大家好,又见面了,我是你们的朋友全栈君。
目录
前言
对于单片机开发者,调试工具就必不可少,有时需要显示波形、发送文本、数据和一些复杂的数据包。例如PID参数整定,然而四轴匿名上位都有这些功能。本文就介绍匿名四轴上位机怎么显示波形和调试,以及一些接收发送代码。
一、什么是上位机
上位机是指可以直接发出操控命令的计算机,一般是PC/host computer/master computer/upper computer,屏幕上显示各种信号变化(液压,水位,温度等)。下位机是直接控制设备获取设备状况的计算机,一般是PLC/单片机single chip microcomputer/slave computer/lower computer之类的。上位机发出的命令首先给下位机,下位机再根据此命令解释成相应时序信号直接控制相应设备。下位机不时读取设备状态数据(一般为模拟量),转换成数字信号反馈给上位机。简言之如此,实际情况千差万别,但万变不离其宗:上下位机都需要编程,都有专门的开发系统。
在概念上,控制者和提供服务者是上位机,被控制者和被服务者是下位机,也可以理解为主机和从机的关系,但上位机和下位机是可以转换的。
二、匿名四轴上位机
1、功能
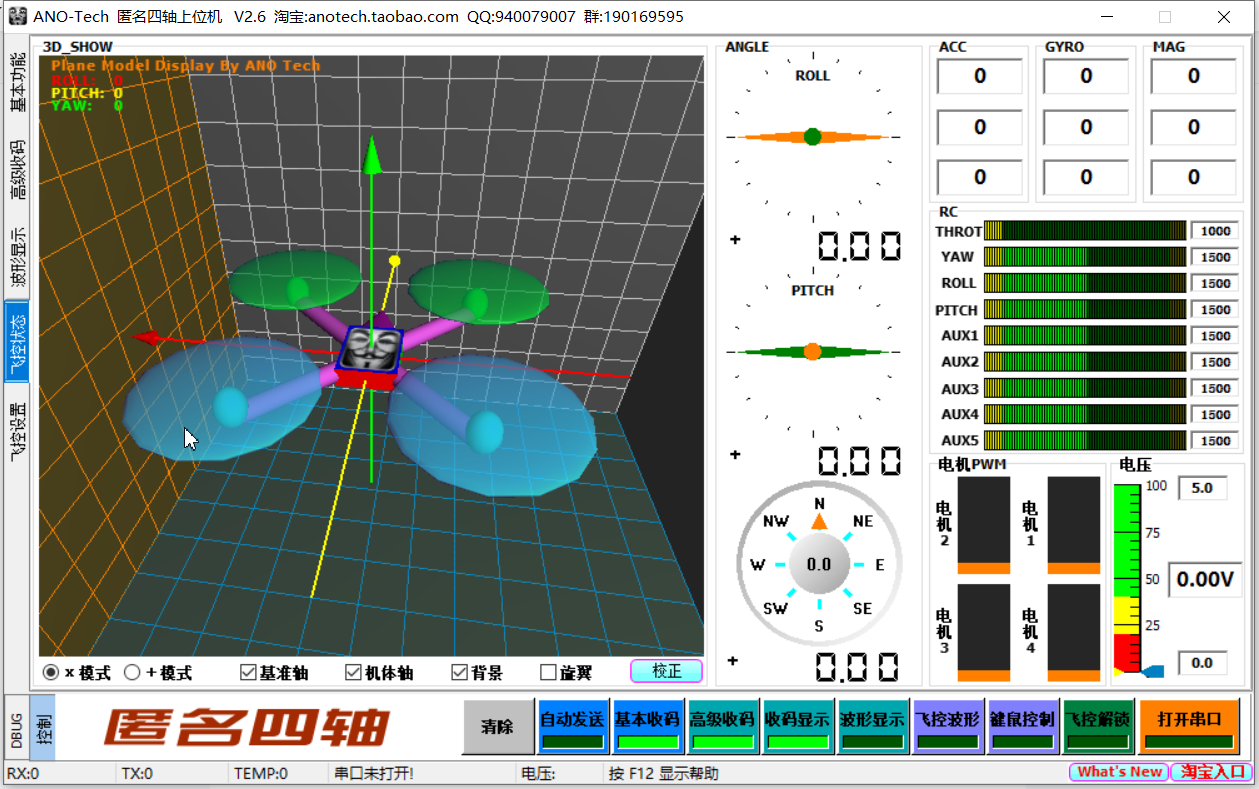
这个上位机可以基本收发(类似于串口调试助手)、高级收发收码(实现比较复杂的自定义接收和发送)、同时显示20条波形图(用于调试pid等)、调试无人机可以监视无人机的各个状态以及调试pid。
四轴匿名上位机下载链接:
http://链接:https://pan.baidu.com/s/1l6kT-LQCMQRySXpp2lrh7w 提取码:c5lq

2、软件的一些简单协议
一:基本收发
1:收码和发码格式均可设为HEX或者CHR。
2:定时发送功能可以精确到毫秒,但是不能太快(发送为独占式,数据不发送完函数不会返回),如果上一帧
数据还没发送完毕就发送下一帧数据会出错。
3:请使用ft232串口芯片或支持高波特率的芯片,否则波特率无法设置过高。
二:高级收码
1:收码显示为HEX格式。
2:下位机发送自定义数据,格式为:0x88+FUN+LEN+DATA+SUM
FUN可以是 0xA1到0xAA,共10个;LEN为DATA的长度(不包括0x88、FUN、LEN、SUM)。
SUM是0x88一直到DATA最后一字节的和,uint8格式。
(记得打开需要使用帧的开关,更改设置后点击保存设置使设置生效)
3:数据可以是uint8、int16、uint16、int32、float这几个常用格式,多字节数据高位在前。
4:共有20个数据存储器,每个存储器的数据可以分别设置为来自10个自定义帧的30个数据。
5:高速通讯时(2ms一帧数据或者更快),请关闭高级收码页面的数据显示按钮和基本收码,否则更新过快有可
能会造成程序卡死。
6:飞控显示对应的帧FUN为0xAF,(帧格式:0x88+0xAF+0x1C+ACC DATA+GYRO DATA+MAG DATA+ANGLE DATA
+ 0x00 0x00 + 0x00 0x00+SUM,共32字节,ACC/GYRO/MAG/ANGLE(roll/pitch/yaw)数据为int16格式,其
中ANGLE的roll和pitch数据为实际值乘以100以后得到的整数值,yaw为乘以10以后得到的整数值,
上位机在显示时再 除以100和10)。
7:遥控,电机pwm,电压显示对应的帧FUN为0xAE,(帧格式:0x88+0xAE+0x12+THROT YAW ROLL PITCH
+AUX1 2 3 4 5 + PWM:1 2 3 4 + VOTAGE + SUM,共28字节),数据为uint16格式,遥控数据最小在1000左右,
最大在2000左右。数据都为uint16格式,其中pwm范围1-100,votage为实际值*100。
小技巧:如果高速通讯时是为了画波形,就只开波形显示,并只保留需要观察的波形,如果是为了观察数
据,就关闭波形显示,只保留收码显示,这样可以加快程序响应速度。
7:最快通讯速度测试过下位机用500K波特率,每1ms发送32字节的数据,上位机显示其中6条波形,OK!
(有可能和电脑配置有关)
三:波形显示
1:共有20条波形,对应20个数据存储器。
2:双击波形绘制区域,可以打开波形显示开关。
3:按住Ctrl用鼠标左键点击某一条波形,可以显示数据标签,再次点击隐藏。
4:按住鼠标左键,在绘图区域从一点向右下方拖动,然后松开,可以放大显示框住的波形区域,可以多次放
大;
5:按住鼠标左键,在绘图区域从一点向左上方拖动,然后松开,可以将放大后的波形还原。
6:按住鼠标右键,在绘图区域上下左右拖动,可以移动波形。
7:显示波形时按F9键,可以打开波形高级设置。
四:DEBUG功能
1:在调试过程中可以将某些标志位、寄存器、变量实时发回上位机,并在DEBUG页面显示。
2:通讯格式为:0x88 + 0xAD + len + num + DATA + SUM, len为num与DATA的总长度,num表示要改变哪个显示
状态,例如num=0x01即是要改变第一个LED,num=0x07即是改变第一个数字输出显示。当要改变LED时,
DATA只需一字节,DATA=0x00表示关闭LED,大于0x00表示点亮LED;当要改变数字输出时,DATA需要两字
节,
表示 一个uint16数字,高字节在前。SUM为从0x88开始到SUM前一字节的和校验,uint8格式。
例如:发送 0x88 + 0xAD + 0x02 + 0x01 + 0x01 + 0x39 表示点亮第一个LED
发送 0x88 + 0xAD + 0x03 + 0x07 + 0x00 + 0x05 + 0x44 表示在第一个数字输出位置显示 5 。
五:键鼠控制
1:控制数据发送格式为:0x8A + 0x8A + 0X1C + THROT YAW ROLL PITCH AUX1 AUX2 AUX3 AUX4 AUX5 + 0x00 0x00
0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00 + SUM,遥控数据都为int16格式,中值1500,最小最大值为1000、
2000。
2:发送频率 50Hz。
3:鼠标上下控制油门,左右控制YAW,键盘的WASD控制ROLL/PITCH,键盘12345控制AUX12345。共9通道。
六:飞控参数
1:点击3D模型显示右下方的校正按钮,上位机会发送0X8A 0X8B 0X1C 0XAA 0XA3 +无用数据+SUM给下位机,
其中0X8B表示飞控参数,0XAA表示零偏,0XA3表示ACC GYRO都要校正。
2:点击飞控参数界面传感器矫正功能里面的校正按钮,分别表示ACC 和GYRO的校正,不会同时校正两个传感
器,
上位机校正ACC发送格式为:0X8A 0X8B 0X1C 0XAA 0XA1+无用数据+SUM
上位机校正GYRO发送格式为:0X8A 0X8B 0X1C 0XAA 0XA2+无用数据+SUM(送有数据整个长度都为32字节)
3:上位机发送微调后的offset数据(仅为ACC的 X 和 Y ),格式为0X8A 0X8B 0X1C 0XAB + offset.x + offset.y
+无用数据 +SUM,数据为int16格式。
4:上位机发送读offset的命令格式为:0X8A 0X8B 0X1C 0XAC + 无用数据 + SUM
5:上位机发送读PID数据的命令为:0X8A 0X8B 0X1C 0XAD + 无用数据 + SUM
6:下位机发送offset数据给上位机的格式为:0X88 0XAC 0X1C 0XAC + 传感器零偏数据ACC XYZ GYRO XYZ
+无用数据+SUM,共六个int16型数据。
7:下位机发送PID数据给上位机的格式为:0X88 0XAC 0X1C 0XAD + PID数据 + 无用数据 + SUM
PID数据为rol_p,rol_i,rol_d,pit_p..i..d,yaw_p,,i,,d,共9个uint16型数据。
8:上位机发送PID数据给下位机的格式为:0X8A 0X8B 0X1C 0XAE +PID数据+ 无用数据 + SUM
PID数据格式和下位机发送给上位机的格式一样。
9:点击飞控解锁按钮,上位机会发送0X8A 0X8B 0X1C 0XA1+无用数据+SUM给下位机,如果下位机已经解锁,
点击此按钮会发送0X8A 0X8B 0X1C 0XA0+无用数据+SUM给下位机,锁定飞控。
三、相关的接收发送代码
一、接收数据
1.接收数据流
若接收到的数据包是按协议发送的,则将数据存入RX_upcomputer数组中。
//数据的接收
#define E_START 0 //准备成功
#define E_OK 1 //成功
#define E_FRAME_HEADER_ERROR 2 //帧头错误
#define E_FRAME_RTAIL_ERROR 3 //帧尾错误
#define LINE_LIN_up 32 //数据长度
uint8_t uart_flag_up; //接收标志
vu8 RX_upcomputer[33];
void get_upcomputer_data(uint8_t data)
{
static uint8_t uart_num=0;
vu8 sum=0;
vu8 i=0;
RX_upcomputer[uart_num++]=data;
if(1==uart_num)
{
//接收到的第一个字节不为0X8A,帧头错误
if(0X8A!=RX_upcomputer[0])
{
uart_num=0;
uart_flag_up=E_FRAME_HEADER_ERROR;
}
}
if(2==uart_num)
{
//接收到的第二个字节不为0x8B,帧头错误
if(0X8B!=RX_upcomputer[1])
{
uart_num=0;
uart_flag_up=E_FRAME_HEADER_ERROR;
}
}
if(3==uart_num)
{
//接收到的第三个字节不为0X1C,帧头错误
if(0X1C!=RX_upcomputer[2])
{
uart_num=0;
uart_flag_up=E_FRAME_HEADER_ERROR;
}
}
if(LINE_LIN_up==uart_num)
{
uart_flag_up=E_OK;
//接收到的最后一个字节为校验位
for(i=0;i<LINE_LIN_up-1;i++)
sum += RX_upcomputer[i]; //校验位
if(sum==RX_upcomputer[LINE_LIN_up-1])
uart_flag_up=E_OK;
else //接收的最后一个字节校验位错误,帧尾错误
uart_flag_up=E_FRAME_RTAIL_ERROR;
uart_num=0;
}
}2.解析数据
解析存在 RX_upcomputer数组中的数据。
extern float Out_XP,Out_XI,Out_XD,In_XP,In_XI,In_XD,Out_YP,Out_YI,Out_YD,In_YP,In_YI,In_YD,ZP,ZI,ZD;
extern float out_zp;
//解析上位机发送的pid数据
void upcomputer_receive1(void)
{
In_XP=((int)RX_upcomputer[4]<<8)|RX_upcomputer[5];
In_XP=In_XP/100;
In_XI=((int)RX_upcomputer[6]<<8)|RX_upcomputer[7];
In_XI=In_XI/100;
In_XD=((int)RX_upcomputer[8]<<8)|RX_upcomputer[9];
In_XD=In_XD/100;
out_zp=((int)RX_upcomputer[10]<<8)|RX_upcomputer[11];
out_zp=out_zp/100;
In_YI=((int)RX_upcomputer[12]<<8)|RX_upcomputer[13];
In_YI=In_YI/100;
In_YD=((int)RX_upcomputer[14]<<8)|RX_upcomputer[15];
In_YD=In_YD/100;
ZP=((int)RX_upcomputer[16]<<8)|RX_upcomputer[17];
ZP=ZP/100;
ZI=((int)RX_upcomputer[18]<<8)|RX_upcomputer[19];
ZI=ZI/100;
ZD=((int)RX_upcomputer[20]<<8)|RX_upcomputer[21];
ZD=ZD/100;
}
//解析上位机微调后的offset
int offset_x,offset_y;
void upcomputer_receive2(void)
{
offset_x=((int)RX_upcomputer[4]<<8)|RX_upcomputer[5];
offset_y=((int)RX_upcomputer[6]<<8)|RX_upcomputer[7];
}2.发送数据
void usart1_SendByte(u8 data){ /* 发送字节数据到UART */ USART_SendData(USART1,data); /*等待发送寄存器为空 */ while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);}/****************** 发送八位数组************************/void usart1_SendArray(vu8 *array, uint16_t num){ vu8 i; for(i=0; i<num; i++) { /* ·发送一个字节数据到USART */ usart1_SendByte(array[i]); } /* 等待发送完成 */ while(USART_GetFlagStatus(USART1,USART_FLAG_TC)==RESET);}vu8 testdatatosend[50];/*波形显示函数*/void Test_Send_User(uint16_t data1, uint16_t data2, uint16_t data3,uint16_t data4,uint16_t data5,uint16_t data6,uint16_t data7,uint16_t data8,uint16_t data9,uint16_t data10){ vu8 _cnt=0; vu8 sum=0; vu8 i=0; testdatatosend[_cnt++]=0x88; testdatatosend[_cnt++]=0xA1; testdatatosend[_cnt++]=0; testdatatosend[_cnt++]=data1>>8; testdatatosend[_cnt++]=data1&0xff; testdatatosend[_cnt++]=data2>>8; testdatatosend[_cnt++]=data2&0xff; testdatatosend[_cnt++]=data3>>8; testdatatosend[_cnt++]=data3&0xff; testdatatosend[_cnt++]=data4>>8; testdatatosend[_cnt++]=data4&0xff; testdatatosend[_cnt++]=data5>>8; testdatatosend[_cnt++]=data5&0xff; testdatatosend[_cnt++]=data6>>8; testdatatosend[_cnt++]=data6&0xff; testdatatosend[_cnt++]=data7>>8; testdatatosend[_cnt++]=data7&0xff; testdatatosend[_cnt++]=data8>>8; testdatatosend[_cnt++]=data8&0xff; testdatatosend[_cnt++]=data9>>8; testdatatosend[_cnt++]=data9&0xff; testdatatosend[_cnt++]=data10>>8; testdatatosend[_cnt++]=data10&0xff; testdatatosend[2] = _cnt-3; for(i=0;i<_cnt;i++) sum += testdatatosend[i]; testdatatosend[_cnt++]=sum; usart1_SendArray(testdatatosend,_cnt);}/******************************************************************************************下面的函数主要用于无人机调试,也可用于其他pid调试****************************************************************************************//*发送陀螺仪数据给上位机*/void Test_Send_User1(int16_t acc_x_,int16_t acc_y_,int16_t acc_z_,int16_t gyro_x_,int16_t gyro_y_,int16_t gyro_z_,int16_t roll_,int16_t pitch_,int16_t yaw_){ vu8 _cnt=0; vu8 sum=0; vu8 i=0; testdatatosend[_cnt++]=0x88; testdatatosend[_cnt++]=0xAF; testdatatosend[_cnt++]=0x1C; testdatatosend[_cnt++]=acc_x_>>8; // testdatatosend[_cnt++]=acc_x_&0xff; // testdatatosend[_cnt++]=acc_y_>>8; testdatatosend[_cnt++]=acc_y_&0xff; testdatatosend[_cnt++]=acc_z_>>8; testdatatosend[_cnt++]=acc_z_&0xff; testdatatosend[_cnt++]=gyro_x_>>8; testdatatosend[_cnt++]=gyro_x_&0xff; testdatatosend[_cnt++]=gyro_y_>>8; testdatatosend[_cnt++]=gyro_y_&0xff; testdatatosend[_cnt++]=gyro_z_>>8; testdatatosend[_cnt++]=gyro_z_&0xff; testdatatosend[_cnt++]=0; testdatatosend[_cnt++]=0; testdatatosend[_cnt++]=0; testdatatosend[_cnt++]=0; testdatatosend[_cnt++]=0; testdatatosend[_cnt++]=0; testdatatosend[_cnt++]=roll_>>8; testdatatosend[_cnt++]=roll_&0xff; testdatatosend[_cnt++]=pitch_>>8; testdatatosend[_cnt++]=pitch_&0xff; testdatatosend[_cnt++]=yaw_>>8; testdatatosend[_cnt++]=yaw_&0xff; testdatatosend[_cnt++]=0x00; testdatatosend[_cnt++]=0x00; testdatatosend[_cnt++]=0x00; testdatatosend[_cnt++]=0x00; testdatatosend[2] = _cnt-3; for(i=0;i<_cnt;i++) sum += testdatatosend[i]; testdatatosend[_cnt++]=sum; usart1_SendArray(testdatatosend,_cnt); }/*发送电机pwm和飞控电池电压给上位机*/void Test_Send_User2(uint16_t throt,uint16_t yaw_2,uint16_t roll_2,uint16_t pitch_2,uint16_t aux_1,uint16_t aux_2,uint16_t aux_3,uint16_t aux_4,uint16_t aux_5,uint16_t pwm1,uint16_t pwm2,uint16_t pwm3,uint16_t pwm4,uint16_t votage){ vu8 _cnt=0; vu8 sum=0; vu8 i=0; testdatatosend[_cnt++]=0x88; testdatatosend[_cnt++]=0xAE; testdatatosend[_cnt++]=0x12; testdatatosend[_cnt++]=throt>>8; testdatatosend[_cnt++]=throt&0xff; testdatatosend[_cnt++]=yaw_2>>8; // testdatatosend[_cnt++]=yaw_2&0xff; // testdatatosend[_cnt++]=roll_2>>8; testdatatosend[_cnt++]=roll_2&0xff; testdatatosend[_cnt++]=pitch_2>>8; testdatatosend[_cnt++]=pitch_2&0xff; testdatatosend[_cnt++]=aux_1>>8; testdatatosend[_cnt++]=aux_1&0xff; testdatatosend[_cnt++]=aux_2>>8; testdatatosend[_cnt++]=aux_2&0xff; testdatatosend[_cnt++]=aux_3>>8; testdatatosend[_cnt++]=aux_3&0xff; testdatatosend[_cnt++]=aux_4>>8; testdatatosend[_cnt++]=aux_4&0xff; testdatatosend[_cnt++]=aux_5>>8; testdatatosend[_cnt++]=aux_5&0xff; testdatatosend[_cnt++]=pwm1>>8; testdatatosend[_cnt++]=pwm1&0xff; testdatatosend[_cnt++]=pwm2>>8; testdatatosend[_cnt++]=pwm2&0xff; testdatatosend[_cnt++]=pwm3>>8; testdatatosend[_cnt++]=pwm3&0xff; testdatatosend[_cnt++]=pwm4>>8; testdatatosend[_cnt++]=pwm4&0xff; testdatatosend[_cnt++]=votage>>8; testdatatosend[_cnt++]=votage&0xff; testdatatosend[2] = _cnt-3; for(i=0;i<_cnt;i++) sum += testdatatosend[i]; testdatatosend[_cnt++]=sum; usart1_SendArray(testdatatosend,_cnt); }/*发送OFFSET给上位机*/void Test_Send_User3(int16_t acc_x_3,int16_t acc_y_3,int16_t acc_z_3,int16_t gyro_x_3,int16_t gyro_y_3,int16_t gyro_z_3){ vu8 _cnt=0; vu8 sum=0; vu8 i=0; testdatatosend[_cnt++]=0x88; testdatatosend[_cnt++]=0xAC; testdatatosend[_cnt++]=0x1C; testdatatosend[_cnt++]=0xAC; testdatatosend[_cnt++]=acc_x_3>>8; testdatatosend[_cnt++]=acc_x_3&0xff; testdatatosend[_cnt++]=acc_y_3>>8; // testdatatosend[_cnt++]=acc_y_3&0xff; // testdatatosend[_cnt++]=acc_z_3>>8; testdatatosend[_cnt++]=acc_z_3&0xff; testdatatosend[_cnt++]=gyro_x_3>>8; testdatatosend[_cnt++]=gyro_x_3&0xff; testdatatosend[_cnt++]=gyro_y_3>>8; testdatatosend[_cnt++]=gyro_y_3&0xff; testdatatosend[_cnt++]=gyro_z_3>>8; testdatatosend[_cnt++]=gyro_z_3&0xff; //testdatatosend[2] = _cnt-3; for(i=0;i<_cnt;i++) sum += testdatatosend[i]; testdatatosend[31]=sum; usart1_SendArray(testdatatosend,32); }//给上位机发送PID参数*/void Test_Send_User4(uint16_t rol_p,uint16_t rol_i,uint16_t rol_d,uint16_t pit_p,uint16_t pit_i,uint16_t pit_d,uint16_t yaw_p,uint16_t yaw_i,uint16_t yaw_d){ vu8 _cnt=0; vu8 sum=0; vu8 i=0; testdatatosend[_cnt++]=0x88; testdatatosend[_cnt++]=0xAC; testdatatosend[_cnt++]=0x1C; testdatatosend[_cnt++]=0xAD; testdatatosend[_cnt++]=rol_p>>8; testdatatosend[_cnt++]=rol_p&0xff; testdatatosend[_cnt++]=rol_i>>8; // testdatatosend[_cnt++]=rol_i&0xff; // testdatatosend[_cnt++]=rol_d>>8; testdatatosend[_cnt++]=rol_d&0xff; testdatatosend[_cnt++]=pit_p>>8; testdatatosend[_cnt++]=pit_p&0xff; testdatatosend[_cnt++]=pit_i>>8; testdatatosend[_cnt++]=pit_i&0xff; testdatatosend[_cnt++]=pit_d>>8; testdatatosend[_cnt++]=pit_d&0xff; testdatatosend[_cnt++]=yaw_p>>8; testdatatosend[_cnt++]=yaw_p&0xff; testdatatosend[_cnt++]=yaw_i>>8; testdatatosend[_cnt++]=yaw_i&0xff; testdatatosend[_cnt++]=yaw_d>>8; testdatatosend[_cnt++]=yaw_d&0xff; // testdatatosend[2] = _cnt-3; for(i=0;i<_cnt;i++) sum += testdatatosend[i]; testdatatosend[31]=sum; usart1_SendArray(testdatatosend,32); }总结
以上就是今天讲的内容,四轴匿名上位机的使用、协议和一些接收发送代码。
这是我的学习总结,若有不当之处,欢迎指出。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/138282.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
