大家好,又见面了,我是你们的朋友全栈君。
术语
内参矩阵: Intrinsic Matrix
焦距: Focal Length
主点: Principal Point
径向畸变: Radial Distortion
切向畸变: Tangential Distortion
旋转矩阵: Rotation Matrices
平移向量: Translation Vectors
平均重投影误差: Mean Reprojection Error
重投影误差: Reprojection Errors
重投影点: Reprojected Points
四个坐标系
世界坐标系
相机坐标系
z轴为光轴.原点为光心.
图像坐标系
像素坐标系
前三个坐标系的单位是米或者毫米,最后一个是像素.
世界转相机
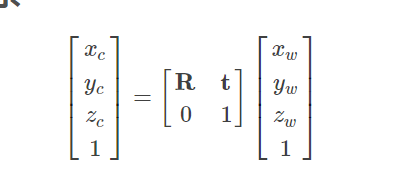

R为3 x 3 旋转矩阵, t为3 x 1平移向量.
相机转图像
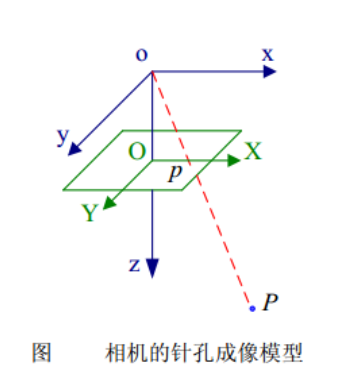
如图,空间任意一点P与其图像点p之间的关系,P与相机光心o的连线为oP,oP与像面的交点p即为空间点P在图像平面上的投影。
该过程为透视投影,如下矩阵表示:
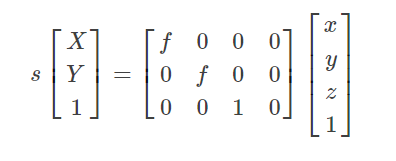
其中,s为比例因子(s不为0),f为有效焦距(光心到图像平面的距离). (x,y,z)为相机坐标系内的点,(X,Y)为图像坐标系内的点.
图像转像素
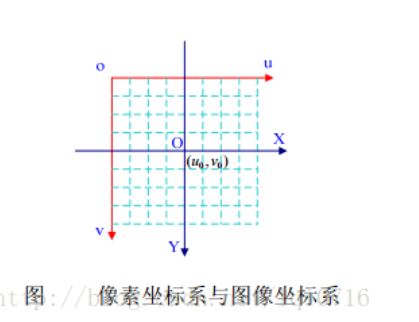
图像坐标系
图中的XOY.原点为光轴与相面交点. 单位通常为毫米.
像素坐标系
图像左上角为原点. 图中的uov
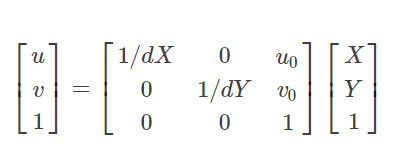
dx,dy代表在x,y方向,每个像素代表多少毫米. u0,v0代表图像XOY的原点在uov的像素坐标。
世界转像素
有了上面的讨论,可得:
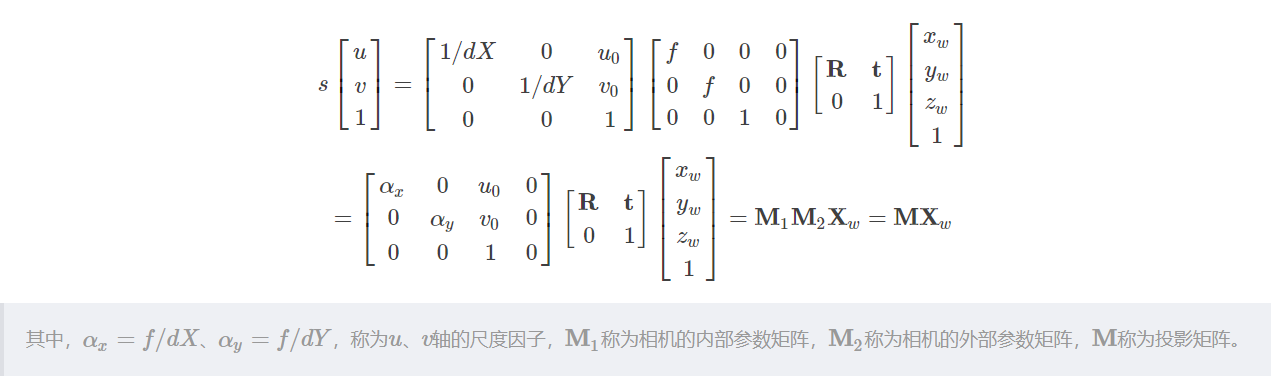
M1的参数是由相机本身决定的.所以叫内参.
相机标定
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/140339.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
