
大家好,又见面了,我是你们的朋友全栈君。
1.任务间通讯方式:信号量和邮箱
为了把描述事件的数据结构统一起来,UCOSII 使用叫做事件控制块(ECB)的数据结构来描述诸如信号量、邮箱(消息邮箱)和消息队列这些事件。信号量,邮箱,消息队列都是一类事件。
2.信号量: 1) 创建信号量OS_EVENT *OSSemCreate (INT16U cnt)
2)请求信号量 OSSempend(OS_EVENT *pevent,INT16U timeout,INT8U *err;
3) 发送信号量(访问共享资源结束后,释放信号量)OSSemPost(OS_EVENT *pevent);
4)删除信号量(不需要某个信号量时) OSSemDel(OS_EVENT *pevent,INT8U opt,INT8U *err)。
3.邮箱:在多任务操作系统中,常常需要在任务与任务之间通过传递一个数据(这个数据叫消息)的方式来进行通信。为了达到这个目的,可以在内存中创建一个存储空间作为该数据的缓冲区。如果把这个缓冲区称之为消息缓冲区,这样在任务间传递数据的最简单办法就是传递消息缓冲区的指针。我们把用来传递消息缓冲区指针的数据结构叫做邮箱。
1)创建消息邮箱:OS_EVENT *OSMboxCREAT(void *msg);函数中的参数msg为消息的指针,函数的返回值为消息邮箱的指针。
2) 向消息邮箱中发送消息函数 OSMBoxPost(OS_EVENT *pevent,void *msg);其中pevent为消息邮箱的指针,msg为消息指针。
3) 请求邮箱:OSMboxPend ( vOS_EVENT *pevent, INT16U timeout, INT8U err),这个函数的主要作用就是查看邮箱指针OSEventPtr是否为NULL,如果不是NULL就把邮箱中的消息指针返回给调用函数的任务,同时用OS_NO_ERR通过函数的参数err通知任务获取消息成功;如果邮箱指针OSEventPtr是NULL,则使任务进入等待状态,并引发一次任务调度。pevent为请求邮箱指针,timeout为等待时限,err为错误信息。
4)查询邮箱状态:OSMboxQuery(OS_EVENT *pevent,OS_MBOX_DATA *pdata),其中pevent为纤细邮箱指针,pdata为存放邮箱信息的结构。
5)删除邮箱函数:OS_EVENT *OS_MboxDel(OS_EVENT *pevent,INT8U opt,INT8U *err);其中pevent为消息邮箱指针,opt为删除选项,err为错误信息
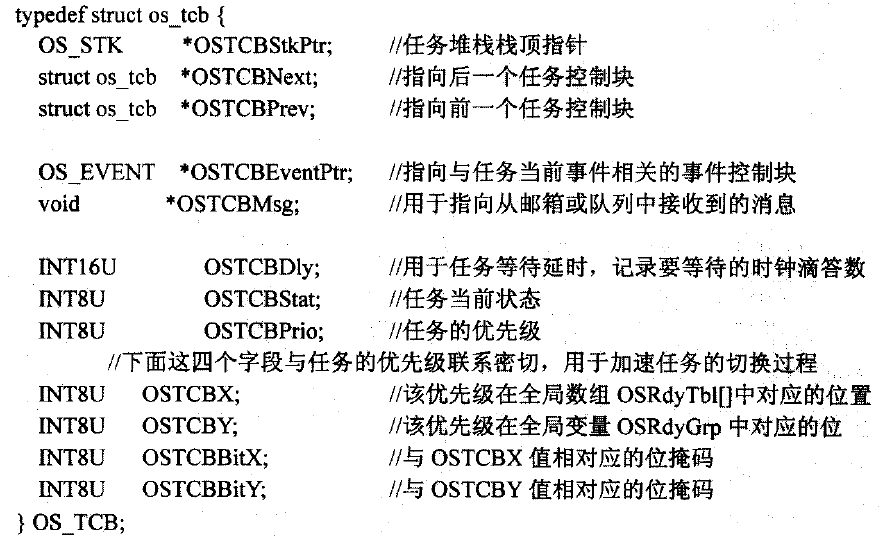
4.对任务控制块的理解
任务控制块就是一个结构体,结构体中定义了许多与任务相关的变量,包括优先级等。任务堆栈和任务控制块是一一对应的关系,任务堆栈可以理解为一个存储器,每个任务都有一个任务堆栈,任务堆栈就是装任务控制块的,只是不是直接装,而是通过任务控制块里面的任务堆栈指针变量指向任务堆栈而已,同时可以将所有任务控制块链接为一个任务链表,这样方便任务的管理,任务管理实质是对任务链表的管理。

发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/144088.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...