大家好,又见面了,我是你们的朋友全栈君。
基于51单片机控制步进电机正反转
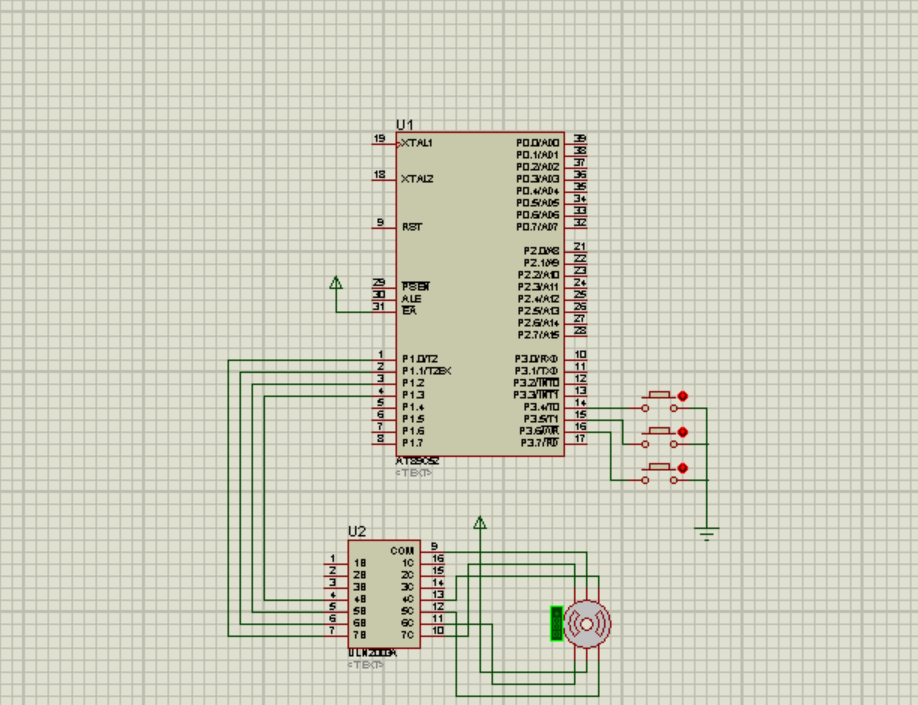
此次采用uln2003模块来链接步进电机;
## 步进电机工作原理
步进电机是一种将电脉冲信号转换成相应角位移或线位移的电动机。每输入一个脉冲信号,转子就转动一个角度或前进一步,其输出的角位移或线位移与输入的脉冲数成正比,转速与脉冲频率成正比。
步进电动机的结构形式和分类方法较多,一般按励磁方式分为磁阻式、永磁式和混磁式三种;按相数可分为单相、两相、三相和多相等形式。
因此我们可以控制单片机I/O口的电平来控制步进电机,此次设计中采用四相单拍工作方式,在这种工作方式下,A、B、C、D 三相轮流通电,电流切换三次,磁场旋转一周,转子向前转过一个齿距角。因此这种通电方式叫做四相单四拍工作方式。
- 电机正转代码 unsigned char code tableZ[8]={0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09};
- 电机反转代码 unsigned char code tableF[8]={0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08};
代码如下
#include <reg52.h>
#define uint unsigned int
#define uchar unsigned char
unsigned char code tableZ[8]={
0x08,0x0c,0x04,0x06,0x02,0x03,0x01,0x09};
unsigned char code tableF[8]={
0x09,0x01,0x03,0x02,0x06,0x04,0x0c,0x08};//²½½øµç»úzheng
void delay(unsigned int t);
sbit S3=P3^4; //反转
sbit S4=P3^5; //反停
sbit S5=P3^6; // 正停
//正转写入数据
void motor_z()
{
unsigned char i,j;
for (i=0; i<8; i++)
{
if(S5==0){
break;}
for(j=0;j<8;j++){
P1 = tableZ[i]&0x1f;
delay(50);
}
}
}
//反转写入数据
void motor_f(){
unsigned char i,j;
for (i=0; i<8; i++)
{
if(S4==0){
break;}
for(j=0;j<8;j++){
P1 = tableF[i]&0x1f;
delay(50);
}
}
}
void delay(unsigned int t)//延时函数
{
unsigned int k;
while(t--)
{
for(k=0; k<60; k++)
{
}
}
}
void main()
{
while(1){
motor_z();
if(S3 == 0){
motor_f();
}
}
}
protel仿真图如下

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/138089.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
