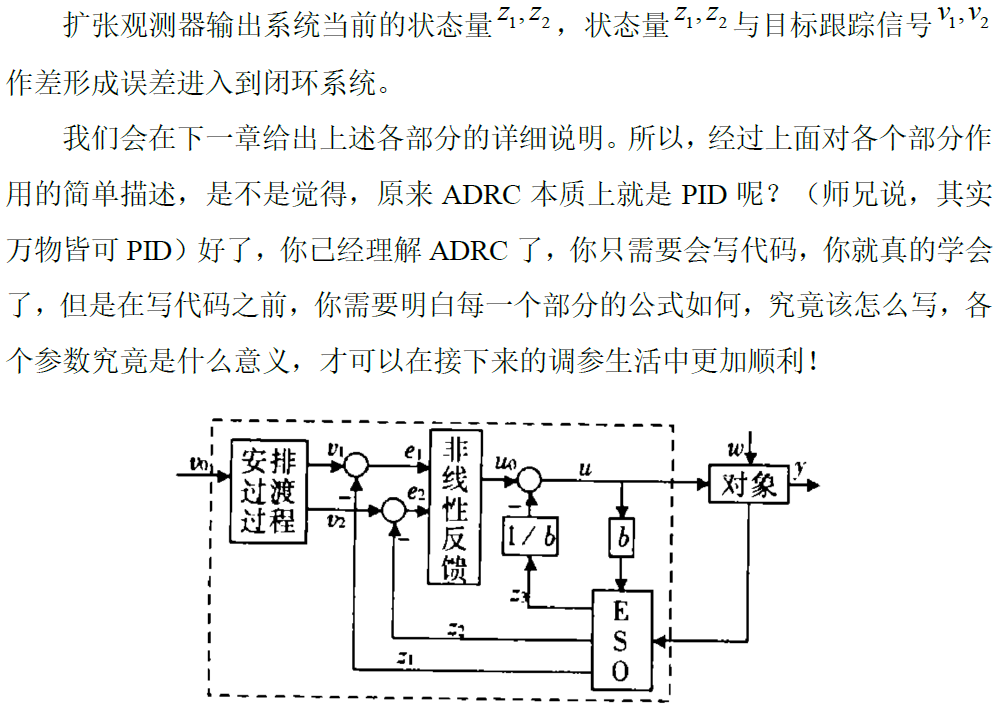
%--跟踪微分器TD--%
v1(k) = v1_last + h * v2_last
v2(k) = v2_last + h * fst(v1_last - vn(k) , v2_last , r , h0);
% v2(k) = v2_last + deltaT * fst(v1_last - v0(k) , v2_last , r , h0);
x3(k) = -v1_last^2;
v1_last = v1(k);
v2_last = v2(k);
% v0_last = v0(k);
v0_last = vn(k);
%--扩张状态观测器ESO--%
e = z1_last - y(k);
z1(k) = z1_last + h * (z2_last - beta01 * e);
z2(k) = z2_last + h * (z3_last - beta02 * (fal(e , alpha1 , delta)) +b * u_last);
z3(k) = z3_last - h * beta03 * (fal(e , alpha2 , delta));
z1_last = z1(k);
z2_last = z2(k);
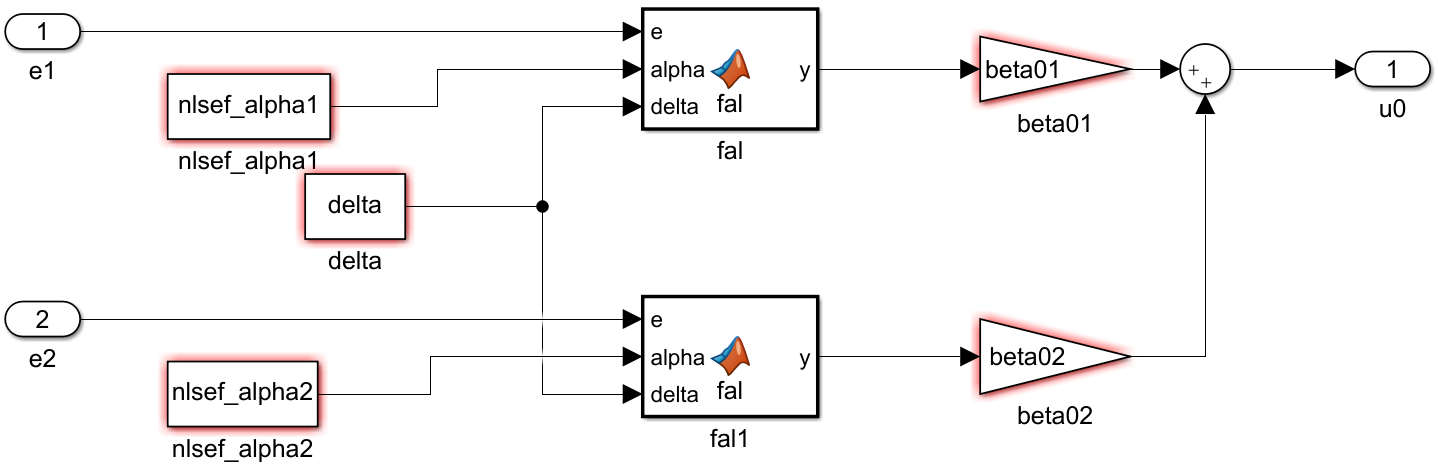
%--非线性误差反馈NLSEF--%
e1(k) = v1(k) - z1(k);
e2(k) = v2(k) - z2(k);
%使用非线性误差反馈,其实就是非线性的PID
u0(k) = beta01 * fal(e1(k) , nlsef_alpha1 , delta) + beta02 * fal(e2(k) , nlsef_alpha2 , delta);
u(k) = u0(k) - z3(k)/b;
u_last = u(k);
% %%
% %--可对比PD控制器--%
% u(k) = kp * e1(k) + kd * e2(k);
% u_last = u(k);
end
figure(1);
plot(t,u,'r');
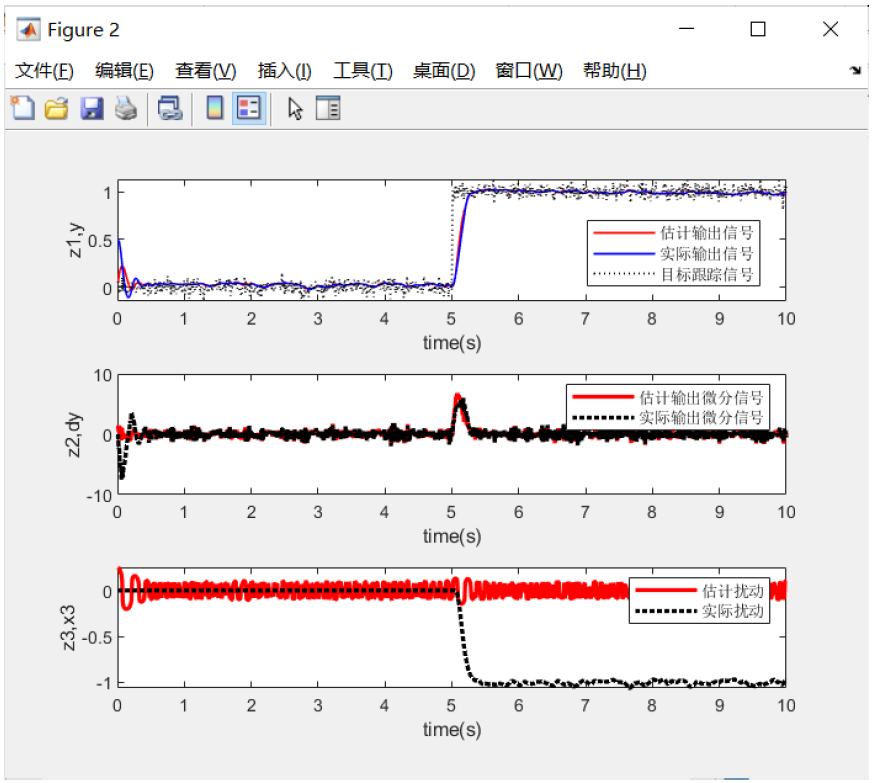
figure(2);
subplot(311);
% plot(t,z1,'r',t,y,'k:',t,v0,'b','linewidth',2);
plot(t,z1,'r',t,y,'k:',t,vn,'b','linewidth',2);
xlabel('time(s)'),ylabel('z1,y');
legend('估计输出信号', '实际输出信号');
subplot(312);
plot(t,z2,'r',t,dy,'k:','linewidth',2);
xlabel('time(s)'),ylabel('z2,dy');
legend('估计输出微分信号', '实际输出微分信号');
subplot(313);
plot(t,z3,'r',t,x3,'k:','linewidth',2);
xlabel('time(s)'),ylabel('z3,x3');
legend('估计扰动', '实际扰动');
%%
%---------------------------函数部分-----------------------------%
%sat函数
function y=sat(a,d)
if abs(a)<=d
y=a/d;
else
y=sgn(a);
end
end
%符号函数
function y=sgn(x)
if x>0
y=1;
elseif x<0;
y=-1;
else
y=0;
end
end
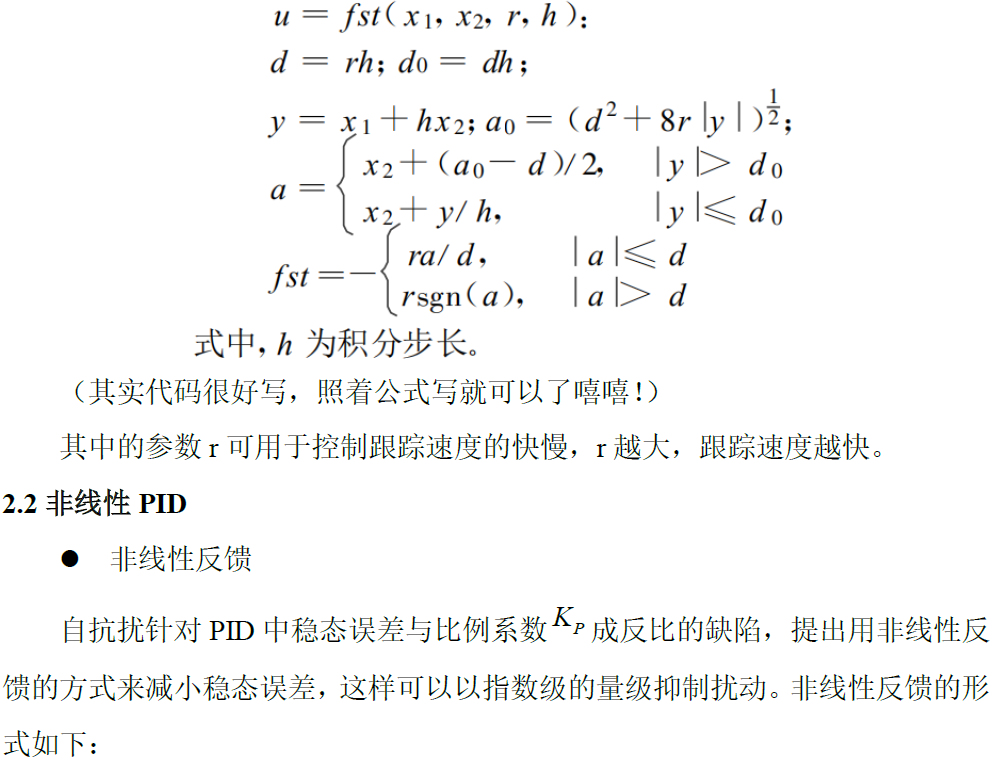
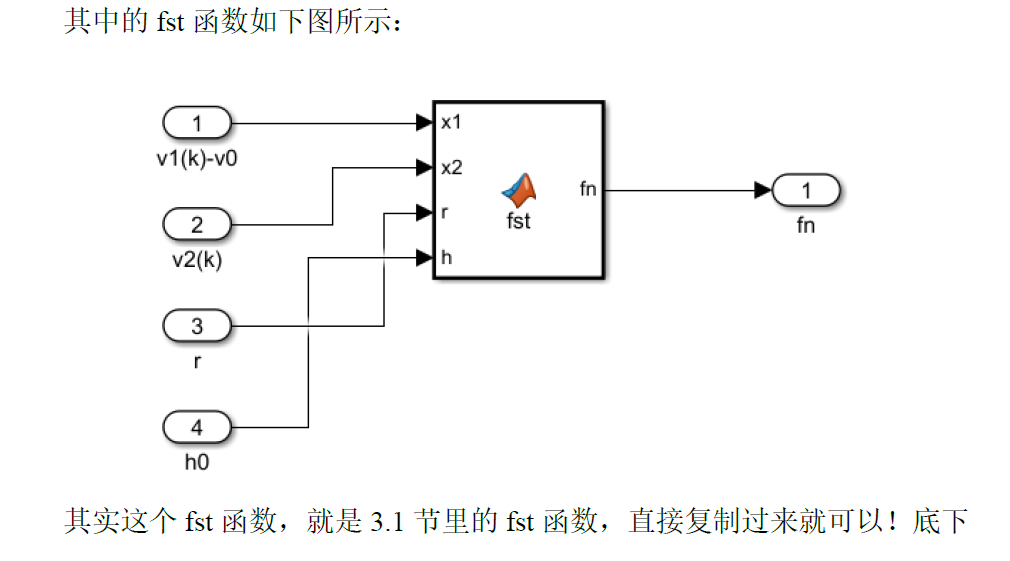
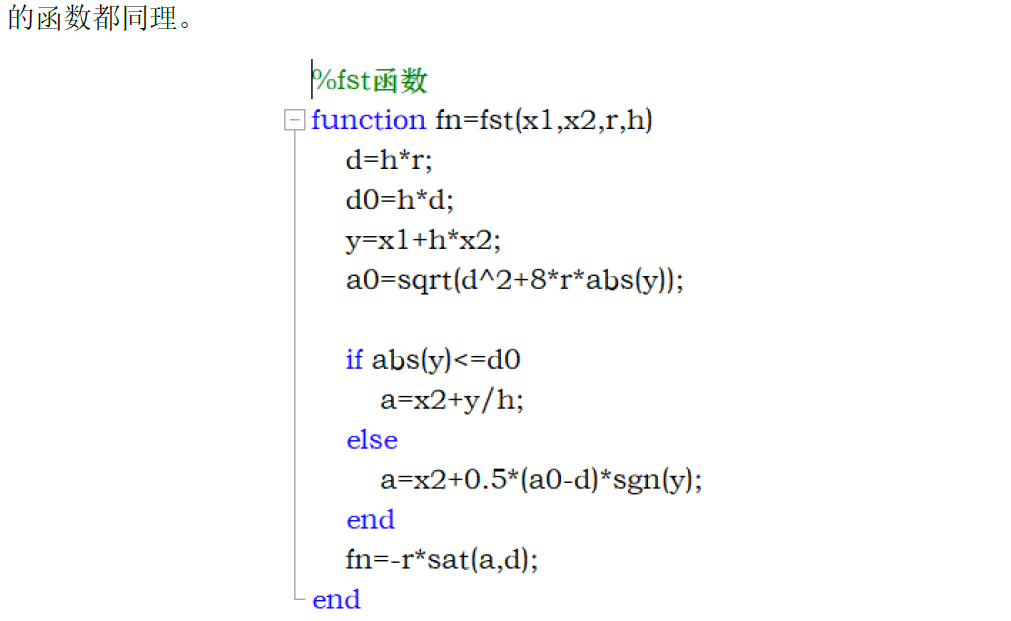
%fst函数
function fn=fst(x1,x2,r,h)
d=h*r;
d0=h*d;
y=x1+h*x2;
a0=sqrt(d^2+8*r*abs(y));
if abs(y)<=d0
a=x2+y/h;
else
a=x2+0.5*(a0-d)*sgn(y);
end
fn=-r*sat(a,d);
end
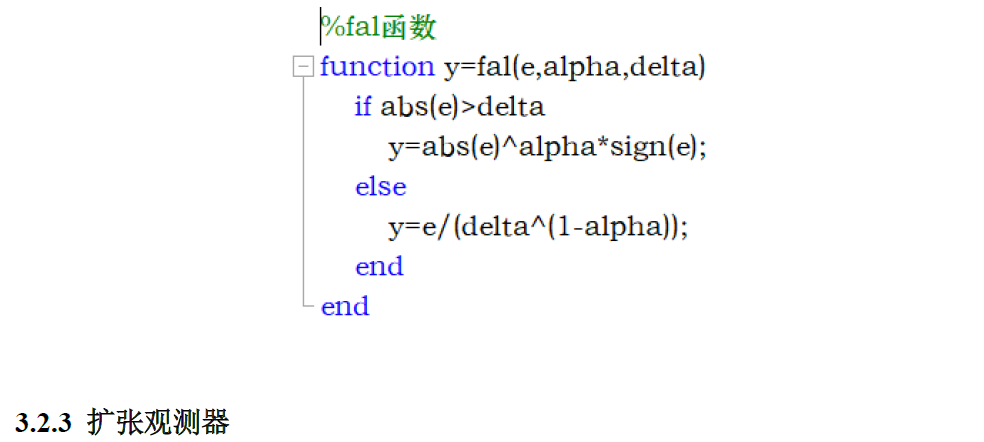
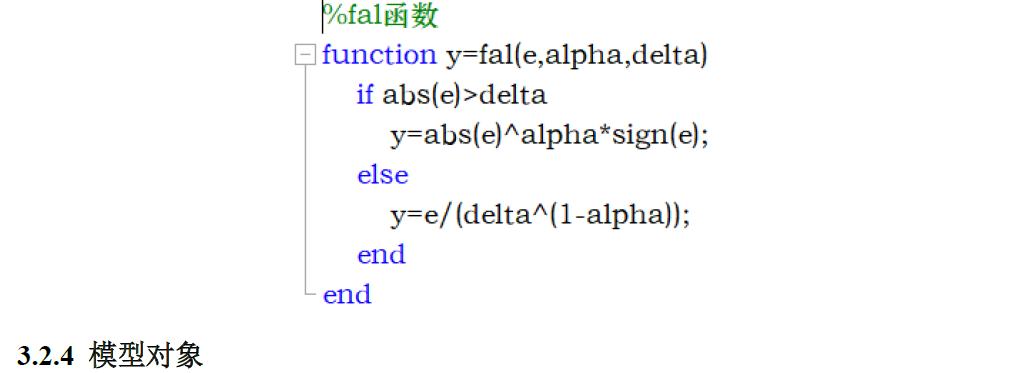
%fal函数
function y=fal(e,alpha,delta)
if abs(e)>delta
y=abs(e)^alpha*sign(e);
else
y=e/(delta^(1-alpha));
end
end
% %-----------------------------------------------------------------%

%%
%系统方程----------------可以尝试多种龙格库塔的写法,把这个函数搞清楚,先照写
function dy = PlantModel(t,y,flag,p1,p2)
%第一个参数:控制量
u=p1;
%第二个参数:当前时间
time=p2;
%初始化2*1的向量
dy=zeros(2,1);
%方程
dy(1)=y(2);
dy(2)=-y(1)^2+u;
end








%--参数初始化--%
h = 0.01;
%跟踪微分器参数
r = 100;%r表示跟踪快慢
h0 = 5 * h;%h0代表信号平滑度(滤波效果)
v1_last = 0;
v2_last = 0;
v0_last = 0;
%扩张状态观测器参数
beta01 = 100;
beta02 = 200;
beta03 = 300;
alpha1 = 0.5;%文献里给了值,就别动了
alpha2 = 0.25;%文献里给了值,就别动了
delta = 0.0025;
b=1;
z1_last = 0;
z2_last = 0;
z3_last = 0;
%非线性误差反馈
nlsef_alpha1 = 0.7;
nlsef_alpha2 = 0.95;

%sat函数
function y=sat(a,d)
if abs(a)<=d
y=a/d;
else
y=sgn(a);
end
end

%符号函数
function y=sgn(x)
if x>0
y=1;
elseif x<0;
y=-1;
else
y=0;
end
end

鉴于有相当多的人问我要ADRC的simulink文件,我就直接丢一个百度云盘的链接啦,点个赞再走嘻嘻!
链接:https://pan.baidu.com/s/1d5x1jIekg-NVAIixeWeHIg
提取码:nfgg
复制这段内容后打开百度网盘手机App,操作更方便哦
作于:
2020-11-7
9:29
修改于:
2020-12-4
1:09
修改内容:添加ADRC的simulink下载链接。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/144242.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
