大家好,又见面了,我是你们的朋友全栈君。
1. 简介
PID控制应用广泛,说起来PID特别的简单,在比例负反馈的基础上加入微分项实现快速调节,加入积分项实现无静差。MATLAB强大的功能让学习变得非常简单。在学习智能控制这门课的时候,老师推荐了刘金琨老师的先进PID控制一书,边看边学边调程序。下文程序选自此书。
2. 模拟PID
首先从模拟PID开始,被控系统一般是下图这种结构:

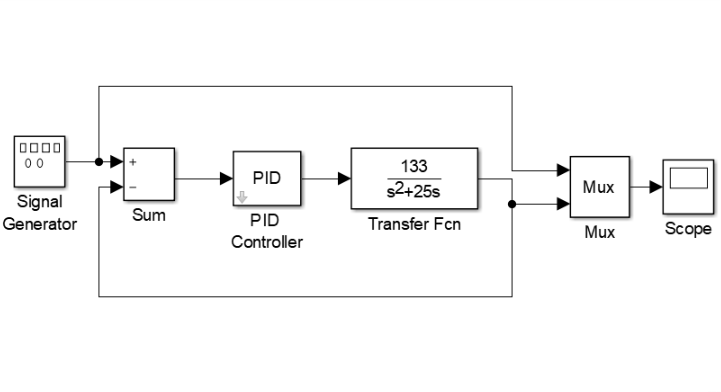
其中PID控制器:
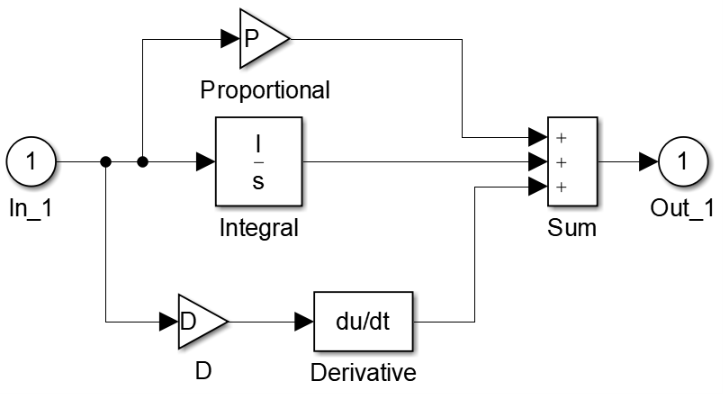
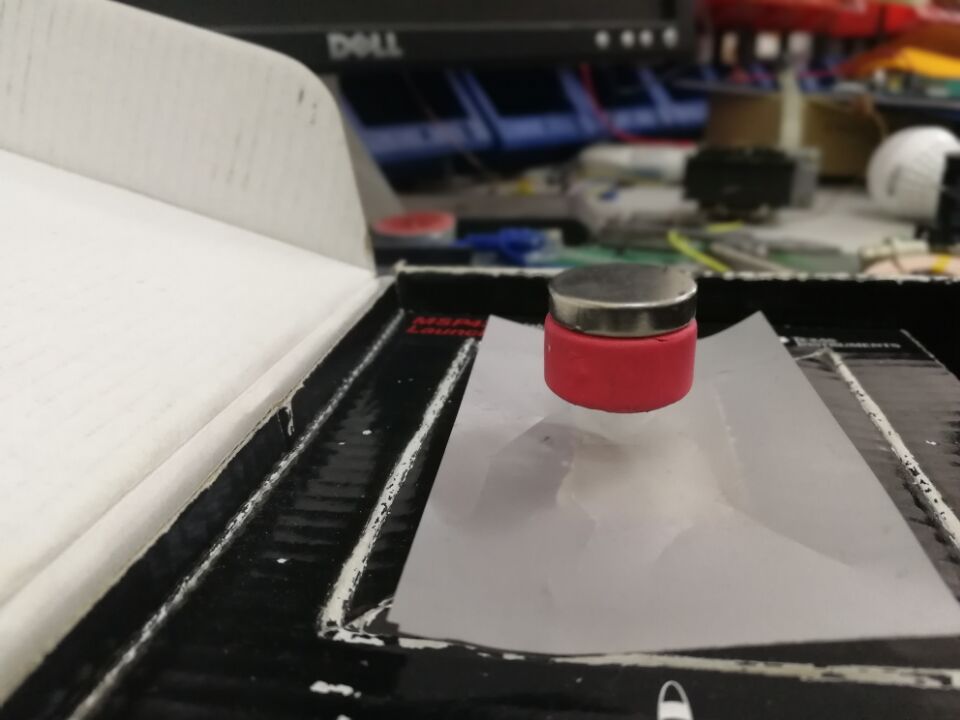
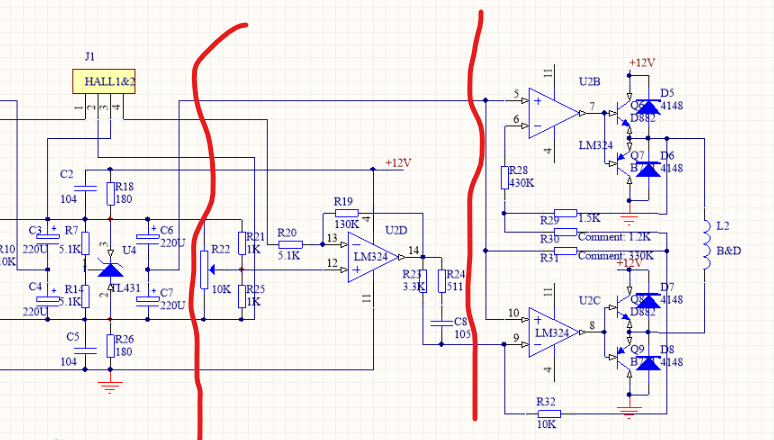
一种用模拟PID控制的磁悬浮:
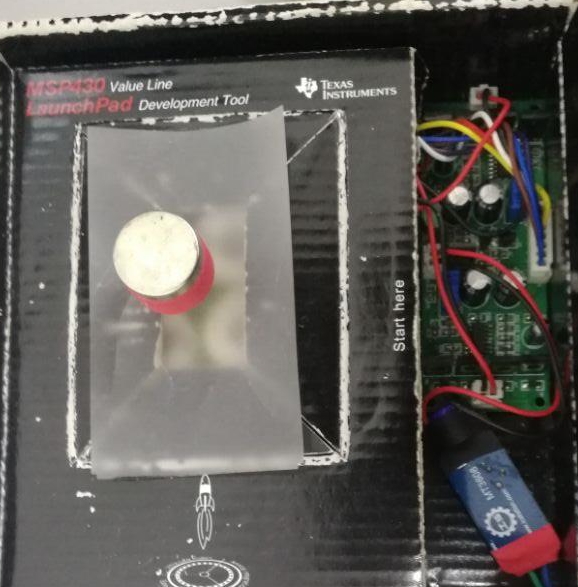
电路图
左侧是霍尔传感器获得磁体的位置,中间是控制器,右侧是驱动部分。U2D是比例放大器,后面的网络引入了微分。
对系统的仿真,可以使用SIMULINK,还可以通过S函数实现:
%S-function for continuous state equation
function [sys,x0,str,ts]=s_function(t,x,u,flag)
switch flag,
%Initialization
case 0,
[sys,x0,str,ts]=mdlInitializeSizes;
%Outputs
case 3,
sys=mdlOutputs(t,x,u);
%Unhandled flags
case {
2, 4, 9 }
sys = [];
%Unexpected flags
otherwise
error(['Unhandled flag = ',num2str(flag)]);
end
%mdlInitializeSizes
function [sys,x0,str,ts]=mdlInitializeSizes
sizes = simsizes;
sizes.NumContStates = 0;
sizes.NumDiscStates = 0;
sizes.NumOutputs = 1;
sizes.NumInputs = 3;
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 0;
sys=simsizes(sizes);
x0=[];
str=[];
ts=[];
function sys=mdlOutputs(t,x,u)
error=u(1);
derror=u(2);
errori=u(3);
kp=60;
ki=1;
kd=3;
ut=kp*error+kd*derror+ki*errori;
sys(1)=ut;3. 离散系统PID
有了方便的计算机,很多时候数字控制器变得特别方便。
对一个系统
1/(1+s)
%Discrete PID control for continuous plant
clear all;
close all;
ts=0.001; %Sampling time
xk=zeros(2,1);
e_1=0;
u_1=0;
for k=1:1:2000
time(k) = k*ts;
yd(k)=0.50*sin(1*2*pi*k*ts);
para=u_1;
tSpan=[0 ts];
[tt,xx]=ode45('chap1_6plant',tSpan,xk,[],para);
xk = xx(length(xx),:);
y(k)=xk(1);
e(k)=yd(k)-y(k);
de(k)=(e(k)-e_1)/ts;
u(k)=20.0*e(k)+0.50*de(k);
%Control limit
if u(k)>10.0
u(k)=10.0;
end
if u(k)<-10.0
u(k)=-10.0;
end
u_1=u(k);
e_1=e(k);
D=1;
if D==1 %Dynamic Simulation Display
plot(time,yd,'b',time,y,'r');
pause(0.00000000000000000);
end
end
figure(1);
plot(time,yd,'r',time,y,'k:','linewidth',2);
xlabel('time(s)');ylabel('yd,y');
legend('Ideal position signal','Position tracking');
figure(2);
plot(time,yd-y,'r','linewidth',2);
xlabel('time(s)'),ylabel('error');版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/142051.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
