大家好,又见面了,我是你们的朋友全栈君。
文章目录
1 简介
Hi,大家好,这里是丹成学长,今天向大家介绍如何使用单片机控制步进电机
大家可用于 课程设计 或 毕业设计
技术解答
毕设帮助:<Q>746876041
2 步进电机介绍
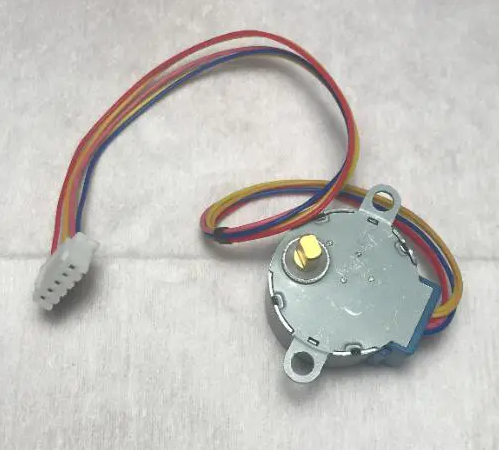
步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步进角),多用于雕刻机、3D打印机等需要精确控制的设备。本篇使用ULN2003驱动五线四相减速步进电机。

- 步进电机每次能转动的最小角度叫做步距角。
- 每当步进电机接收到一个驱动信号后,步进电机将按照一定的方向转动一个固定的角度。
- 通过控制脉冲的个数来精确的控制步进电机的角位移量,通过控制脉冲的频率来控制电机转动的速度及加速度,从而达到调速的目的。
- 步进电机按照相数不同分为单相、双相、多相三种,励磁方式分为1相励磁方式和2相励磁方式。
- 本文使用的步进电机型号为28BYJ-48,1相励磁方式驱动,通过给ABCD四相依次通电来实现转自不停转动。
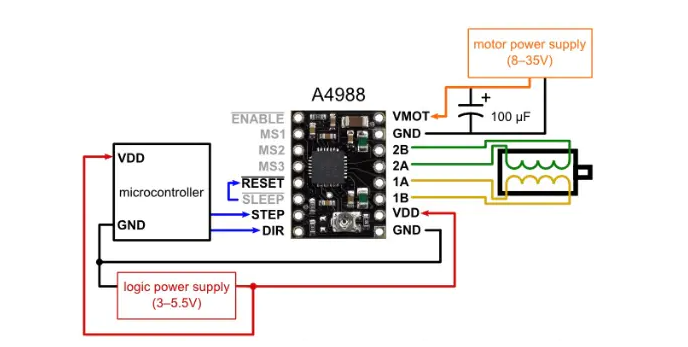
3 A4988驱动介绍
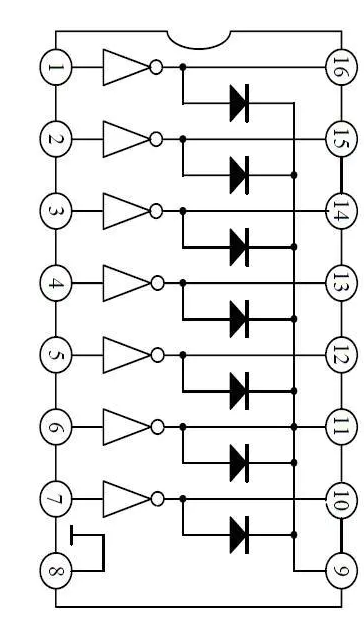
由于一般的开发板的通用IO驱动能力有限,有些外设不能直接使用IO进行驱动,需要借助一些驱动电路间接控制大功率器件。A4988是大电流驱动阵列,多用于单片机、智能仪表、PLC、数字量输出卡等控制电路中,可直接驱动继电器等负载。
4 电机启动代码
#include "a4988.h"
#include "delay.h"
/* STEP1 PDout(15) SDIR1 PGout(2) STEP2 PDout(14) SDIR2 PGout(3) STEP3 PDout(13) SDIR3 PGout(4) STEP4 PDout(12) SDIR4 PGout(5) MSTEP PDout(15) //固定芯片步进STEP MDIR PGout(2) //固定芯片步进DIR CSTEP PDout(14) //磁铁步进STEP CDIR PGout(3) //磁铁步进DIR RSTEP PDout(13) //蠕动泵STEP RDIR PGout(4) //蠕动泵DIR USTEP PDout(12) //超声步进电机STEP UDIR PGout(5) //超声步进电机DIR */
//方向脚初始化
void Step_DIR_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOG, ENABLE); //使能PG端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_5; //端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO口速度为50MHz
GPIO_Init(GPIOG, &GPIO_InitStructure); //根据设定参数初始化
GPIO_SetBits(GPIOG,GPIO_Pin_2);
GPIO_SetBits(GPIOG,GPIO_Pin_3);
GPIO_SetBits(GPIOG,GPIO_Pin_4);
GPIO_SetBits(GPIOG,GPIO_Pin_5);
}
//脉冲初始化,公用定时器4,重映射,4路频率会被一起改变
void Step_Pulse_Init(u16 arr,u16 psc)
{
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE); //使能定时器4时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD|RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外设和AFIO复用功能模块时钟
GPIO_PinRemapConfig(GPIO_Remap_TIM4, ENABLE); //Timer4重映射
//设置该引脚为复用输出功能,输出TIM4的PWM脉冲波形
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13|GPIO_Pin_14|GPIO_Pin_15; //TIM_CH4
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOD, &GPIO_InitStructure);//初始化GPIO
//!!!!!配置完复用功能后,此时输出为低电平,似乎难以修改
//初始化TIM4
TIM_TimeBaseStructure.TIM_Period = arr; //设置在下一个更新事件装入活动的自动重装载寄存器周期的值
TIM_TimeBaseStructure.TIM_Prescaler =psc; //设置用来作为TIMx时钟频率除数的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分割:TDTS = Tck_tim
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上计数模式
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure); //根据TIM_TimeBaseInitStruct中指定的参数初始化TIMx的时间基数单位
//初始化TIM4 Channel_1234 PWM模式
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //选择定时器模式:TIM脉冲宽度调制模式1
//TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比较输出使能
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Disable; //关闭比较输出使能
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //输出极性:TIM输出比较极性高
TIM_OC1Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC1
//TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR1上的预装载寄存器
TIM_OC2Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC2
//TIM_OC2PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR2上的预装载寄存器
TIM_OC3Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC3
//TIM_OC3PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR3上的预装载寄存器
TIM_OC4Init(TIM4, &TIM_OCInitStructure); //根据T指定的参数初始化外设TIM4 OC4
//TIM_OC4PreloadConfig(TIM4, TIM_OCPreload_Enable); //使能TIM4在CCR4上的预装载寄存器
TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Disable);//关闭TIM4通道1
TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Disable);//关闭TIM4通道2
TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Disable);//关闭TIM4通道3
TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Disable);//关闭TIM4通道4
TIM_Cmd(TIM4, DISABLE); //先不使能TIM4
}
//芯片电机运动
void Mstep_move(u8 dir,u16 frequency)
{
MDIR = dir;
Step_Pulse_Init((u16)(100000/frequency-1),719);
TIM_SetCompare4(TIM4,(u16)(50000/frequency));
TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Enable);//开启TIM4通道4
TIM_Cmd(TIM4, ENABLE);//必须放在最后使能
}
//芯片电机停止
void Mstep_stop(void)
{
TIM_SetCompare4(TIM4,0);
TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Disable);//关闭TIM4通道1
TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Disable);//关闭TIM4通道2
TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Disable);//关闭TIM4通道3
TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Disable);//关闭TIM4通道4
TIM_Cmd(TIM4, DISABLE);
}
//磁铁电机运动
void Cstep_move(u8 dir,u16 frequency)
{
CDIR = dir;
Step_Pulse_Init((u16)(100000/frequency-1),719);
TIM_SetCompare3(TIM4,(u16)(50000/frequency));
TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Enable);//开启TIM4通道3
TIM_Cmd(TIM4, ENABLE);//必须放在最后使能
}
//磁铁电机停止
void Cstep_stop(void)
{
TIM_SetCompare3(TIM4,0);
TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Disable);//关闭TIM4通道1
TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Disable);//关闭TIM4通道2
TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Disable);//关闭TIM4通道3
TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Disable);//关闭TIM4通道4
TIM_Cmd(TIM4, DISABLE);
}
//超声电机运动
void Ustep_move(u8 dir,u16 frequency)
{
UDIR = dir;
Step_Pulse_Init((u16)(100000/frequency-1),719);
TIM_SetCompare1(TIM4,(u16)(50000/frequency));
TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Enable);//开启TIM4通道1
TIM_Cmd(TIM4, ENABLE);//必须放在最后使能
}
//超声电机停止
void Ustep_stop(void)
{
TIM_SetCompare1(TIM4,0);
TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Disable);//关闭TIM4通道1
TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Disable);//关闭TIM4通道2
TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Disable);//关闭TIM4通道3
TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Disable);//关闭TIM4通道4
TIM_Cmd(TIM4, DISABLE);//USTEP会随波形停在高或低
}
//蠕动泵抽取
void Rstep_move(u8 dir,u16 frequency)
{
RDIR = dir;
Step_Pulse_Init((u16)(100000/frequency-1),719);
TIM_SetCompare2(TIM4,(u16)(50000/frequency));
TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Enable);//开启TIM4通道2
TIM_Cmd(TIM4, ENABLE);//必须放在最后使能
}
//蠕动泵停止
void Rstep_stop(void)
{
TIM_SetCompare2(TIM4,0);
TIM_CCxCmd(TIM4,TIM_Channel_1,TIM_CCx_Disable);//关闭TIM4通道1
TIM_CCxCmd(TIM4,TIM_Channel_2,TIM_CCx_Disable);//关闭TIM4通道2
TIM_CCxCmd(TIM4,TIM_Channel_3,TIM_CCx_Disable);//关闭TIM4通道3
TIM_CCxCmd(TIM4,TIM_Channel_4,TIM_CCx_Disable);//关闭TIM4通道4
TIM_Cmd(TIM4, DISABLE);//RSTEP会随波形停在高或低
}
5 最后
技术解答
毕设帮助:<Q>746876041
单片机毕设项目大全:
https://blog.csdn.net/huawei123444/article/details/119822845
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/138449.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
