大家好,又见面了,我是你们的朋友全栈君。
目录
一、PID控制原理与程序流程
1、过程控制
对生产过程某一或某些物理参数进行自动控制。
模拟控制系统:

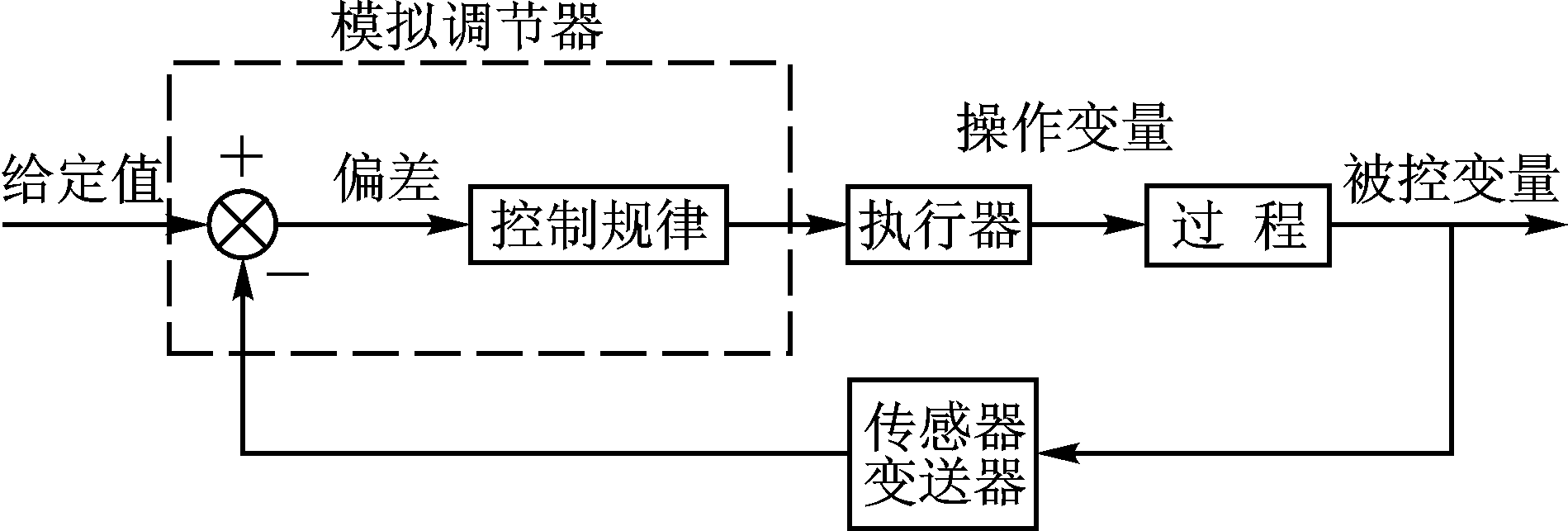
图1-1 基本模拟反馈控制回路
被控量的值由传感器或变送器来检测,这个值与给定值进行比较,得到偏差,模拟调节器按照一定控制规律使操作变量变化,以使偏差趋近于零,其输出通过执行器作用于过程。
微机过程控制系统:
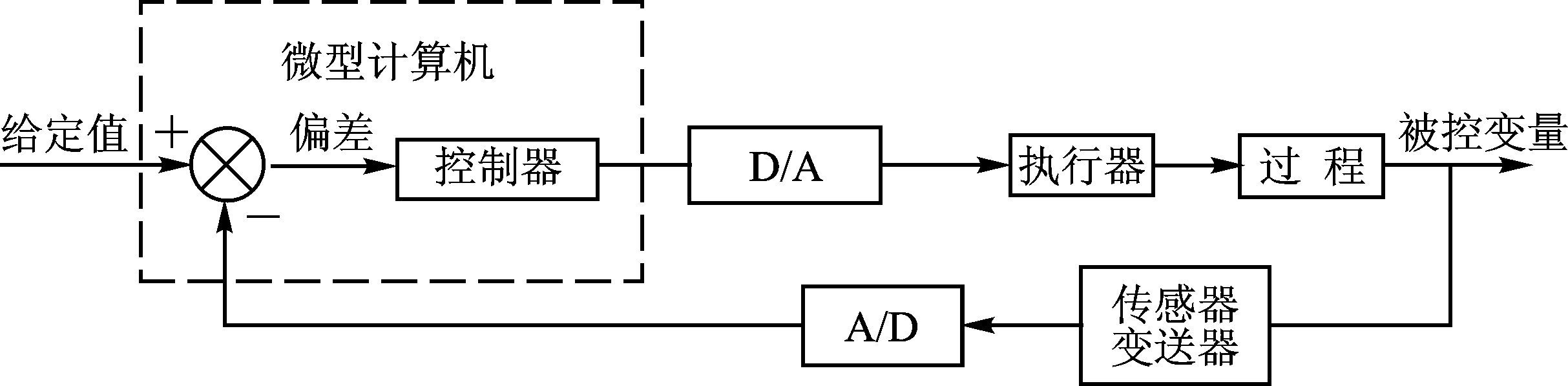
图1-2 微机过程控制系统原理图
以微型计算机作为控制器,控制规律的实现,是通过软件来完成的。改变控制规律,只要改变相应的程序即可。
模拟PID调节器:
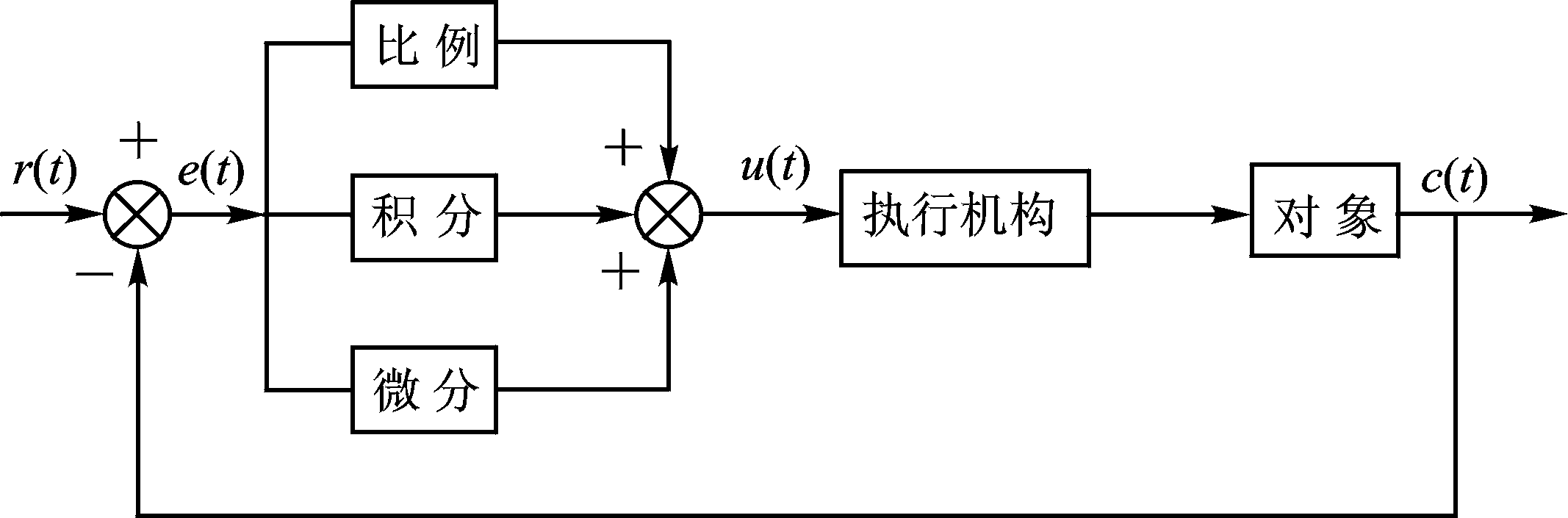
图1 模拟PID控制系统原理框图
PID调节器是一种线性调节器,它将给定的r(t)的值与实际输出的c(t)的偏差的比例(P)、积分(I)、微分(D)通过线性组合构成控制量,对控制对象进行控制。
(1)、PID调节器的微分方程

式中 e(t) = r(t) – c(t)
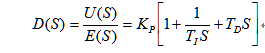
(2)、PID调节器的传输函数
2、PID调节各个单元的作用
(1)、比例单元P:即时成比例地反应控制系统的偏差信号e(t),偏差一旦产生,调节器立即产生控制作用以减小偏差。
(2)、积分单元I:主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数TI,TI越大,积分作用越弱,反之则越强。
(3)、微分单元D:能反应偏差信号的变化趋势(变化速率),并能在偏差信号的值变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减小调节时间。
二、数字PID控制器
1、模拟PID控制规律的离散化
表1 模拟形式与离散化形式
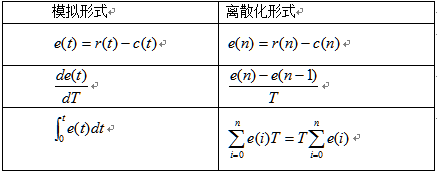
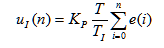
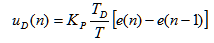
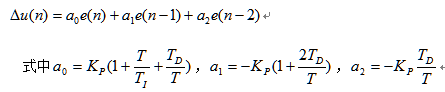
2、数字PID控制器的差分方程

式中 称为比例项

称为积分项
称为微分项
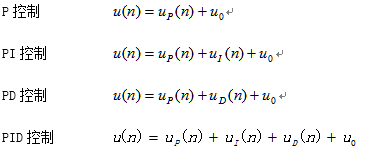
3、常见的控制方式
4、PID算法的两种形式
(1)、位置型控制


图3 位置型PID控制流程图
(2)、增量型控制


图4 增量型PID控制流程图
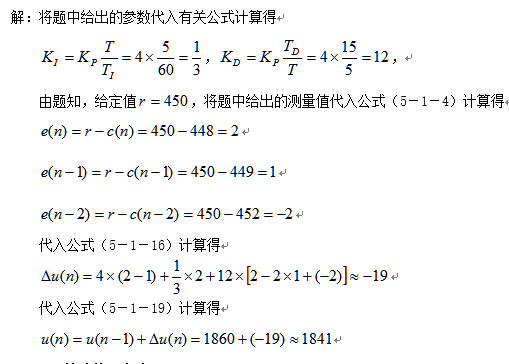
例:设有一温度控制系统,温度测量范围是0~600℃,温度采用PID控制,控制指标为450±2℃。已知比例系数Kp=4,积分时间Ti=60s,微分时间Td=5s,采样周期T=5s。当测量值c(n)=448,c(n-1)=449,c(n-2)=442时,计算增量输出

。若u(n-1)=1860,计算第n次阀位输出u(n)。
三、PID算法的程序流程
1、增量型PID算法的程序流程
增量型PID算法的算式:
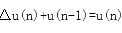
2、位置型PID控制的程序流程

位置型PID算法的程序流程只需在增量型PID算法的程序流程基础上增加一次加运算
3、程序流程
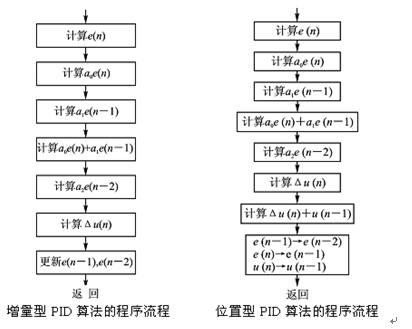
图5 增量型PID算法和位置型PID算法程序流程
四、标准PID算法的改进
1、微分项的改进
(1)、不完全微分型PID控制算法
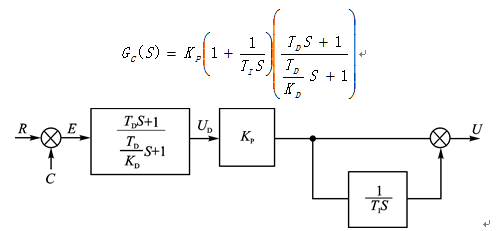
图6 不完全微分型PID控制算法
(2)完全微分和不完全微分作用的区别
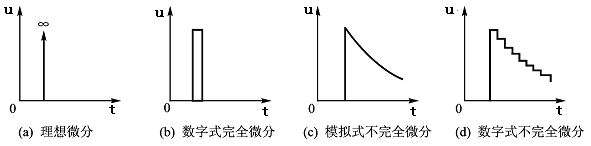
图7 完全微分与不完全微分的区别
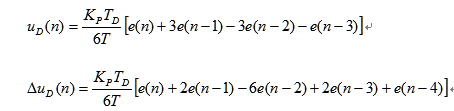
(3)、不完全微分型PID算法的差分方程


2、微分线性和输入滤波
(1)、微分先行
微分先行是把对偏差的微分改为对被控量的微分,这样,在给定值变化时,不会
产生输出的大幅度变化。而且由于被控量一般不会突变,即使给定值已发生改变,
被控量也是缓慢变化的,从而不致引起微分项的突变。微分项的输出增量为

(2)、输入滤波
输入滤波就是在计算微分项时,不是直接应用当前时刻的误差e(n),而是采用滤
波值e(n),即用过去和当前四个采样时刻的误差的平均值,再通过加权求和形式
近似构成微分项
3、积分项的改进
抗积分饱和
积分作用虽能消除控制系统的静差,但它也有一个副作用,即会引起积分饱和。在偏差始终存在的情况下,造成积分过量。当偏差方向改变后,需经过一段时间后,输出u(n)才脱离饱和区。这样就造成调节滞后,使系统出现明显的超调,恶化调节品质。这种由积分项引起的过积分作用称为积分饱和现象。
克服积分饱和的方法:
(1)、积分限幅法
积分限幅法的基本思想是当积分项输出达到输出限幅值时,即停止积分项的计算,这时积分项的输出取上一时刻的积分值。其算法流程如图5-2-4所示。
(2)、积分分离法
积分分离法的基本思想是在偏差大时不进行积分,仅当偏差的绝对值小于一预定的门限值ε时才进行积分累积。这样既防止了偏差大时有过大的控制量,也避免了过积分现象。其算法流程如图5-2-5
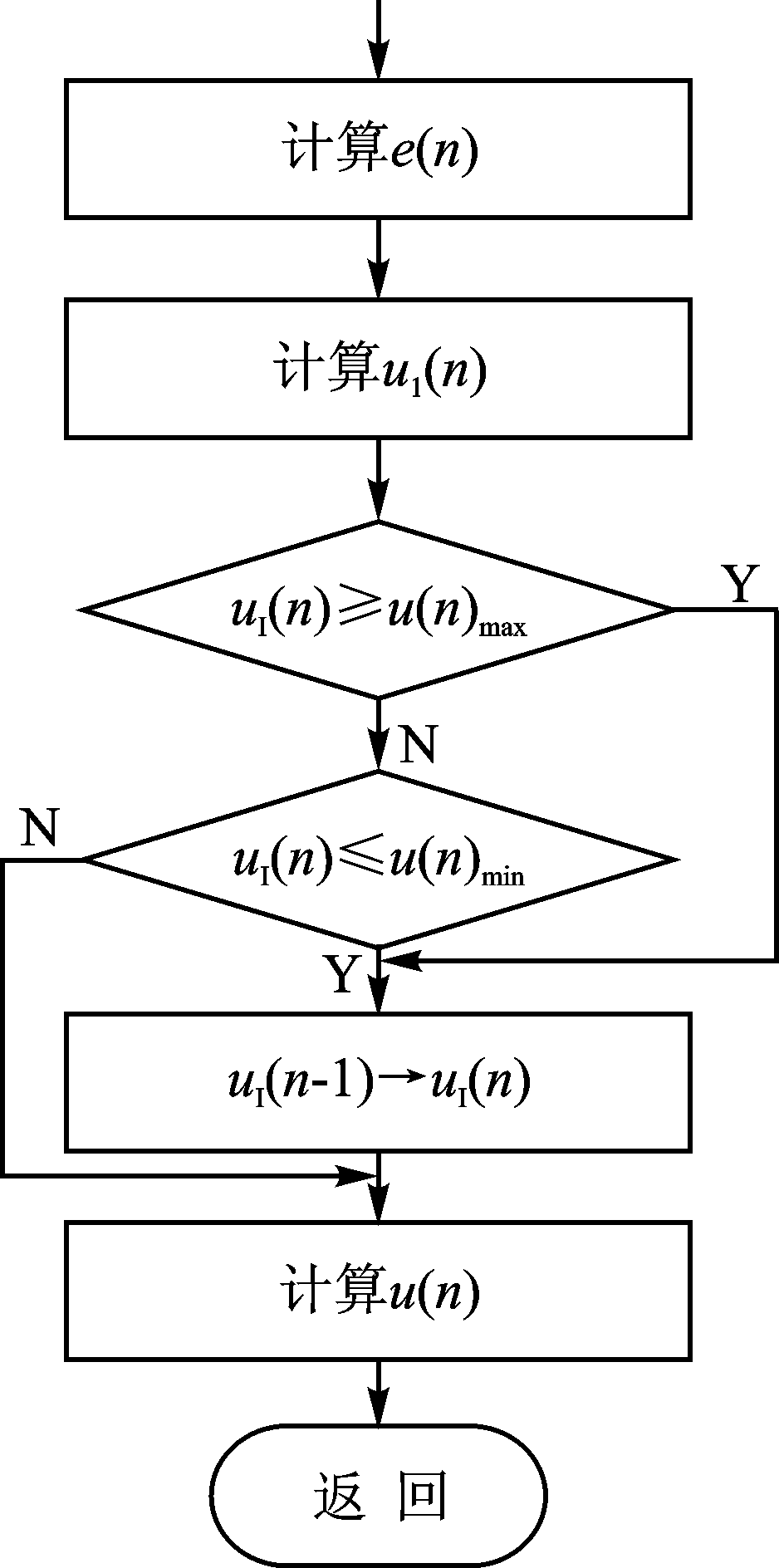
图8 积分限幅法程序流程 图9 积分分离法程序流程
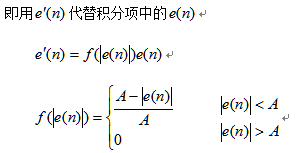
(3)、变速积分法
变速积分法的基本思想是在偏差较大时积分慢一些,而在偏差较小时积分快一些,以尽快消除静差。即用代替积分项中的
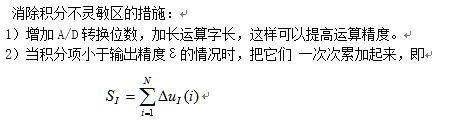
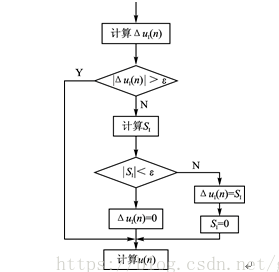
4、消除积分不灵敏区
积分不灵敏区产生的原因
当计算机的运行字长较短,采样周期T也短,而积分时间TI又较长时,容易出现小于字长的精度而丢数,此积分作用消失,这就称为积分不灵敏区。
欢迎关注我的公众号:
编程技术与生活(ID:hw_cchang)

发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/136864.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
