大家好,又见面了,我是你们的朋友全栈君。
本来接触单片机挺久了的,但是一直只是停留在非常初级的认识阶段,本科的时候上过几门课,但是从来没有自己捣鼓过单片机,这次突然来了兴趣,感觉一下子学到了好多东西,在这里好好整理一下。这篇文章只适合于入门阶段的小白阅读,高手请绕道。
12年年初的时候购买了一套普中科技的“单片机开发试验仪”,好多次想好好学学,结果每一次都半途而废,主要原因还是周围的人都不会用,有问题都不知道找谁问,结果锁到箱子里一直到现在。因为最近需要用到一个步进电机,而这个步进电机需要用PWM波控制。以前也用过电机,直流无刷的、交流伺服等等,但是都是RS232、RS485或者Can总线协议,从来没有用PWM波控制过。废话不多说,直接入正题。
硬件
单片机型号:STC90C516RD+
步进电机型号:39HS4012A4 1.8° 1.2A

步进电机驱动器型号:M415B 1.5A

代码
源代码
#include <reg52.h>
unsigned char timer1;
sbit DIR=P1^0; //位定义DIR为P1.0口
sbit ENA=P1^1; //位定义ENA为P1.1口
sbit PWM=P1^2; //位定义PWM为P1.2口
void system_Ini()
{
TMOD|= 0x11;
TH1 = 0xfe; //11.0592MHz 0.5ms定时
TL1 = 0x33;
TR1 = 1; //启动T1定时
IE =0x8A; //开T0,T1中断,开总中断
}
main()
{
system_Ini(); //调用子函数,初始化定时器T1
while(1)
{
if(timer1>100)
{
timer1=0; //输出占空比0.7的PWM脉冲
}
if(timer1<30)
{
PWM=0;
}
else
{
PWM=1;
}
}
}
/************************************* [ t1 (0.5ms)中断] 中断中做 PWM 输出 ------------1000/(0.02ms*250)=200Hz *************************************/
void T1zd(void) interrupt 3 //3 为定时器1的中断号 1 定时器0的中断号 0 外部中断1 2 外部中断2 4 串口中断
{
TH1 = 0xfe; //11.0592 初始化定时器
TL1 = 0x33;
timer1++; //计数+1
}代码解释
#include <reg52.h> //包含了单片机系统的头文件
unsigned char timer1; //定义一个无符号字符常量timer1,用来给定时器计数用
sbit DIR=P1^0; //位定义DIR为P1.0口,用来控制步进电机的方向
sbit ENA=P1^1; //位定义ENA为P1.1口,用来控制步进电机的使能
sbit PWM=P1^2; //位定义PWM为P1.1口,用来输出PWM波
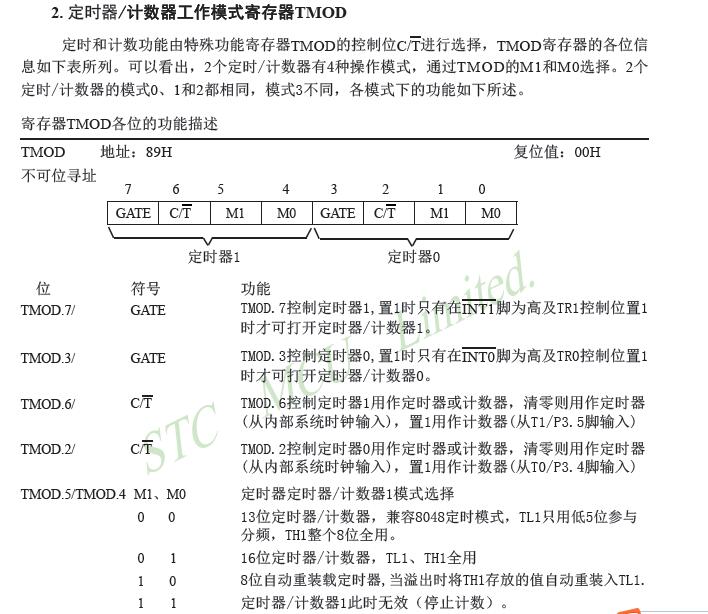
TMOD = 0x11;
//这一句代码比较费解,因为对单片机的控制字不熟悉,仔细翻看了单片机的手册,原来这是控制定时器的,共有两位,前一位控制定时器1,后一位控制定时器0。因为控制只使用了一个定时器1,所以其实定时器0所在的位其实无关紧要。控制位的定义如下图所示,共4位,组成一个16进制数,所以代码中的1其实铺开了二进制应该是0001,对应下面的16位定时器,TL1、TH1全用。
TH1 = 0xfe; //11.0592MHz 0.5ms定时
TL1 = 0x33;
//这句代码非常的费解,刚开始的时候完全不懂这两个数索要表示的意思是什么,旁边还有个注释,也是没看懂。好在实验室有一位大神,分分钟帮我讲懂了。先看芯片手册上给出的例子:
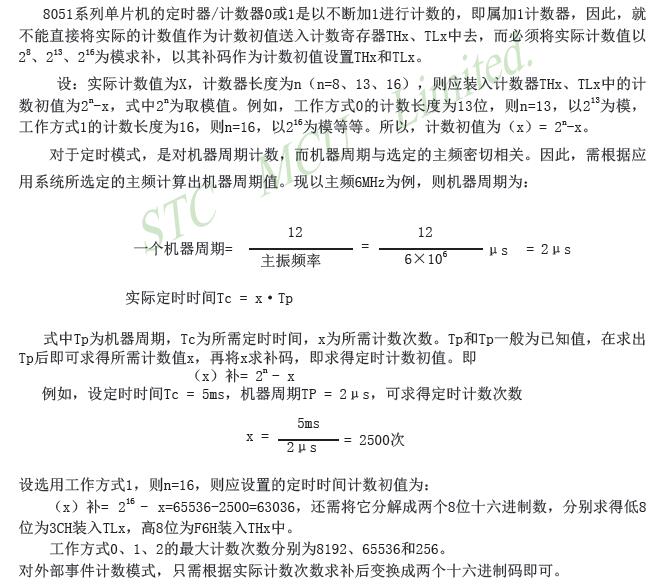

//也就是说初始时我的计数是从0xfe33开始的,定时器是16位的,所以实际计数值化为十进制为:
216−(15×163+14×162+3×161+3×160)=461
//也就是说实际上计数为461,而实际上我查得我的晶振频率为11.907MHz,所以实际的时间长度为:
Tc=461×1211.907×106=0.4646
//也就是说实际的定时器定时464.6ms,这里终于解释清楚了为什么上面的定时器数据应该那么写
TR1 = 1; //启动T1定时,这里比较好理解
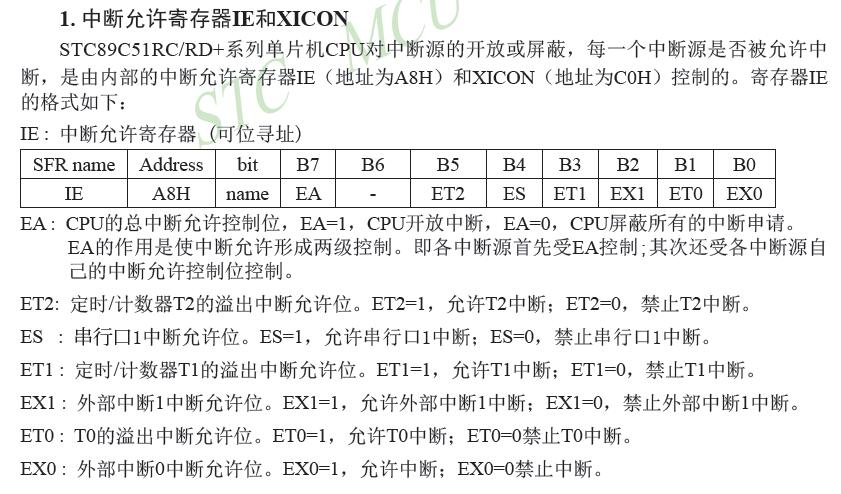
IE =0x8A; //开T0,T1中断,开总中断
//这里继续翻出芯片的技术手册来解释,有了前面的基础,后面看起来自然一目了然,必须允许定时器溢出中断,定时器每溢出一次就产生一次中断,总中断是必须打开的,用了定时器1,因此定时器1的中断也需要打开,而定时器0的中断其实开不开无所谓的,因为根本就没有用定时器0。
main()
{
system_Ini(); //调用子函数,初始化定时器T1
while(1) //无限循环
{
if(timer1>100)
{
timer1=0; //输出占空比0.7的PWM脉冲
}
if(timer1<30)
{
PWM=0;
}
else
{
PWM=1;
}
}
}
/************************************* [ t1 (0.5ms)中断] 中断中做 PWM 输出 1000/(0.02ms*250)=200Hz *************************************/
void T1zd(void) interrupt 3 //3为定时器1的中断号; 1为定时器0的中断号; 0为外部中断1的中断号; 2为外部中断2的中断号; 4为串口中断的中断号,这是芯片规定的
{
TH1 = 0xfe; //11.0592 初始化定时器,让定时器复位继续定时
TL1 = 0x33;
timer1++; //计数+1
}版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/138008.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
