大家好,又见面了,我是你们的朋友全栈君。
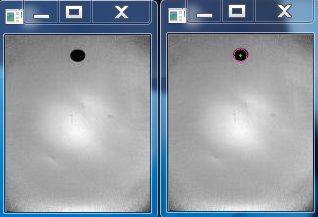
将tof相机得到的深度图像转换为灰度图像,然后对灰度图像进行双边滤波,去除噪声的同时使边缘得到较好的保持,然后对滤波后的灰度图像进行hough圆变换,得到圆心在图像中的像素坐标,然后利用tof相机的点云数据,求得圆心在tof相机坐标系下的三维坐标。
程序如下:
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include "opencv2/features2d/features2d.hpp" //需要添加该头文件
#include <iostream>
#include "Math.h"
using namespace cv;
using namespace std;
int main(int argc, char**argv)
{
Mat src, gray, edge, erzhitu, bifilter;
//读入图像
src = imread("D:\\yanxiaopan\\my project\\2017.2.22\\X\\250\\f.jpg");
if (!src.data)
return -1;
//灰度化
cvtColor(src, gray, CV_BGR2GRAY);
//双边滤波,双边滤波既可以滤除噪声,也能较好的保持图像中的边缘
bilateralFilter(gray, bifilter, 25, 25 * 2, 25 / 2);
//huogh圆变换
vector<Vec3f> circles;
HoughCircles(bifilter, circles, HOUGH_GRADIENT, 1.5, 3, 50, 25, 0, 25);
cout << "circles.size()=" << circles.size() << endl;
Point final_center;
for (size_t i = 0; i < circles.size(); i++)
{
Point center(cvRound(circles[i][0]), cvRound(circles[i][1]));
final_center = center;
int radius = cvRound(circles[i][2]);
cout << "center(" << i << ")=(" << cvRound(circles[i][0]) << "," << cvRound(circles[i][1]) << ")" << endl;
cout << "radius=" << radius << endl;
circle(src, center, 1, Scalar(0, 255, 0), -1, 8, 0);
circle(src, center, radius, Scalar(155, 50, 255), 1, 8, 0);
}
imshow("src", src);
imshow("gray", gray);
imshow("bifilter", bifilter);
//读入点云数据
FILE *fp = fopen("D:\\yanxiaopan\\my project\\2017.2.22\\X\\250\\clo31.txt", "r");
if (fp == NULL)
{
cout << "file open error\n" << endl;
return -1;
}
//将所有像素点的三维坐标分别保存在以下数组中
double xx[25344];//所有像素点的x坐标
double yy[25344];
double zz[25344];
for (int i = 0; i <25344; i++)
{
fscanf(fp, "%lf,%lf,%lf", &xx[i], &yy[i], &zz[i]);
}
fclose(fp);
double center_x = xx[(final_center.x - 1) * 176 + final_center.y];
double center_y = yy[(final_center.x - 1) * 176 + final_center.y];
double center_z = zz[(final_center.x - 1) * 176 + final_center.y];
cout << "center_x=" << center_x << endl;
cout << "center_y=" << center_y << endl;
cout << "center_z=" << center_z << endl;
waitKey(0);
return 0;
}
此方法计算出的圆心在相机下三维坐标与其实际值存在一定的误差,因圆形目标中心与相机中心在X轴或Y轴方向偏离较大时,圆形目标在相机场景下呈现椭圆状态,后续对此进行了改进。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/141627.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
