大家好,又见面了,我是你们的朋友全栈君。
图像中噪声的来源有许多种,这些噪声来源于图像采集、传输、压缩等各个方面。噪声的种类也各不相同,比如椒盐噪声,高斯噪声等,针对不同的噪声有不同的处理算法。
对于输入的带有噪声的图像v(x),其加性噪声可以用一个方程来表示:

其中u(x)u(x)是原来没有噪声的图像。xx是像素集合,η(x)η(x)是加项噪声项,代表噪声带来的影响。ΩΩ是像素的集合,也就是整幅图像。从这个公式可以看出,噪声是直接叠加在原始图像上的,这个噪声可以是椒盐噪声、高斯噪声。理论上来说,如果能够精确地获得噪声,用输入图像减去噪声就可以恢复出原始图像。但现实往往很骨感,除非明确地知道噪声生成的方式,否则噪声很难单独求出来。
工程上,图像中的噪声常常用高斯噪声N(μ,σ2)N(μ,σ2)来近似表示,其中μ=0μ=0,σ2σ2是噪声的方差,σ2σ2越大,噪声越大。一个有效的去除高斯噪声的方式是图像求平均,对N幅相同的图像求平均的结果将使得高斯噪声的方差降低到原来的N分之一,现在效果比较好的去噪算法都是基于这一思想来进行算法设计。
NL-Means的全称是:Non-Local Means,直译过来是非局部平均,在2005年由Baudes提出,该算法使用自然图像中普遍存在的冗余信息来去噪声。与常用的双线性滤波、中值滤波等利用图像局部信息来滤波不同的是,它利用了整幅图像来进行去噪,以图像块为单位在图像中寻找相似区域,再对这些区域求平均,能够比较好地去掉图像中存在的高斯噪声。NL-Means的滤波过程可以用下面公式来表示:
在这个公式中,w(x,y)w(x,y)是一个权重,表示在原始图像vv中,像素 xx 和像素 yy 的相似度。这个权重要大于0,同时,权重的和为1,用公式表示是这样:
是像素 x 的邻域。这个公式可以这样理解:对于图像中的每一个像素 x ,去噪之后的结果等于它邻域中像素 y 的加权和,加权的权重等于 x 和y 的相似度。这个邻域也称为搜索区域,搜索区域越大,找到相似像素的机会也越大,但同时计算量也是成指数上升。在提出这个算法的文献中,这个区域是整幅图像!导致的结果是处理一幅512×512大小的图像,最少也得几分钟。
衡量像素相似度的方法有很多,最常用的是根据两个像素的亮度值的差的平方来估计。但因为有噪声的存在,单独的一个像素并不可靠。对此解决方法是,考虑它们的邻域,只有邻域相似度高才能说这两个像素的相似度高。衡量两个图像块的相似度最常用的方法是计算他们之间的欧氏距离:
其中: 是一个归一化的因子,是所有权重的和,对每个权重除以该因子后,使得权重满足和为1的条件。 h>0 是滤波系数,控制指数函数的衰减从而改变欧氏距离的权重。 V(x)和 V(y) 代表了像素 x 和像素 y 的邻域,这个邻域常称为块(Patch)邻域。块邻域一般要小于搜索区域。
是两个邻域的高斯加权欧式距离。其中 a>0 是高斯核的标准差。在求欧式距离的时候,不同位置的像素的权重是不一样的,距离块的中心越近,权重越大,距离中心越远,权重越小,权重服从高斯分布。实际计算中考虑到计算量的问题,常常采用均匀分布的权重。
讲了这么多,是时候用图来说明问题了:
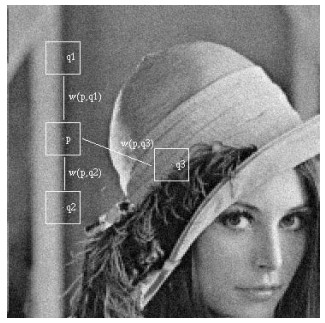
如上图所示,p为去噪的点,因为q1和q2的邻域与p相似,所以权重w(p,q1)和w(p,q2)比较大,而邻域相差比较大的点q3的权重值w(p,q3)很小。如果用一幅图把所有点的权重表示出来,那就得到下面这些权重图:
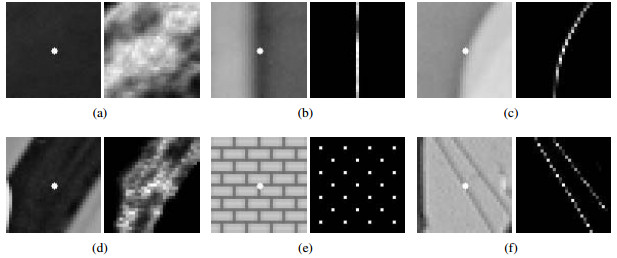
这6组图像中,左边是原图,中心的白色色块代表了像素 xx 块邻域,右边是计算出来的权重 w(x,y)w(x,y) 图,权重范围从0(黑色)到1(白色)。这个块邻域在整幅图像中移动,计算图像中其他区域跟这个块的相似度,相似度越高,得到的权重越大。最后将这些相似的像素值根据归一化之后的权重加权求和,得到的就是去噪之后的图像了。
这个算法参数的选择也有讲究,一般而言,考虑到算法复杂度,搜索区域大概取21×21,相似度比较的块的可以取7×7。实际中,常常需要根据噪声来选取合适的参数。当高斯噪声的标准差 σσ越大时,为了使算法鲁棒性更好,需要增大块区域,块区域增加同样也需要增加搜索区域。同时,滤波系数 hh 与 σσ 正相关:h=kσh=kσ,当块变大时,kk 需要适当减小。
NL-Means算法的复杂度跟图像的大小、颜色通道数、相似块的大小和搜索框的大小密切相关,设图像的大小为N××N,颜色通道数为NcNc,块的大小为k××k,搜索框的大小为n××n,那么算法复杂度为:O(N2Nck2n2)。对512××512的彩色图像而言,设置k=7,n=21,OpenCV在使用了多线程的情况下,处理一幅图像所需要的时间需要几十秒。虽然有人不断基于这个算法进行改进、提速,但离实时处理还是比较远。
最后来看一下这个算法的去噪效果[3]:



BM3D(Block-matching and 3D filtering,3维块匹配滤波)可以说是当前效果最好的算法之一。该算法的思想跟NL-Means有点类似,也是在图像中寻找相似块的方法进行滤波,但是相对于NL-Means要复杂得多,理解了NL-Means有助于理解BM3D算法。BM3D算法总共有两大步骤,分为基础估计(Step1)和最终估计(Step2):
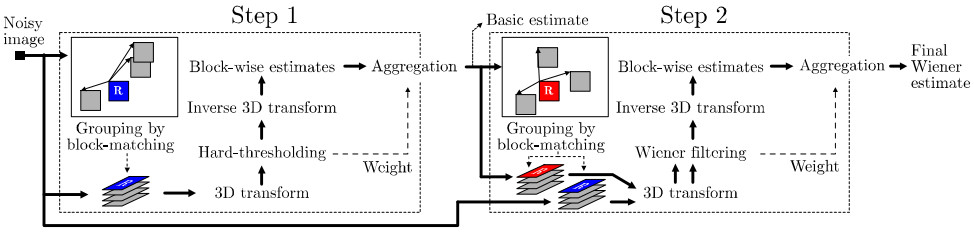
BM3D算法流程图
在这两大步中,分别又有三小步:相似块分组(Grouping),协同滤波(Collaborative Filtering)和聚合(Aggregation)。上面的算法流程图已经比较好地将这一过程表示出来了,只需要稍加解释。
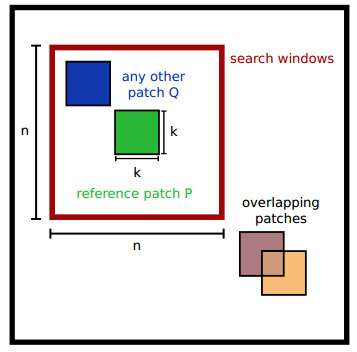
(1) Grouping:有了NL-Means的基础,寻找相似块的过程很容易理解。首先在噪声图像中选择一些k×kk×k 大小的参照块(考虑到算法复杂度,不用每个像素点都选参照块,通常隔3个像素为一个不长选取,复杂度降到1/9),在参照块的周围适当大小(n×nn×n)的区域内进行搜索,寻找若干个差异度最小的块,并把这些块整合成一个3维的矩阵,整合的顺序对结果影响不大。同时,参照块自身也要整合进3维矩阵,且差异度为0。寻找相似块这一过程可以用一个公式来表示:
Q:d(P,Q)≤τstep1}.G(P)={Q:d(P,Q)≤τstep1}.
d(P,Q)代表两个块之间的欧式距离。最终整合相似块获得的矩阵就是流程图Step1中左下角的蓝色R矩阵。
(2) Collaborative Filtering:形成若干个三维的矩阵之后,首先将每个三维矩阵中的二维的块(即噪声图中的某个块)进行二维变换,可采用小波变换或DCT变换等,通常采用小波BIOR1.5。二维变换结束后,在矩阵的第三个维度进行一维变换,通常为阿达马变换(Hadamard Transform)。变换完成后对三维矩阵进行硬阈值处理,将小于阈值的系数置0,然后通过在第三维的一维反变换和二维反变换得到处理后的图像块。这一过程同样可以用一个公式来表达:
在这个公式中,二维变换和一维变换用一个T3DhardT3Dhard 来表示。γγ是一个阈值操作:
0if|x|≤λ3Dσxotherwise.γ(x)={0if|x|≤λ3Dσxotherwise.
σσ是噪声的标准差,代表噪声的强度。
(3) Aggregation:此时,每个二维块都是对去噪图像的估计。这一步分别将这些块融合到原来的位置,每个像素的灰度值通过每个对应位置的块的值加权平均,权重取决于置0的个数和噪声强度。
(1) Grouping:第二步中的聚合过程与第一步类似,不同的是,这次将会得到两个三维数组:噪声图形成的三维矩阵Qbasic(P)Qbasic(P)和基础估计结果的三维矩阵Q(P)Q(P)。
(2) Collaborative Filtering:两个三维矩阵都进行二维和一维变换,这里的二维变换通常采用DCT变换以得到更好的效果。用维纳滤波(Wiener Filtering)将噪声图形成的三维矩阵进行系数放缩,该系数通过基础估计的三维矩阵的值以及噪声强度得出。这一过程同样可以用一个公式来表达:
在这个公式中,二维变换和一维变换用一个T3DweinT3Dwein 来表示。wpwp是一个维纳滤波的系数:
σσ是噪声的标准差,代表噪声的强度。
(3) Aggregation:与第一步中一样,这里也是将这些块融合到原来的位置,只是此时加权的权重取决于维纳滤波的系数和噪声强度。
经过最终估计之后,BM3D算法已经将原图的噪声显著地去除。可以来看一组结果:

该算法的主要运算量还是在相似块的搜索与匹配上,在与NL-Means同样大小的相似块和搜索区域的情况下,BM3D的算法复杂度是要高于NL-Means的,应该大概在NL-Means的3倍左右。梦想着实时处理的同学可以死心了。
要比较算法效果,必然离不开评价体系。由于人带有主观因素,每个人的评价可能都不一样,因此有必要用几种客观的评价方法来对结果进行评价。目前,用得比较多的评价方式是MSE(Mean-Squared Error,均方误差)和PSNR(Peak Signal-to-Noise Ratio,峰值信噪比)。
两幅M×NM×N大小的图像u(x,y)u(x,y)和v(x,y)v(x,y)的MSE计算公式如下:
在这个公式里没有表现出像素值范围对结果的影响,同样的均方误差8-bit的图像和12-bit的图像显然没有可比性。因此,又引入了峰值信噪比:
上式中,ss 是图像像素最大值,对于8-bit的图像而言 ss=255,PSNR的单位是分贝(dB)。 通常 PSNR 值越高表示品质越好,一般而言,当 PSNR<30dB 时,代表以人的肉眼看起来是不能容忍的范围。因此大部分PSNR值都要>30dB。但PSNR高,并不代表图像质量一定好,有时候还是必须要靠人的肉眼去辅助判断图像的质量才较为正确。
不同PSNR对应的视觉效果
我对上面两种方法获得的结果针对原图计算了PSNR,结果如下:
| NL-Means | BM3D | |
| PSNR | 32.0913 | 33.6711 |
NL-Means和BM3D可以说是目前效果最好的去噪算法,其中BM3D甚至宣称它可以得到迄今为止最高的PSNR。从最终的结果也可以看出来,BM3D的效果确实要好于NL-Means,噪声更少,能够更好地恢复出图像的细节。在效果这一点上BM3D胜。无愧于State-of-the-art这一称号。当然,这里进行测试的样本比较少,可能还不足以完全说明问题。
这两者可以说是目前最有效的图像去噪算法了,但是都不可避免地要面对一个同问题:尽管计算机性能已经成百上千倍地提高,还是远不能满足很多算法的实时计算的需求,这很大程度上限制了这些算法的使用范围:用户无法处理一张照片需要等待长达几分钟的时间,因此,距离真正意义上的实用还是有一段距离。我们只能期待,要是有一天计算机性能不再是问题,又或者,大牛们能够研究出又快又好的算法吧。
[1] Buades A, Coll B, Morel J M. A non-local algorithm for image denoising[C]//Computer Vision and Pattern Recognition, 2005. CVPR 2005. IEEE Computer Society Conference on. IEEE, 2005, 2: 60-65.
[2] Buades A, Coll B, Morel J M. Nonlocal image and movie denoising[J]. International journal of computer vision, 2008, 76(2): 123-139.
[3] Antoni Buades, Bartomeu Coll, and Jean-Michel Morel, Non-Local Means Denoising, Image Processing On Line, 1 (2011). http://dx.doi.org/10.5201/ipol.2011.bcm_nlm
[4] Jacques Froment, Parameter-Free Fast Pixelwise Non-Local Means Denoising, Image Processing On Line, 4 (2014), pp. 300–326. http://dx.doi.org/10.5201/ipol.2014.120
[5] Dabov K, Foi A, Katkovnik V, et al. Image denoising by sparse 3-D transform-domain collaborative filtering[J]. Image Processing, IEEE Transactions on, 2007, 16(8): 2080-2095.
[6] http://www.cs.tut.fi/~foi/GCF-BM3D/
[7] Marc Lebrun, An Analysis and Implementation of the BM3D Image Denoising Method, Image Processing On Line, 2 (2012), pp. 175–213. http://dx.doi.org/10.5201/ipol.2012.l-bm3d
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/139876.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
