大家好,又见面了,我是你们的朋友全栈君。
简介
Dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。由for循环可知,其时间复杂度是O(n^2)。
原理
在已知图的邻接矩阵net.vexs[i][j](无向网,含权值的图)的条件下,通过遍历已知图的所有路径,用dis[i]数组来记录到i点的最短路径,然后在循环中不断判断更替。首先,将所有点的集合分为俩部分,一边是已经遍历过的,另外一边是没有遍历过的,分别用mark[i]=1、mark[i]=0来表示。
代码通解
在下面代码中,先将赋予初始值dis[i]=INF(无穷大)、mark[i]=0(未标记),而后单独将源点(x)所联通的路径权值net.arcs[x][i]赋予dis[i](<INF称为初始化),i为联通的点,暂定为到i的最短路径,标记mark[x]=1,即已经遍历;然后,在一个for遍历了所有节点的大循环里面:
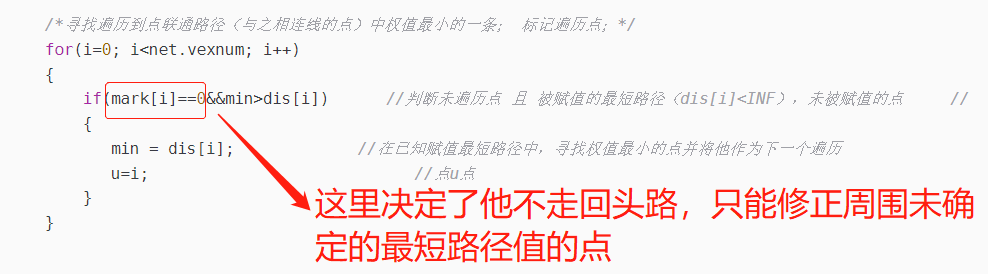
①寻找遍历到点联通路径(与之相连线的点)中权值最小的一条; 标记遍历点;
②修正最短路径;
而后,便是已经遍历所有点了,dis[i]也在不断的修正中得到真正的最小值,即最短路径。详情看下列代码:
#define MAXSIZE 20
#define PLACENUM 12
#define INF 9999 // 此处定义999为无穷大
struct
{
int vexnum,arcnum; //节点数和边数
int vexs[MAXSIZE]; // 节点名
int arcs[MAXSIZE][MAXSIZE]; //俩个节点之间的值
} net;
/*补充的结构体net,2019.7.3*/
void Dijkstra(int x,int y) // x为源点,y为终点
{
int i,j,k;
int min;
int u; //下一个放入集合p的点
int dis[net.vexnum]; // 最短路径
int mark[net.vexnum]; // 被mark的便是已经遍历,未被mark的便是未遍历
/*首先进行最短路径初始化*/
for(i=0; i<net.vexnum; i++)
{
mark[i] = 0;
dis[i] = net.arcs[x][i];
}
mark[x]=1; // 标记源点
for(k=0; k<net.vexnum; k++) // for 大循环
{
min = INF; // min初始化最大值,便于后来数据替换(每一个点的出度入度判断)
/*寻找遍历到点联通路径(与之相连线的点)中权值最小的一条; 标记遍历点;*/
for(i=0; i<net.vexnum; i++)
{
if(mark[i]==0&&min>dis[i]) //判断未遍历点 且 被赋值的最短路径(dis[i]<INF),未被赋值的点 // 应当min==dis[i]=INF
{
min = dis[i]; //在已知赋值最短路径中,寻找权值最小的点并将他作为下一个遍历
u=i; //点u点
}
}
mark[u]=1; //标记u点,下面u修正将会以最短路径进行辐射
/*修正最短路径*/
for(i=0;i<net.vexnum;i++)
{
if(!mark[i]&&dis[i]>dis[u]+net.arcs[u][i]) // !mark[i]判断不去走回头路, // dis[i]>dis[u]+net.arcs[u][i]有俩个用途:①若u链接的是x源点没有赋值最短路径的点,那么这里可以赋值②若是赋值过的点,那么可以判断是上一个dis[i](此时是被赋值过的)是不是真正的最短路径,即修正。
{
dis[i] = dis[u] + net.arcs[u][i]; //若A->C比A->B->C更长那么A->B->C则是到C的最短路径,下图将解释。
}
}
}
printf("最短路径值为: %d",dis[y]);
} 我们以A,B,C三个点来举例子,三个点的最短路径分别为dis[0]、dis[1]、dis[2]。
我们以A,B,C三个点来举例子,三个点的最短路径分别为dis[0]、dis[1]、dis[2]。
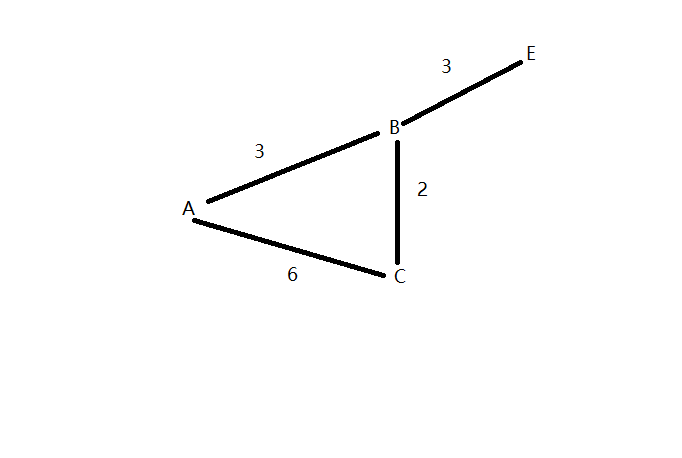
①A为源点初始化,dis[B]=3 (到B的最短路径,dis[1]), dis[C]=6;
②dis[B]<dis[C],选取B为u下一个遍历点;与B相联的有A(不走回头路)、E、C;
③E未赋值,赋予dis[E]; C被之前赋予过,比较 dis[C] > dis[B] + net.arcs[B][C] (要不然你根本进不了这儿),重新赋值dis[C] = dis[B]+net.arcs[B][C];
④大循环遍历所有点,走遍天下。


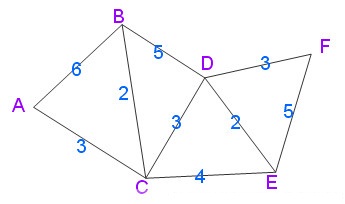
我觉得下面几张图很不错,图片取自https://www.cnblogs.com/biyeymyhjob/archive/2012/07/31/2615833.html

图一
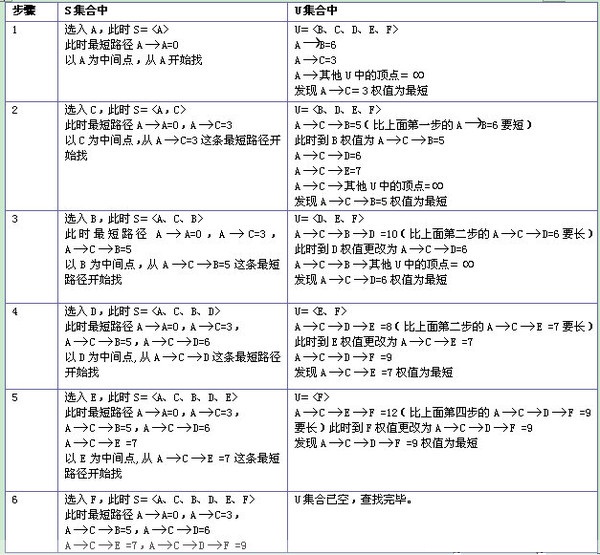
图二
19.3.24
关于修正最短路径
请参考一下文中引入的动图(图一)和表格图(图二),迪杰斯特拉求最短路径是,将需要遍历的点集合一个个进行遍历的。!mark[i]是需要其值为false(尚未遍历到,这是相对于当前遍历点),当然,这就实现了它不会往回走,同时记录它“向前走”的最短距离点u,在其基础上(修正循环),与u点相连的未被标记(遍历到)的点记其中一个为z,判断源点x->z点们的dis(最短)值是否大于x->u->z点们的距离,如果大于,更新z点们的最新(新的路径)最短距离,在已知最短距离的情况下然后进行更新,直到遍历完所有的点集合(所有路径)。从源点往外辐射就能够理解了。
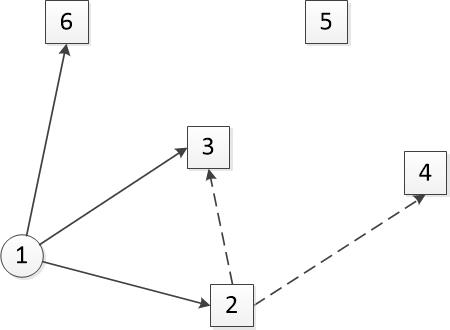
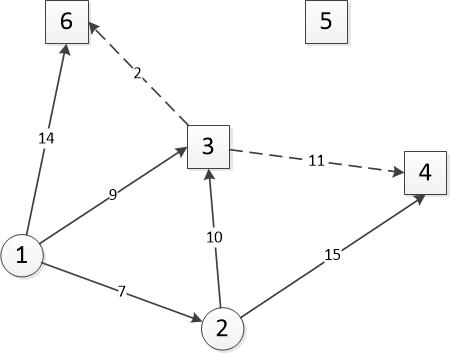
比如说1,2,3为三角形相互联系。当前是2。已经遍历了1,赋予了1->2、1->3、1->6的dis值,那么在修正部分就会从u(设12、13、16中12距离最小),也就是2往外与没遍历且相邻的3和4判断以下:1->3大于1->2->3? 1->4大于1->2->4?,如果大于,更新dis值,此为修正,这里在已知最短距离1->2的基础上修正了1->3和1->4的dis值。同理到3的时候会修正源点(x/1)到4和到6的最短距离。
下图圆形为已遍历点,方形为未遍历的集合数据,实线为相邻连线,虚线为修正过程。
PS:mark是已经被找过从该点出发的相邻路径,修正在已知最短距离的情况下(u),进行辐射,也就相对于找了u的所有相邻路径来比较更新(!mark[i]&& dis[i]>dis[u]+net.arcs[u][i]),但他并未记录u辐射的路径中的相邻最短路径(需要大循环)。
21.4.16
关于负权值问题
迪杰斯特拉本质上是贪心:找局部最优解,前提是最终的结果是由不断简化问题的局部最优解组成的,贪心是一种特殊的动态规划:他只关注局部最优解(但是我们知道局部最优解不一定是全局最优)。弗洛伊德是动态规划。这里体现出一点:迪杰斯特拉只是单源最短路径算法,用于计算一个节点到其他所有节点的最短路径。而弗洛伊德则是算出所有的点之间的最短路径(多对多)。
那么我们再看负权值问题:迪杰斯特拉:每次修正,我们只会修正当前点所连接的,未被遍历过的(mark[i]),注意前面这句话有两个条件。那么久说明他不会修改早已经(很久以前)就已经确定的最短路径,因为已经确定了是局部最优解,这里在代码里面也能看出来。而也因为这样,弗洛伊德是是能够算负权的(他可以更新“早已经”确定的最短路径,因为他要算出全部点之间的最短路径),值得注意的是弗洛伊德不能解决带有“负权回路”(或者叫“负权环”)的图,因为带有“负权回路”的图没有最短路。
除此之外,求带负权值边的单源最短路径还可以用贝尔曼-福特算法。至于迪杰斯特拉比弗洛伊德快,也是因为他是单源的缘故。
如果看懂了点个赞,给点小动力,谢谢啦~
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/136118.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
