大家好,又见面了,我是你们的朋友全栈君。
激光测距粗划分为两种
第一种原理大致是光速和往返时间的乘积的一半,就是测距仪和被测量物体之间的距离,以激光测距仪为例;
第二种是以激光位移传感器原理为原理的方法的。
激光的测量方法
激光的测量方法大致有三种,脉冲法(激光回波法),相位法,三角反射法。
- 脉冲法测量距离的精度一般是在+/- 1米左右。另外,此类测距仪的测量盲区一般是15米左右。( 激光回波分析法则用于远距离测量。)
- 三角法用来测量2000mm以下短程距离(行业称之为位移)时,精度最高可达1um。
- 相位式激光测距一般应用在精密测距中,精度一般为毫米级。
1.第一类测距
如果光以速度c在空气中传播在A、B两点间往返一次所需时间为t,则A、B两点间距离D可用下列表示。
D=ct/2
式中:
D——测站点A、B两点间距离;
c——光在大气中传播的速度;
t——光往返A、B一次所需的时间。
由上式可知,要测量A、B距离实际上是要测量光传播的时间t,根据测量时间方法的不同,激光测距仪通常可分为脉冲式和相位式两种测量形式。
2 .第二类测距
激光位移传感器能够利用激光的高方向性、高单色性和高亮度等特点可实现无接触远距离测量。激光位移传感器(磁致伸缩位移传感器)就是利用激光的这些优点制成的新型测量仪表,它的出现,使位移测量的精度、可靠性得到极大的提高,也为非接触位移测量提供了有效的测量方法。
按照测量原理,激光位移传感器原理分为激光三角测量法和激光回波分析法,激光三角测量法一般适用于高精度、短距离的测量,而激光回波分析法则用于远距离测量。
3.测量方法一:相位式激光测距
相位式激光测距仪是用无线电波段的频率,对激光束进行幅度调制并测定调制光往返测线一次所产生的相位延迟,再根据调制光的波长,换算此相位延迟所代表的距离。即用间接方法测定出光经往返测线所需的时间。
若调制光角频率为ω,在待测量距离D上往返一次产生的相位延迟为φ,则对应时间t 可表示为:
t=φ/ω 式3.1
将此关系代入(1.1)式距离D可表示为
D=1/2 ct=1/2 c·φ/ω=c/(4πf) (Nπ+Δφ) = c/4f (N+ ΔN )=U(N+) 式3.2
式中:
φ——信号往返测线一次产生的总的相位延迟。
ω——调制信号的角频率,ω=2πf。
U——单位长度,数值等于1/4调制波长
N——测线所包含调制半波长个数。
Δφ——信号往返测线一次产生相位延迟不足π部分。
ΔN——测线所包含调制波不足半波长的小数部分。
ΔN=φ/ω
在给定调制和标准大气条件下,频率c/(4πf)是一个常数,此时距离的测量变成了测线所包含半波长个数的测量和不足半波长的小数部分的测量即测N或φ,由于近代精密机械加工技术和无线电测相技术的发展,已使φ的测量达到很高的精度。
为了测得不足π的相角φ,可以通过不同的方法来进行测量,通常应用最多的是延迟测相和数字测相,目前短程激光测距仪均采用数字测相原理来求得φ。
由上所述一般情况下相位式激光测距仪使用连续发射带调制信号的激光束,为了获得测距高精度还需配置合作目标,而目前推出的手持式激光测距仪是脉冲式激光测距仪中又一新型测距仪,它不仅体积小、重量轻,还采用数字测相脉冲展宽细分技术,无需合作目标即可达到毫米级精度,测程已经超过100m,且能快速准确地直接显示距离。是短程精度精密工程测量、房屋建筑面积测量中最新型的长度计量标准器具。现应用最多的是leica公司生产的DISTO系列手持式激光测距仪。
4 测量方法二:脉冲式激光测距
脉冲激光测距简单来说就是针对激光的飞行时间差进行测距,它是利用激光脉冲持续时间极短,能量在时间上相对集中,瞬时功率很大的特点进行测距。在有合作目标时,可以达到很远的测程;在近距离测量(几千米内)即使没有合作目标,在精度要求不高的情况下也可以进行测距。该方法主要用于地形测量,战术前沿测距,导弹运行轨道跟踪,激光雷达测距,以及人造卫星、地月距离测量等。
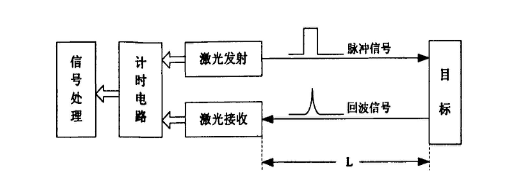

图4.1脉冲式激光测距原理图
脉冲式激光测距原理如图4.1所示。由激光发射系统发出一个持续时间极短的脉冲激光,经过待测距离L之后,被目标物体反射,发射脉冲激光信号被激光接收系统中的光电探测器接收,时间间隔电路通过计算激光发射和回波信号到达之间的时间t,得出目标物体与发射出的距离L。
其精度取决于:激光脉冲的上升沿、接收通道带宽、探测器信噪比和时间间隔精确度。
5 测量方法三:三角法激光测距
激光位移传感器的测量方法称为激光三角反射法,激光测距仪的精度是一定的,同样的测距仪测10米与100米的精度是一样的。而激光三角反射法测量精度是跟量程相关的,量程越大,精度越低。
激光测距的另一种原理是激光三角反射法原理:半导体激光器1被镜片2聚焦到被测物体6。反射光被镜片3收集,投射到CCD阵列4上;信号处理器5通过三角函数计算阵列4上的光点位置得到距物体的距离。
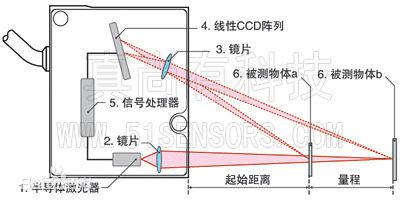
图5.1激光三角法
激光发射器通过镜头将可见红色激光射向物体表面,经物体反射的激光通过接受器镜头,被内部的CCD线性相机接受,根据不同的距离,CCD线性相机可以在不同的角度下“看见”这个光点。根据这个角度即知的激光和相机之间的距离,数字信号处理器就能计算出传感器和被测物之间的距离。
同时,光束在接收元件的位置通过模拟和数字电路处理,并通过微处理器分析,计算出相应的输出值,并在用户设定的模拟量窗口内,按比例输出标准数据信号。如果使用开关量输出,则在设定的窗口内导通,窗口之外截止。另外,模拟量与开关量输出可设置独立检测窗口。
常用在铁轨、产品厚度、平整度、尺寸等方面。
6 测量方法四:激光回波法
激光位移传感器采用回波分析原理来测量距离可以达到一定程度的精度。传感器内部是由处理器单元、回波处理单元、激光发射器、激光接受器等部分组成。激光位移传感器通过激光发射器每秒发射一百万个脉冲到检测物并返回至接收器,处理器计算激光脉冲遇到检测物并返回接收器所需时间,以此计算出距离值,该输出值是将上千次的测量结果进行的平均输出。

图6.1 激光回波法
其原理与脉冲式激光测距类似,又称脉冲回波法,用于激光位移传感器。
7“安全”和“不安全”
目前,市场上的手持式激光测距仪的工作物质主要有以下几种:工作波长为905纳米和1540纳米的半导体激光,工作波长为1064纳米的YAG激光。1064纳米的波长对人体皮肤和眼睛是害的,特别是如果眼睛不小心接触到了1064纳米波长的激光,对眼睛的伤害可能将是永久性的。所以,在国外,手持激光测距仪中,完全取缔了1064纳米的激光。在国内,某些厂家还有生产1064纳米的激光测距仪。
对于905纳米和1540纳米的激光测距仪,我们就称之为“安全”的。对于1064纳米的激光测距仪,由于它对人体具有潜在的危害性,所以我们就称之为“不安全”的。
参考链接:
http://www.chinabaike.com/t/9675/2013/1104/1701968.html
http://www.docin.com/p-620029816.html
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/136938.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
