大家好,又见面了,我是你们的朋友全栈君。
近期学习关键点检测相关内容,基于CNN的方法已经替代以往经典的方法(ASM,AAM等),于是乎得看看CNN是如何应用到关键点检测上的。
创新点:
1.将CNN应用到人脸关键点检测当中
2.提出级联CNN,这个级联CNN的level-1 有一个非常重要的作用,就是解决了传统人脸关键点检测时都会遇到的一个问题——关键点初始化,传统参数化方法(ASM,AAM等)若初始化不当,容易陷入局部最优。
虽然作者没有明确说这个问题,但是很明显的是,经过level-1,得到了一个相对较好的初始化。
在这方面,face++ 发表在ICCV-2013的paper(Extensive facial landmark localization with coarse-to-fine convolutional network cascade)同样有这么个“初始化”的操作。
3.借鉴别的文献中的idea:局部共享权值(locally sharing weights),理论听起来挺有道理的。传统的权值共享认为某一个特征会图像的不同位置出现,所以采用全局权值共享。但是人脸是由比较规范的结构,如人眼就是在上部,鼻子就是在中部,嘴就是在下部,因此应该采用局部权值共享。
2013年,Sun等人首次将CNN应用到人脸关键点检测,并且取得较好的结果(BioID、LFPW数据集上),今天就来看看Sun等人提出的Deep Convolutional Network Cascade,到底是如何应用到人脸关键点检测的。
Abstract
作者提出一种级联的CNN(有三个level)来检测人脸关键点,之所以此方法好,很大程度是得益于CNN可以提取全局的,“高级”(high level)的特征,以及作者精心设计的 three-level的网络结构。
Introduction
近年(2010年前后)Facial keypoint detection可分为两种方法:1 classifying search windows;2 directly predicting keypoint positions (or shape parameters)
而第一种方法需要scanning,从而很耗时。本文提出的three-level就自然属于第二种方法了。然而,以往的初始化方法是采用mean shape or shape sampled from the training set,这样初始化是很“粗糙”的,距离真实label比较“远”的初始化,这样存在一个严重的问题就是——训练过程中容易陷入局部最优。本文提出的模型中,first-level一大作用就是提取出一个比较“精准”的key point 用来初始化,从而可以避免局部最优。
后两个level的CNN,需要比first-level要浅一些,因为这两个level是“看”low-level的区域,提取的是low-level的特征,所以不需要太深。
Related work(略)
Cascaded convolutional network
Cascaded convolutional network,由三个level构成,level-1 由三个CNN组成;level-2由10个CNN组成(因为是5个point,每个point用两个CNN);level-310个CNN组成(因为是5个point,每个point用两个CNN)。每个CNN的input size还不一样,因为其作用不同,请看图。

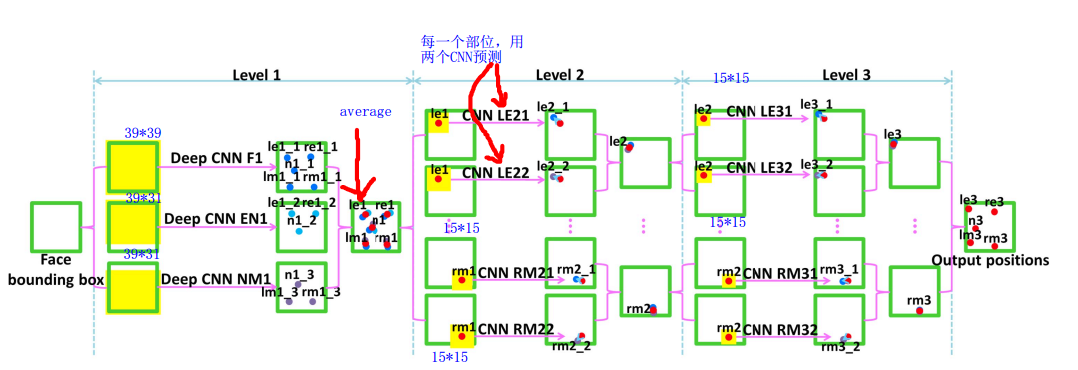
Level-1:
分三个CNN,分别是F1(face 1)、EN1(eye,nose)、NM1(nose,mouth);F1的input是39*39,输出是5个点;EN1的input是39*31,输出是3个点;NM1的input是39*31,输出是3个点。Level-1的输出是由三个CNN输出取平均得到;
在level-1中还采用了locally sharing weights,传统的权值共享认为某一个特征会图像的不同位置出现,所以采用权值共享。然而对于fixed spatial layout的任务就不应该这样做,例如人脸特征点检测,眼睛就是在上面,鼻子就是在中间,嘴巴就是在下面的。所以这里采用局部权值共享,idea源自[12](2012-CVPR Learning hierarchical representations for face verification with convolutional deep belief networks)
有兴趣的同学可以看看这篇paper,局部权值共享是怎么操作的。
Level-2:
由10个CNN构成,input size均为15*15,每两个组成一对,一个点由一对CNN进行预测,预测结果同样是采取平均。
Level-3,与Level-2类似。
一句话总结本模型:
Cascaded convolutional network,就是由粗到细的级联回归,同时借助CNN强大的特征提取能力,有效的提升了关键点检测精度。
随笔:
1. 部权值共享只是在level-1中采用,毕竟后两个level不需要
2. err计算公式:

L is the width of the bounding box returned by detector. 这里没用采用两眼距离坐归一化因子,原因参加论文[28]
Q: EN1和NM1的input size 为什么与 F1的不一样?
A: 因为F1负责5个点,是更high-level的,而EN1,NM1负责3个点
Q: 为什么选取39*39,39*31,是因为数据集的问题?
A: 实验得出的经验值
相关博客推荐:
http://blog.csdn.net/joshuaxx316/article/details/52294233
http://blog.csdn.net/xzzppp/article/details/74933489
http://blog.csdn.net/xzzppp/article/details/74932150
http://blog.csdn.net/hjimce/article/details/49955149(推荐,超详细)
胡思乱想:
1. 摘要就说,以前方法的初始化不够好,容易导致陷入局部最优,那DCNN提出级联的方式,感觉第一级就是做了个很好的初始化。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/138837.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
