大家好,又见面了,我是你们的朋友全栈君。
“最短路径算法:Dijkstra算法,Bellman-Ford算法,Floyd算法和SPFA算法等。从某顶点出发,沿图的边到达另一顶点所经过的路径中,各边上权值之和最小的一条路径叫做最短路径。”
我们解决最短路径问题,常用的是Dijkstra与Floyd算法
Dijkstra(迪杰斯特拉)算法
他的算法思想是按路径长度递增的次序一步一步并入来求取,是贪心算法的一个应用,用来解决单源点到其余顶点的最短路径问题。
算法思想
首先,我们引入一个辅助向量D,它的每个分量D[i]表示当前找到的从起始节点v到终点节点vi的最短路径的长度。它的初始态为:若从节点v到节点vi有弧,则D[i]为弧上的权值,否则D[i]为∞,显然,长度为D[j] = Min{D[i] | vi ∈V}的路径就是从v出发最短的一条路径,路径为(v, vi)。
那么,下一条长度次短的最短路径是哪一条呢?假设次短路径的终点是vk,则可想而知,这条路径或者是(v, vk)或者是(v, vj, vk)。它的长度或者是从v到vk的弧上的权值,或者是D[j]和从vj到vk的权值之和。
一般情况下,假设S为已知求得的最短路径的终点集合,则可证明:一下条最短路径(设其终点为x)或者是弧(v, x)或者是中间只经过S中的顶点而最后到达顶点x的路径。这可用反证法来证明,假设此路径上有一个顶点不在S中,则说明存在一条终点不在S中而长度比此路径短的路径。但是这是不可能的。因为,我们是按路径常度的递增次序来产生个最短路径的,故长度比此路径端的所有路径均已产生,他们的终点必定在S集合中,即假设不成立。
因此下一条次短的最短路径的长度是:D[j] = Min{D[i] | vi ∈ V - S},其中,D[i]或者是弧(v, vi)的权值,或者是D[k](vk ∈ S)和弧(vk, vi)上权值之和。
算法描述
假设现要求取如下示例图所示的顶点V0与其余各顶点的最短路径:
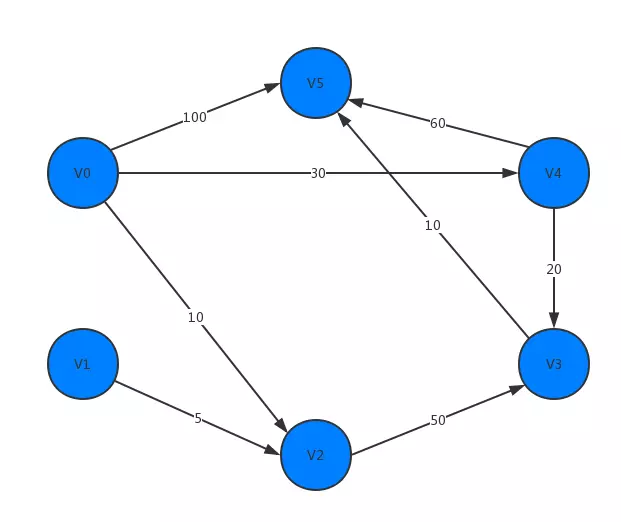

我们使用Guava的ValueGraph作为该图的数据结构,每个顶点对应一个visited变量来表示节点是在V中还是在S中,初始时S中只有顶点V0。然后从nodes集合中遍历找出从V0出发到各节点路径最短的节点,并将该节点并入S中(即修改该节点的visited属性为true),此时就找到了一个顶点的最短路径。然后,我们看看新加入的顶点是否可以到达其他顶点,并且看看通过该顶点到达其他点的路径长度是否比从V0直接到达更短,如果是,则修改这些顶点的权值(即if (D[j] + arcs[j][k] < D[k]) then D[k] = D[j] + arcs[j][k])。然后又从{V – S}中找最小值,重复上述动作,直到所有顶点都并入S中。
Floyd(弗洛伊德)算法
Floyd算法是一个经典的动态规划算法。是解决任意两点间的最短路径(称为多源最短路径问题)的一种算法,可以正确处理有向图或负权的最短路径问题。(动态规划算法是通过拆分问题规模,并定义问题状态与状态的关系,使得问题能够以递推(分治)的方式去解决,最终合并各个拆分的小问题的解为整个问题的解。)
算法思想
从任意节点i到任意节点j的最短路径不外乎2种可能:1)直接从节点i到节点j,2)从节点i经过若干个节点k到节点j。所以,我们假设arcs(i,j)为节点i到节点j的最短路径的距离,对于每一个节点k,我们检查arcs(i,k) + arcs(k,j) < arcs(i,j)是否成立,如果成立,证明从节点i到节点k再到节点j的路径比节点i直接到节点j的路径短,我们便设置arcs(i,j) = arcs(i,k) + arcs(k,j),这样一来,当我们遍历完所有节点k,arcs(i,j)中记录的便是节点i到节点j的最短路径的距离。(由于动态规划算法在执行过程中,需要保存大量的临时状态(即小问题的解),因此它天生适用于用矩阵来作为其数据结构,因此在本算法中,我们将不使用Guava-Graph结构,而采用邻接矩阵来作为本例的数据结构)
算法分析及描述
假设现要求取如下示例图所示任意两点之间的最短路径:
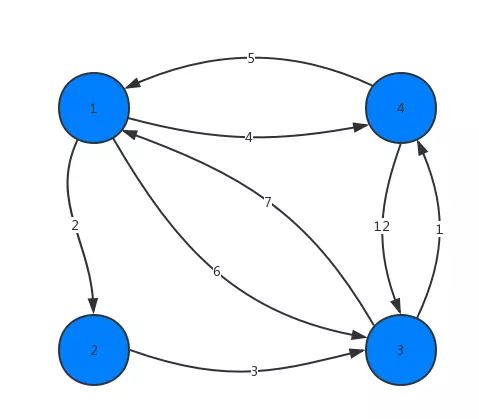
我们以一个4×4的邻接矩阵(二维数组arcs[ ][ ])作为图的数据结构。比如1号节点到2号节点的路径的权值为2,则arcs[1][2] = 2,2号节点无法直接到达4号节点,则arcs[2][4] = ∞(Integer.MAX_VALUE),则可构造如下矩阵:
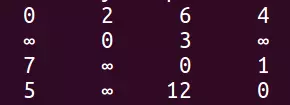
有向图的初始邻接矩阵
根据以往的经验,如果要让任意两个顶点(假设从顶点a到顶点b)之间的距离变得更短,唯一的选择就是引入第三个顶点(顶点k),并通过顶点k中转(a -> k ->b)才可能缩短顶点a到顶点b之间的距离。于是,现在的问题便分解为:求取某一个点k,使得经过中转节点k后,使得两点之间的距离可能变短,且还可能需要中转两个或者多个节点才能使两点之间的距离变短。比如图中的4号节点到3号节点(4 -> 3)的距离原本是12(arcs[4][3] = 12),如果在只通过1号节点时中转时(4 -> 1 ->3),距离将缩短为11(arcs[4][1] + arcs[1][3] = 5 + 6 = 11)。其实1号节点到3号节点也可以通过2号节点中转,使得1号到3号节点的路程缩短为5(arcs[1][2] + arcs[2][3] = 2 + 3 = 5),所以如果同时经过1号和2号两个节点中转的话,从4号节点到3号节点的距离会进一步缩短为10。于是,延伸到一般问题:
1、当不经过任意第三节点时,其最短路径为初始路径,即上图中的邻接矩阵所示。
2、当只允许经过1号节点时,求两点之间的最短路径该如何求呢?只需判断arcs[i][1]+arcs[1][j]是否比arcs[i][j]要小即可。arcs[i][j]表示的是从i号顶点到j号顶点之间的距离,arcs[i][1] + arcs[1][j]表示的是从i号顶点先到1号顶点,再从1号顶点到j号顶点的路程之和。循环遍历一遍二维数组,便可以获取在仅仅经过1号节点时的最短距离。
总结
1.Dijkstra算法是计算图中的一个点到其它点的最小路径.
算法思路: 贪心算法.
将图中所有点分成 S(已求出解)和U(未求出解)2个点集.dist[i]表示v0到v[i]当前已求得得最短路径.A[n][n]为边集
1.从剩下的边集合中选出dist最短的边并将边的另一顶点vi从U中加入S.
2.更新与vi连接的所有且并未在S中的点的dist矩阵值,dist[vk]=min(dist[vk],dist[vi]+A(i,k)).
3.重复上述操作直到U中无与S中的点相连的点.
2.Floyd算法计算图中任意一对点的最短路径.
算法思路: T(n)=O(n^3).
动态规划法: Dis(i,j) =min(Dis(i,j), Dis(i,k) + Dis(k,j)).
3.Dijkstra算法为啥不能存在负数边?
Dijkstra中S(已求出解)中的每一个点解即最短路径是已求出的,若存在负数路径,可能存在已求出的解不是最优解.
面试题

发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/140010.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
