大家好,又见面了,我是你们的朋友全栈君。
目录
2020 年4月2日 由于浏览数量的增加,这里做了一些增补及修改。有问题请大家指出。
1、PID控制基础
PID控制是极其常用的控制方法,主要分为位置式PID和增量式PID,主要方程大家可以查看其他资料,这里就不作详细的解释了,另外还需要了解阶跃响应曲线上面的超调量、稳态误差等参数的意义。
2、模糊控制
模糊控制的发展历史和相关的论证也不说了,百度百科也有。
相关概念扫盲(不一定准确):
| 相关概念 | 简单理解 |
| 论域 | 类似于值域,一般是变量的变化范围 |
| 隶属度 | 一般的“属于”概念是相互独立的,属于你就不属于我。隶属度则定义来了既可以属于你,也可以属于我,只是可能更属于我或更属于你 |
| 模糊语言 | 正大、正中、正小、零、负大、负中、负小这些定性的描述词 |
其实模糊控制的提出确实很有意义,对很多领域来说都是。模糊控制的提出者Zadeh还同时搞了个“软计算”的概念,使用计算机模拟人类的直觉并将其自动化,个人觉得这种将客观现实转换到人的逻辑水平进行推理,再在物理现实实现的过程一直令人着迷,就像大数定理、哥德尔定理。现在深度神经网络的发展其实远超出当时提出的“软计算”,但是感觉如果模糊规则足够庞大复杂,仍然可以达到很高的水平。
模糊控制还常常与专家系统等结合在一起使用,其实要发论文的话还是要结合当前的一些机器学习内容来搞。
大家用MATLAB做一下仿真其实是有利于理解模糊控制的。
模糊控制的隶属度函数定义有相关的理论,但是实际是很灵活的,比如你认为在论域[0,10]里面,3可以是负中、可以负小、可以负大,甚至还有一部分可能是零,只是隶属度不同。
另外,在模糊论域的选取过程中,我们常看到的是(-6,6)这样的区间,其实这并不重要,你如果想把自己的数据套用到这个算法里面,就可以做一下线性变换,把你的论域映射到这个区间。
3、模糊PID简介
模糊PID其实有多种,并不是单一的方法。根据其结构主要分为三种 [1](目前我查到的资料只看到以下三种):
(1)模糊控制和PID控制各自在相应的条件下执行自己的功能,条件作为一种开关(单刀双掷),当采用模糊控制好的时候则使用模糊控制,当使用PID控制器较好时则使用PID算法。
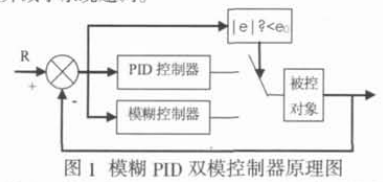

具体我就不画了,直接截的图。
单独的模糊控制器具有较好的鲁棒性,但由于它是离散的规则控制(主要是基于语言变量),往往在工作点附近容易引起小辐震荡(稳态误差问题),使受控系统的静态误差较大。而单独PID控制鲁棒性较差,但其积分作用可以有效消除系统稳态误差,并且在工作点附近的小范围内有较好的调节效果。因此这种双模结构结合了两者的优点,做到的优势互补。
(2)模糊自整定PID算法(名字多:模糊自组织PID,模糊自调节PID、模糊自适应PID…)
这种方法比较常用,也就是使用模糊规则的方式进行PID三个参数的整定,至于它是否优于PID算法,个人持怀疑态度,后湖会提到。这种方法基本就是用计算机代替人进行PID参数整定。结构如下图:
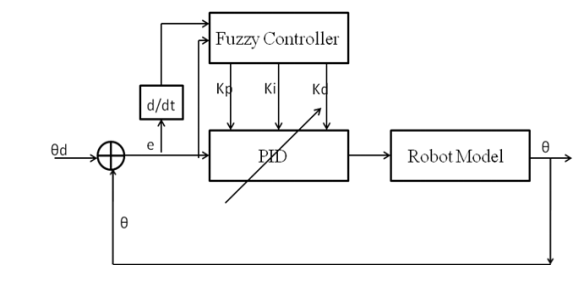
Robot Model 是文献 [2] 中的控制模型,这里大家要用自己的模型代替。
这种方法本质上是PID控制,对于参数变化范围大的对象,要获得良好的相应性能,就需要对PID参数进行在线调整,模糊自整定PID就是比较好的方法。
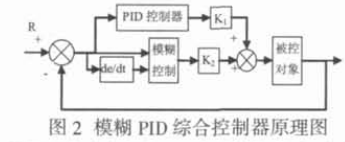
(3)还有一种我也是在参考文献 [1] 才见过的,文中提到这有点类似冗余控制,这个大家可以自行参考研究。
4、模糊自整定PID的理论内容(重点内容)
4.1 基本原理
典型PID控制器的传递函数(CSDN的公式编辑器不太好用,又截图了0.0):
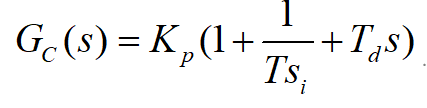
其中 Kp , Ti , Td 分别是比例增益、积分和微分时间常数。PID控制器的设计和参数整定放在模糊规则里。
4.2 模糊子集及其论域的确定
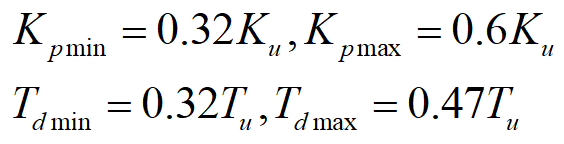
一般PID参数在整定的时候常采用 Ziegler-Nichols 方法,这种方法对于线性或者参数变化较小的对象有良好的响应性能,但参数变化较大时则需要另外调整。Ziegler-Nichols 方法一般设:

其中Ku、Tu分别是在比例(只有比例)控制下,系统临界稳定状态时控制器的增益和系统响应震荡周期;alpha为常数通常取
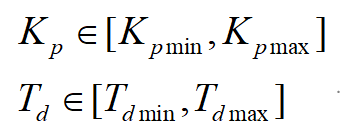
alpha = 4。经大量的仿真计算验证,Kp、Td的调整范围由下确定:
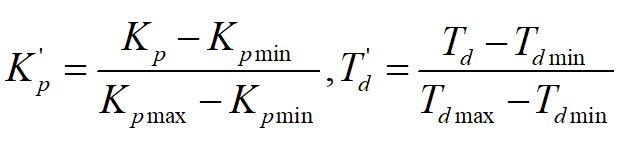
则对于模糊控制器的设计时论域采用如下:
归一化处理:
对于 alpha 值也要进行论域划分 alpha = {2,3,4,5}。
这里隶属度函数的定义就比较灵活了,我参考的书(《模糊控制原理与应用(第二版)》机械工业出版社)上面采用S,B,并经过多次调整得到隶属度函数:
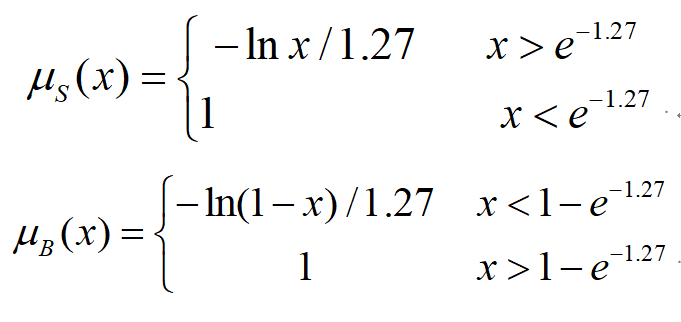
其中的 x 就可以用 Td’ 和 Kp’ 代替。而误差 e 和误差变化率 ec 可以取7语言变量,为了便于记住(其实记住会在后续步骤比较方便),NL,NM,NS,ZE,PS,PM,PL,分别对应负大、负中、负小、零、正小、正中、正大,对应的大家考虑英语怎么表示就行。隶属度函数通常取三角。
4.3 模糊规则的建立
模糊规则主要由“if …… and……then……”的形式给出,例如:
Ri:if e is Ai and ec is Bi then Kp’ is Ci and Td’ is Di and alpha is Ei
表示第i条推理规则为当误差e在隶属度中为Ai且误差变化率ec在隶属度中为Bi时,比例系数Kp’就为Ci,微分系数就为Di并且alpha为Ei。这种推理规则大家可以从一些文献中查找,文献[2]给出了一种设计方式(不过是关于PID三个参数的)。
模糊规则通常来源于专家知识、经验等。其本质上是一个查找表。即给定e,ec ,得出相对应的输出模糊变量。这里要注意的是 数量 的问题:对于单输入单输出(SISO)系统,假设划分为 7 * 7 的规则,那么总共可以得到 49 条不同 e 和 ec 的输出。那么对于多输入单输出(MISO)的情况下,那么模糊规则中你可以设计他们之间的关系为 and 、or 等,这时,有多少个输入,就应该有多少个模糊规则表。对于多输入多输出(MIMO)系统,则涉及到的问题就比较多了。随着输出的增加,模糊规则数会呈现指数形式增加,因此也有一些降维的解决方案,这里不做叙述。
个人揣测:模糊规则库是模糊控制的关键所在,但也是模糊控制的难点。所以很多研究模糊控制的优化都针对模糊规则的涉及。也就是所谓的专家系统、神经网络模糊之类的。
4.4 模糊推理
模糊推理主要为根据模糊运算规则将模糊规则库中的 if then 转化成某种映射。模糊运算的规则实际上是有数学理论支撑的。最常见的运算方法有以下几种:
(1)最小运算法
最小运算法也称 Mamdani 方法,即取隶属度函数极小值。
(2)积运算
积运算也称 Larsen 方法,故名思意,就是取隶属度函数的乘积。
(3)算数运算
算数运算也称 Zadeh 方法,没错,就是发明模糊控制的那个人。算数运算可以表示为:

另外还有最大最小运算、布尔运算、标准法运算等。
其实需要注意的主要就是模糊运算与常规的运算之间的区别。比如在模糊控制中看起来可能是交运算符(^),但是实际上是个取极小值运算。
4.5、解模糊化
解模糊化就是要把经过模糊推理后的结果在系统中进行应用,因为模糊推理所得到的输出可能是“较大”、“适中”、“负小”这样的结果,你直接告诉你的系统是不行的。因此这里需要把这个模糊输出进行清晰化,因此解模糊也称为清晰化、去模糊化。
解模糊化最常用的就是重心法。另外还有最大隶属度法等。其实如果你从数学的角度进行理解就懂了,模糊输出是一个类似高斯分布的隶属度函数,你想让你的系统输出准确,就应该取那个隶属度尽可能大的值,其实也就是均值或者中心。
参考文献:
[1] 高福学, 李伯全, 丁丽娟, et al. 链篦机篦床温度场模糊PID控制的研究与仿真[J]. 微计算机信息, 2009, 25(16):42-43.
[2] S. krishna, S. Vasu,Fuzzy PID based adaptive control on industrial robot system,Materials Today: Proceedings,Volume 5, Issue 5, Part 2,2018,Pages 13055-13060.
[4] A tuning proposal for direct fuzzy PID controllers oriented to industrial continuous processes
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/136184.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
