大家好,又见面了,我是你们的朋友全栈君。
最近遇到了个问题,cv_bridge实现了opencv和ros中图像数据类型的转换,但ros-melodic默认python版本是python2。在配置yolact环境的时候,要求是python3。
这就导致在ros自带的cv_bridge是python2版本,想使用python3的话需要自己去编译cv_bridge。否则会报错:
ImportError: dynamic module does not define module export function (PyInit_cv_bridge_boost)
配置环境
Ubuntu18.04
ros-melotic
注意:操作要在系统的真实空间中,不要在conda建立的虚拟空间中操作!!!
python3编译cv_bridge
1、安装相关依赖包
sudo apt-get install python-catkin-tools python3-dev python3-catkin-pkg-modules python3-numpy python3-yaml ros-melodic-cv-bridge
2、创建一个工作空间用于存放待编译的 cv_bridge 文件
mkdir -p catkin_workspace/src
cd catkin_workspace
3、指示carkin设置cmake变量
注意:ros-melodic使用的是Python3.6,而kinetic使用的是Python3.5
catkin config -DPYTHON_EXECUTABLE=/usr/bin/python3 -DPYTHON_INCLUDE_DIR=/usr/include/python3.6m -DPYTHON_LIBRARY=/usr/lib/x86_64-linux-gnu/libpython36m.so
4、
catkin config –install
5、在catkin_workspace工作空间中克隆 cv_bridge
git clone https://github.com/ros-perception/vision_opencv.git src/vision_opencv
6、查看安装的版本
apt-cache show ros-melodic-cv-bridge | grep Version
7、编译
catkin build
验证
1、首先进入自己的工作空间目录下,进行catkin_make,然后source

2、进入到创建的虚拟环境,进入到编译好cv_bridge的工作空间下运行
–extend表示:在原有的路径配置下,加入一个配置。这个过程不会影响之前的配置
conda activate yolact
source install/setup.bash –extend


3、运行自己创建的节点
另一种验证
如果没有创建的话,可知执行一下命令
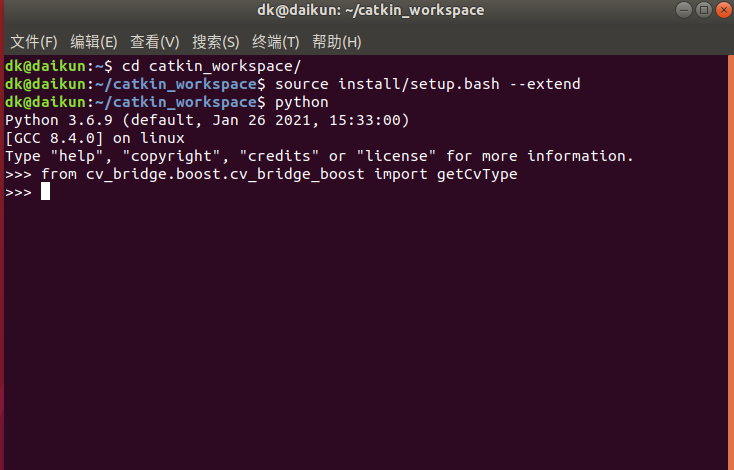
cd catkin_workspace/
source install/setup.bash –extend
python
from cv_bridge.boost.cv_bridge_boost import getCvType
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/140735.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...