大家好,又见面了,我是你们的朋友全栈君。
注:
1:此为永磁同步控制系列文章之一,应大家的要求,关于永磁同步矢量控制的系列文章已经在主页置顶,大家可以直接去主页里面查阅,希望能给大家带来帮助,谢谢。
2:矢量控制的六篇文章后。弱磁、MTPA、位置控制系列讲解已经补充,也放在主页了,请大家查阅。
3: 恰饭一下,也做了一套较为详细教程放在置顶了,内含基本双闭环、MTPA、弱磁、三闭环、模糊PI等基本控制优化策略,也将滑模,MRAS等无速度控制课题整理完成,请大家查看_**
1 电机模型的选择及参数设置
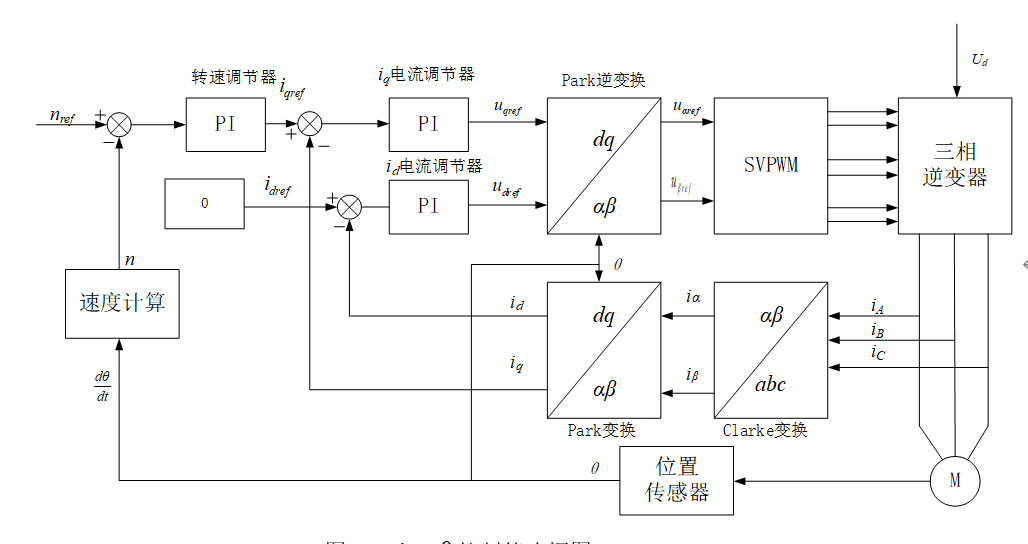

电机总体控制框图如下,我们按照这个框图来一步一步的搭建。
1.1 型号设置
永磁同步电机的英文缩写为PMSM,全称 Permanent Magnet Synchronous Machine。在 library 内搜索 Permanent 即可找到它。
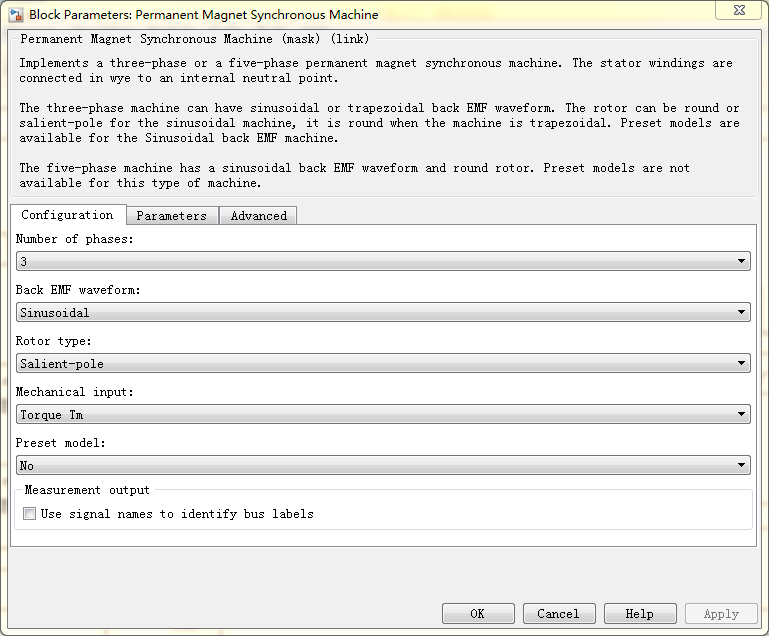
- number of phase 电机相数
- Back EMF waveform 反电动势波形
- sinusoidal 正弦波
- Rotor type 转子类型
- salient-pole 凸极
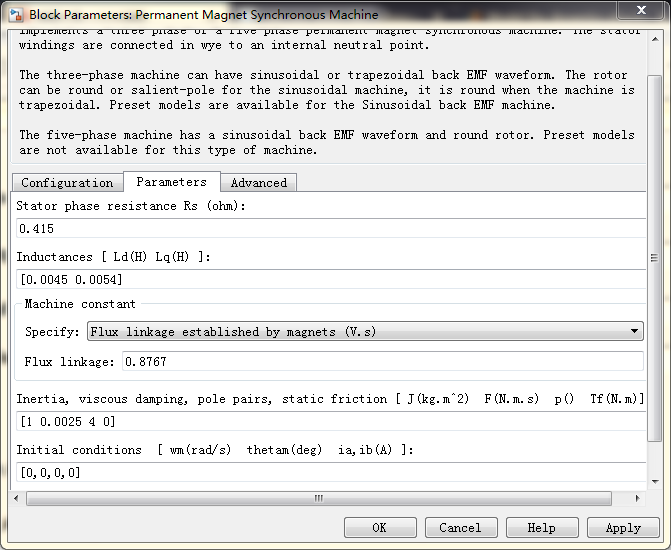
1.2 参数设置
在此仿真中没用系统自带的典型电压模型,为了便于以后实验,用的是实验室已有电机的参数。
1.3 高级设置
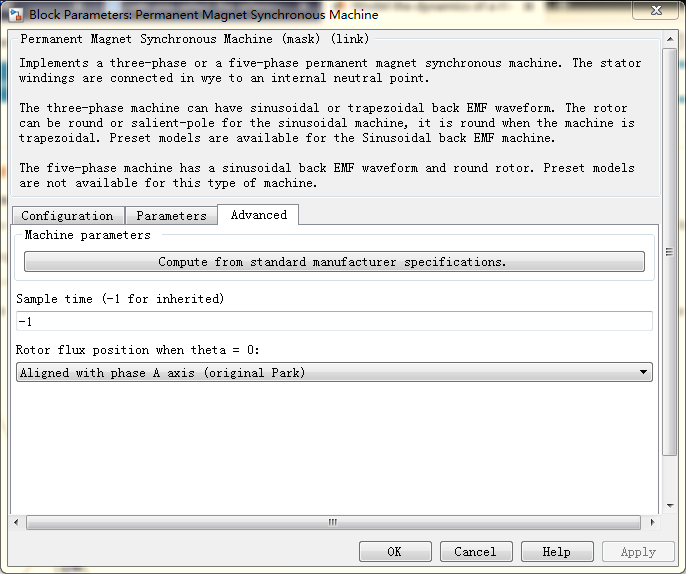
注意这里的 Roto flux position when theta = 0 一定要选择
Aligned with phase A axis 跟随A相,因为当theta=0 时磁通不跟随A相,会出现非常严重的相位错位,导致PI调节器失效。
最全的模型设置请参考,英文的但是介绍的很详细:
http://ww2.mathworks.cn/help/physmod/sps/powersys/ref/permanentmagnetsynchronousmachine.html#brlinhw-3
2 变换环节的设置
2.1 3/2 变换 和 2/2变换 functions的设置
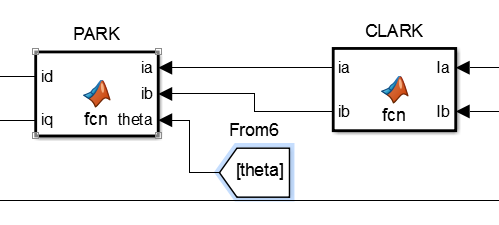
function 内数学变换程序:
function [ia,ib] = fcn(Ia,Ib)
ia=sqrt(2/3)*sqrt(3/2)*Ia; % 3/2变换 N3/N2 = 2/3 且 ia + ib + ic = 0
ib=sqrt(2/3)*(1/sqrt(2)*Ia+sqrt(2)*Ib);
end
function [id,iq] = fcn(ia,ib,theta)
%#codegen
id=ia*cos(theta)+ib*sin(theta); % 2/2变换
iq=-ia*sin(theta)+ib*cos(theta);
end
2.2 两相旋转变两相静止部分function设置
function Uref = fcn(uq,ud,iq,id,theta)
ua_out=ud*cos(theta)-uq*sin(theta);
ub_out=ud*sin(theta)+uq*cos(theta);
Uref=[ua_out;ub_out];
end
以上三个变换的程序编写均以永磁同步电机矢量控制(二)——坐标变换中所写公式编写。
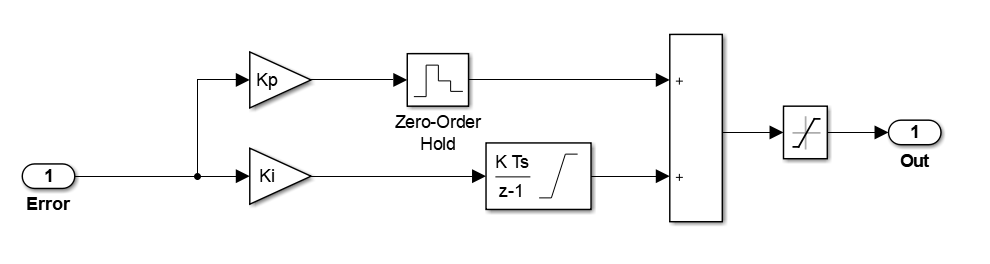
3 PI模块的搭建
PI模块的搭建主要来源于其传递函数:
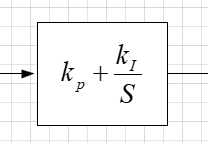
PI调节器的限幅值设置,请大家参考这篇文章。https://blog.csdn.net/sy243772901/article/details/105287993
3.1 具体PI 参数的计算
由电机参数
Rs = 0.415
Lq = 0.0054
Ld = 0.0045
J = 1
B = 0.0025
flux = 0.8767
P= 4
由 PI 参数整定文章内公式计算出得
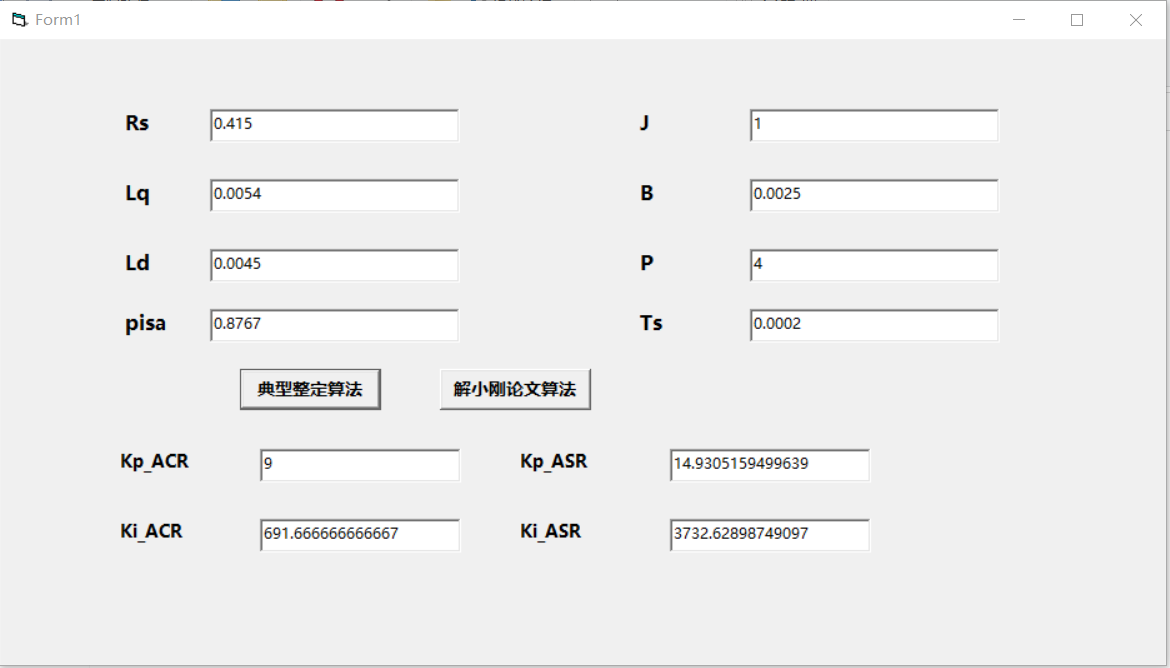
如图所示将PI参数输入到PI调节器中,上图是我自己做的一个VB小程序,把计算公式写在里面了,算是偷个懒。
12月22日补充:这张图计算出来的转速环参数经常需要手调,需要具体计算的请大家参考以下重新整理的转速环PI参数设计过程:https://blog.csdn.net/sy243772901/article/details/110246280
4 实验结果
4.1 空载输出特性
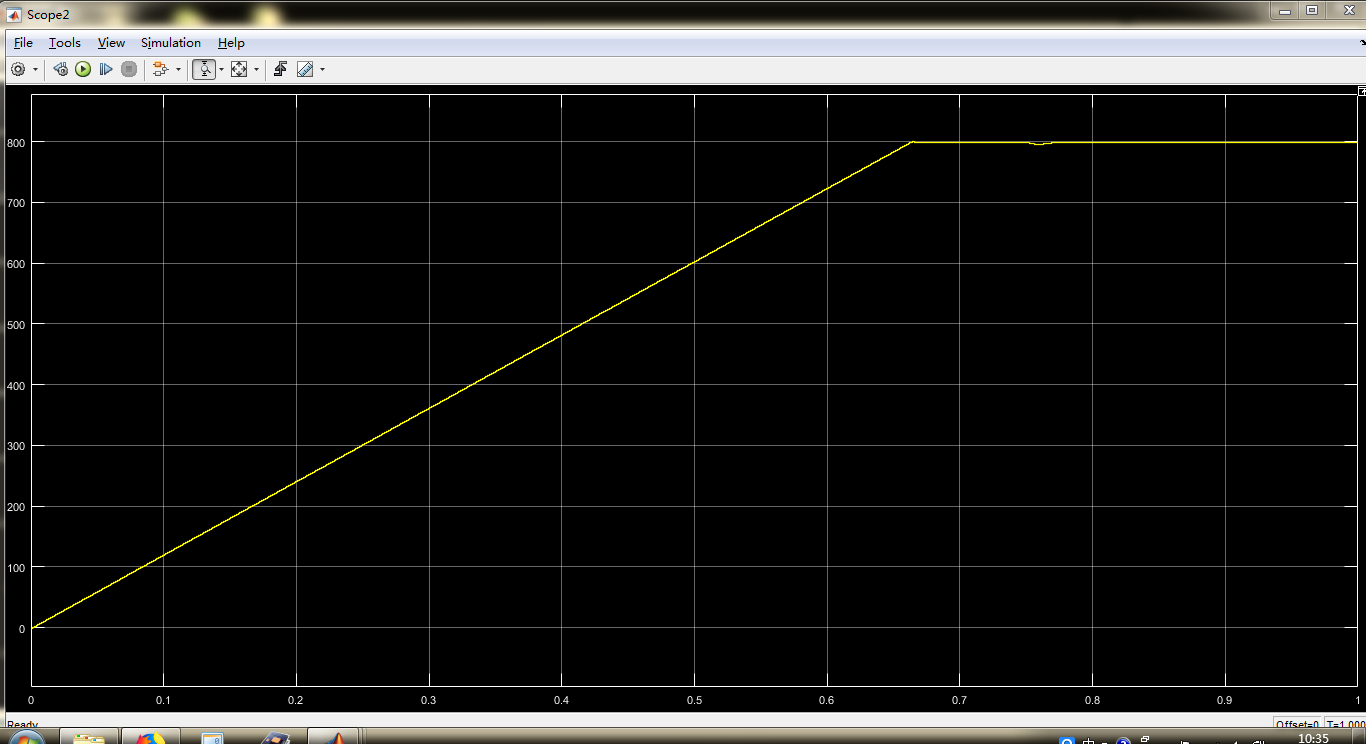
转速波形
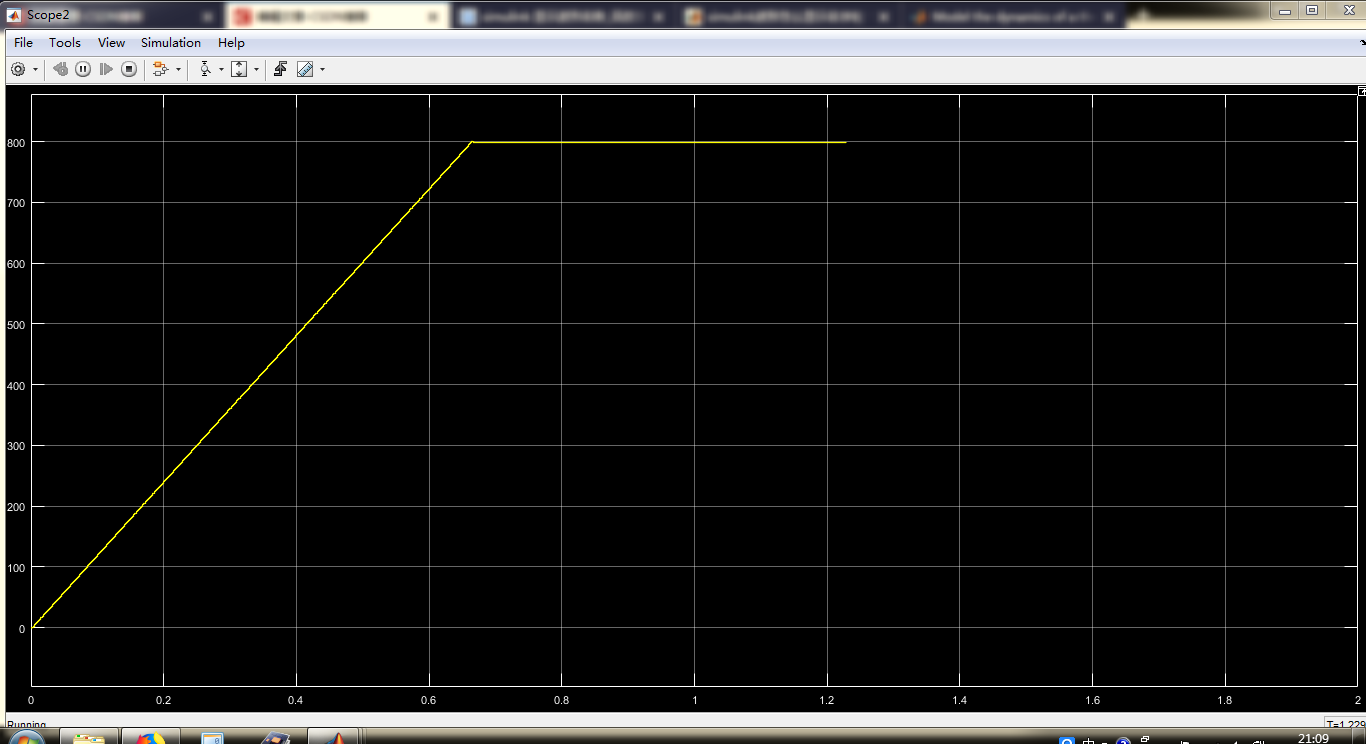
稳定性:系统无明显的超调,在到达给定转速后很快稳定下来。稳定性优良。
准确性:准确跟随速度给定。准确性优良。
快速性:由于电机较大,转动惯量达到了J=1,所以0.65s左右转速升到800r/min,可见系统的快速性还是相当不错的。
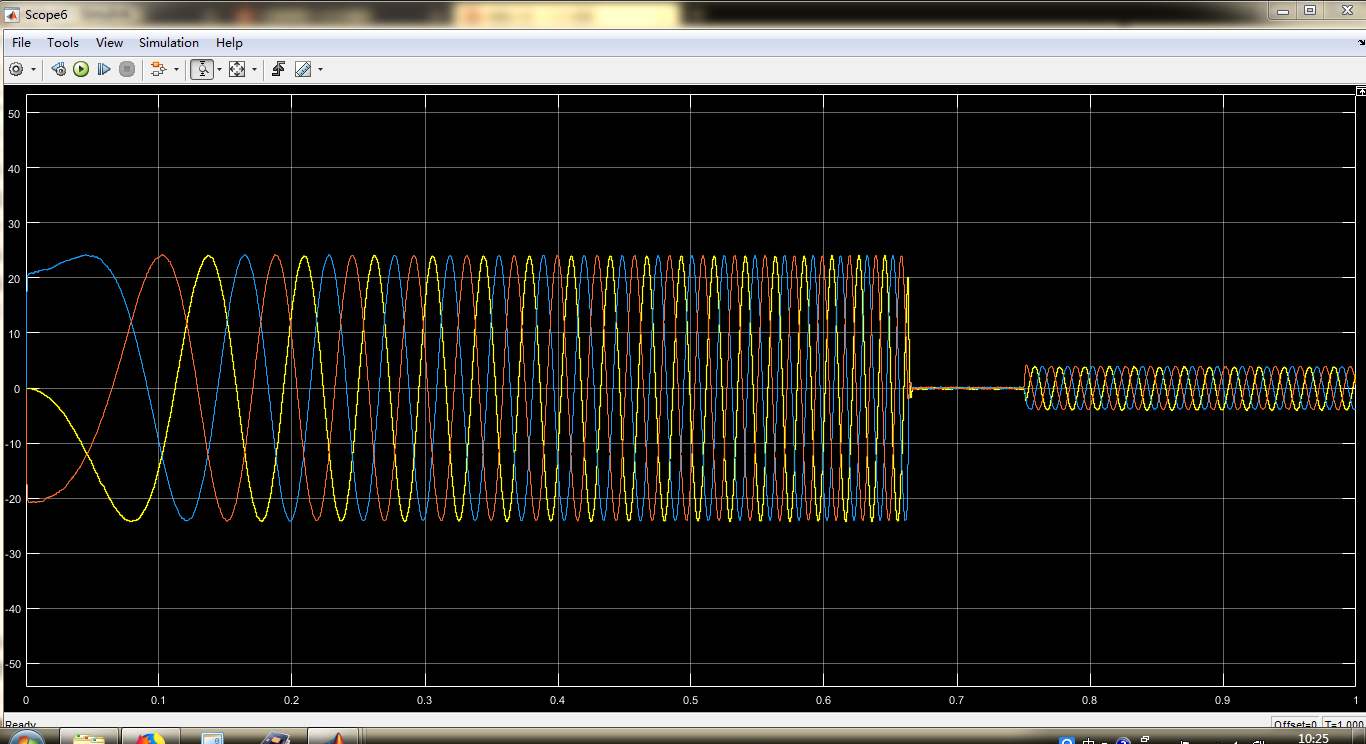
定子三相电流波形
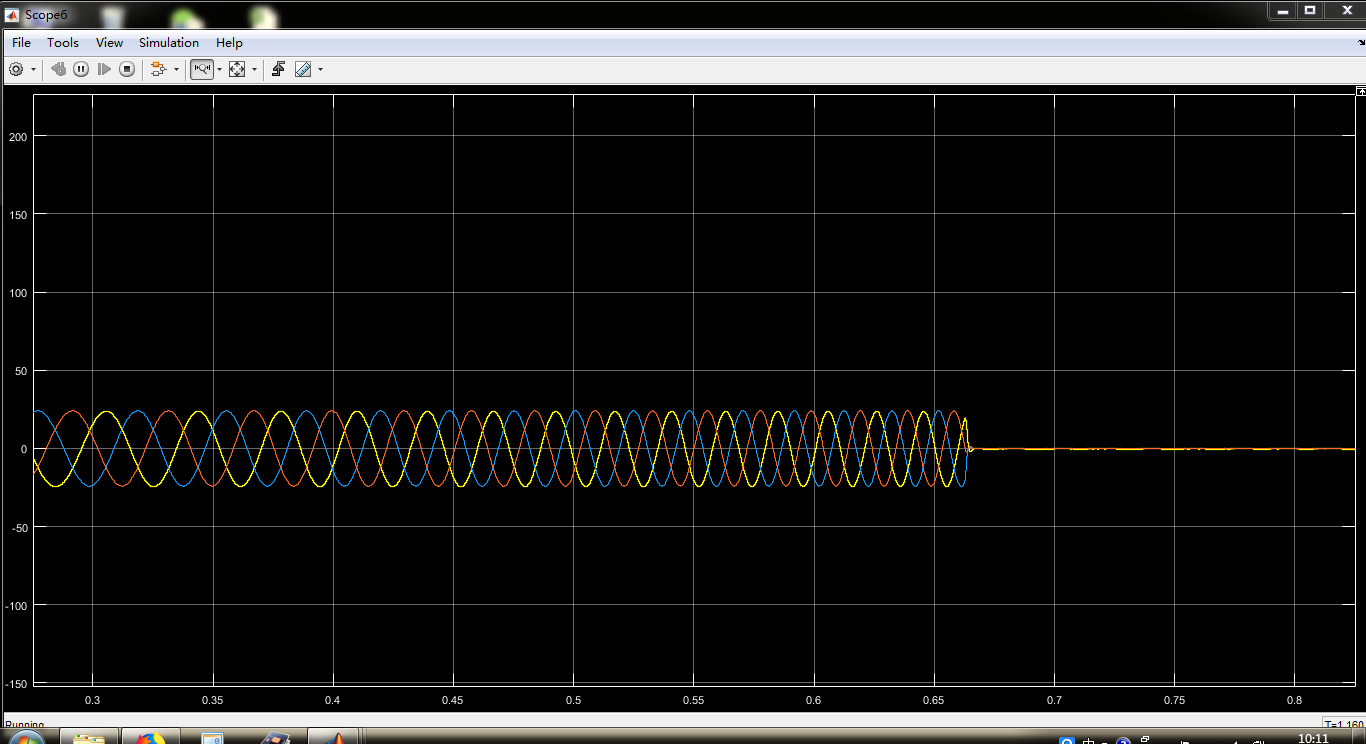
三相定子电流呈现较好的正弦特性,在到达给定转速后,迅速降低,到0-0.2附近波动。
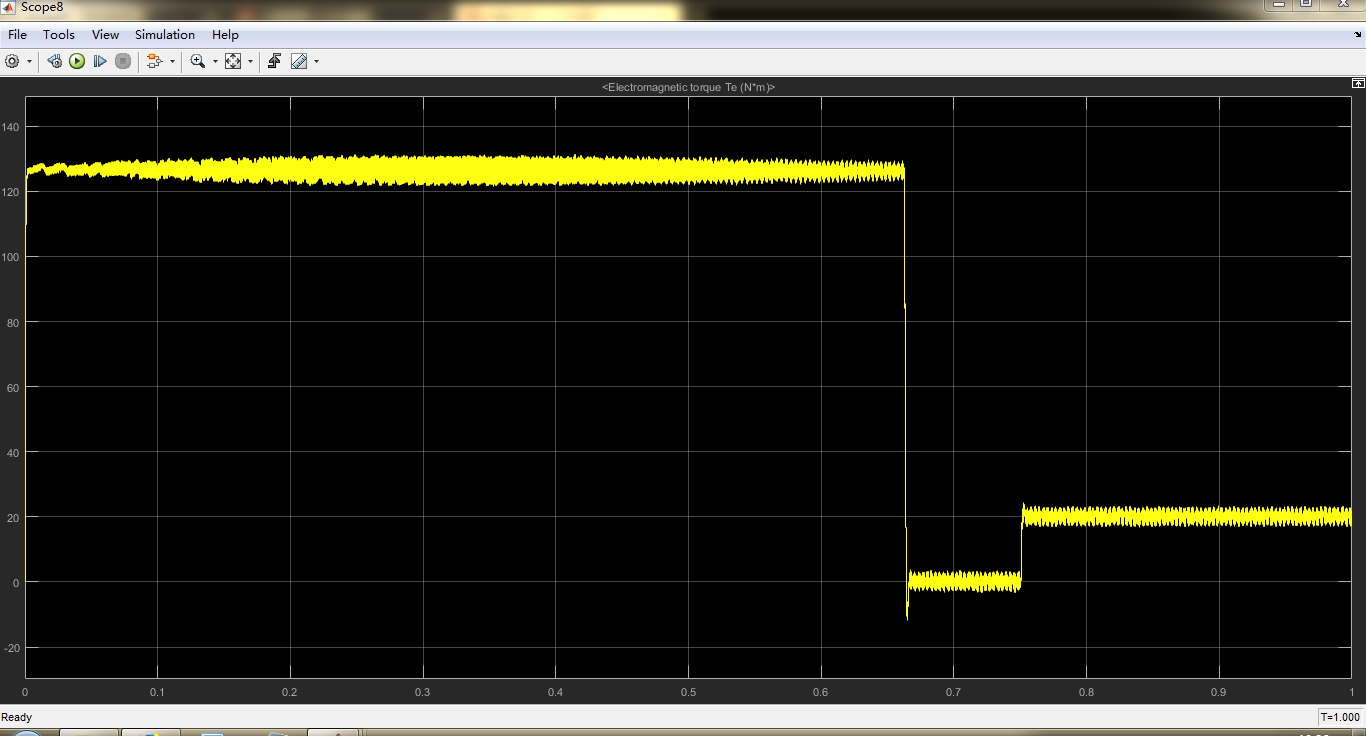
电机转矩波形
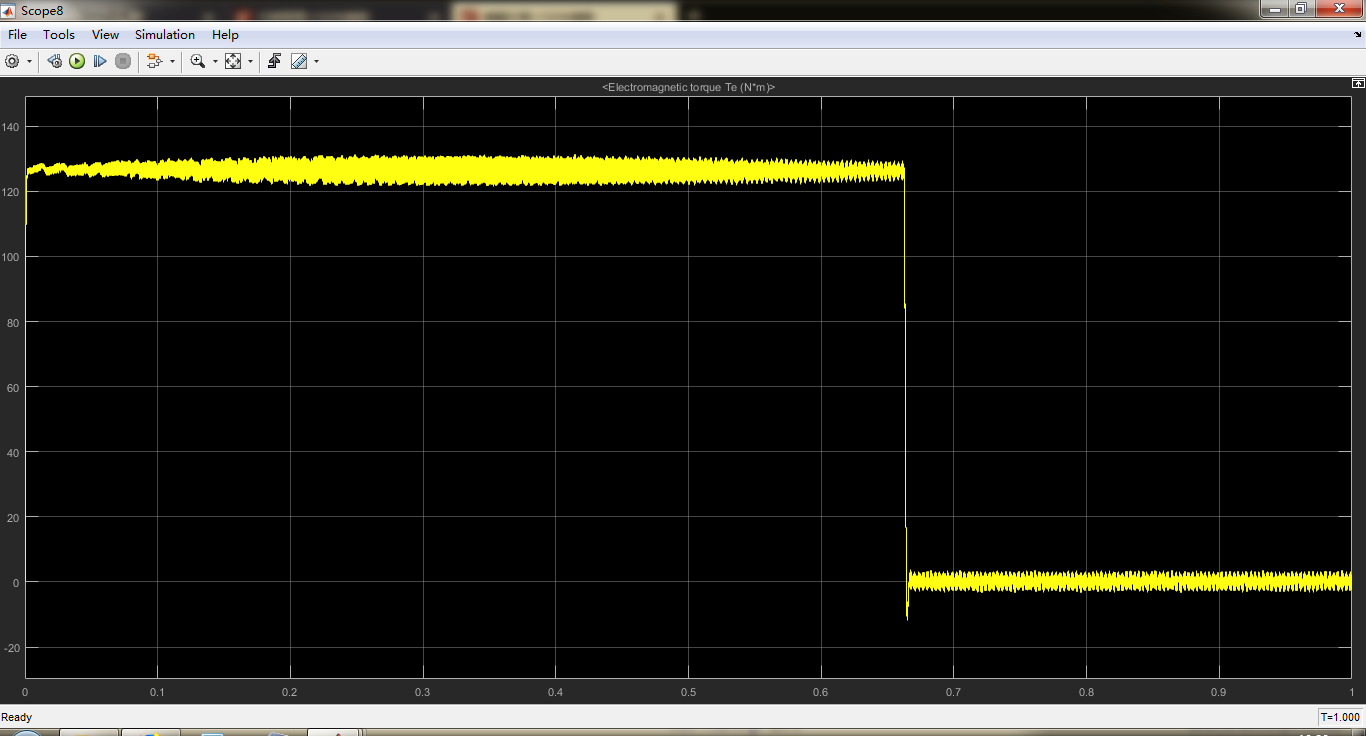
电机转矩波形稳定在额定转矩附近,在到达给定转速后迅速降低,进行维持稳定转速的微调。
4.2 带载输出特性
4.2.1 带20N负载输出特性
转速波形
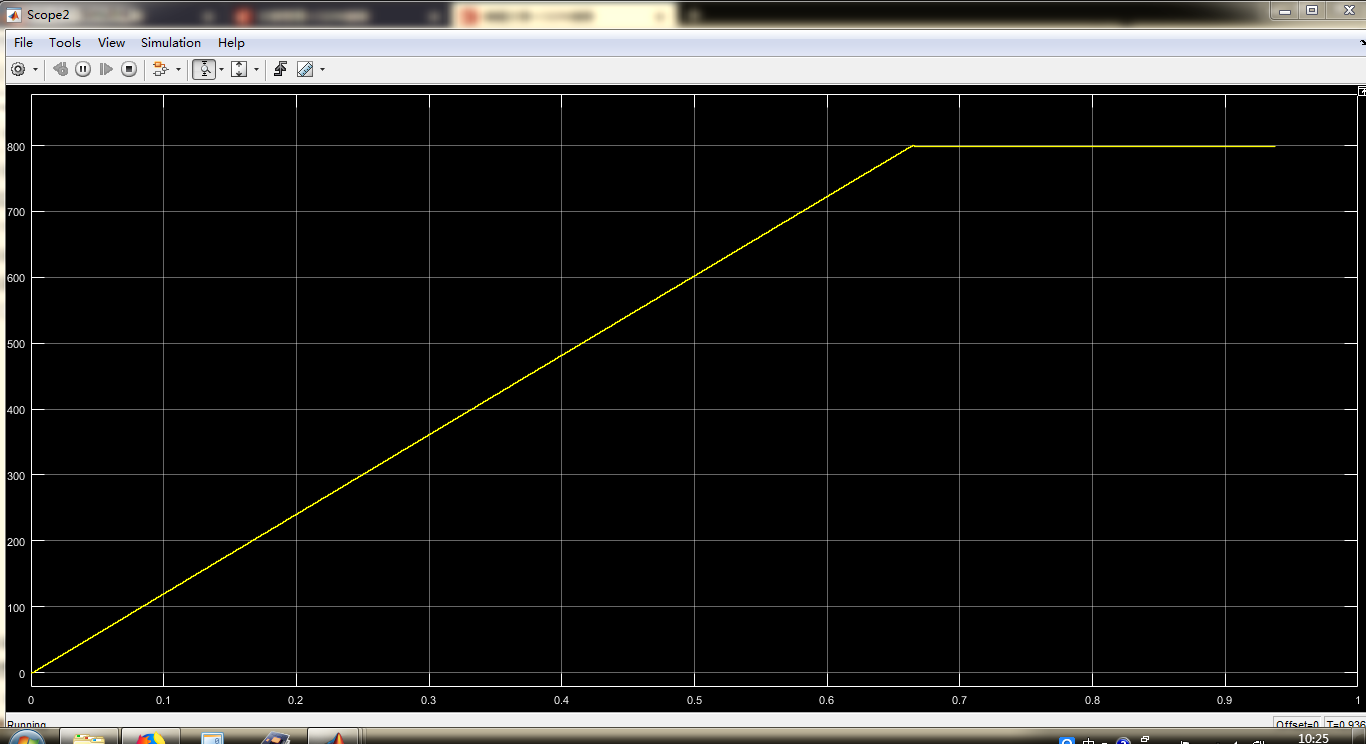
基本无明显速度降落。放大后速降在0.5很快就恢复到给定值。
三相定子电流波形
三相定子电流正弦特性完好,且在给定负载后反映迅速。
转矩波形
转矩波形稳定,在到达给定后迅速降低,突加负载后迅速上升,性能优良。
4.2.2 带100N负载输出特性
转速波形
在突加负载100N后,速度有一个较小的降落后迅速的返回给定值,性能优良。
三相定子电流波形
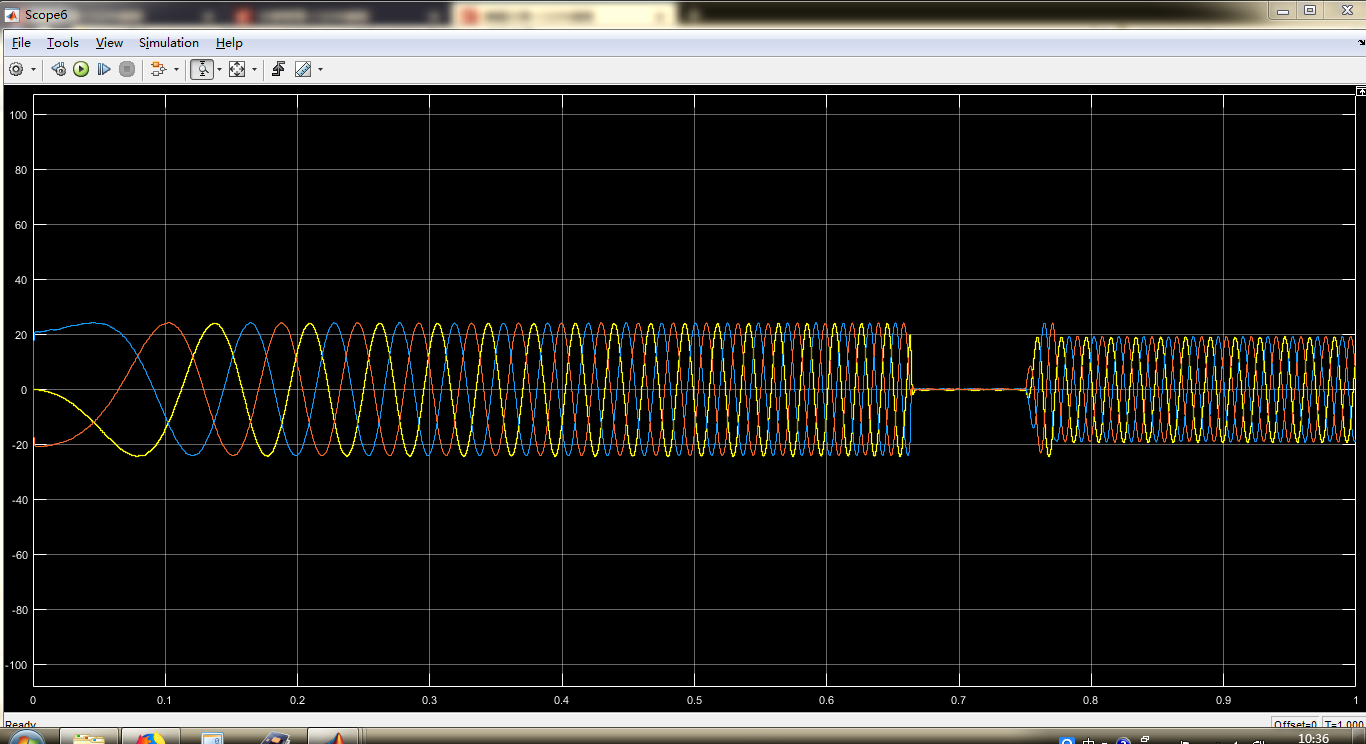
定子三相电流与20N负载一个明显的区别,在突加负载后,定子电流先增大到额定电流大小,按照最大电流升速,再减小至100N转矩所需要的电流大小,稳定转速,证明PI调节器参数设定合理,既有良好的抗扰性能。
转矩波形
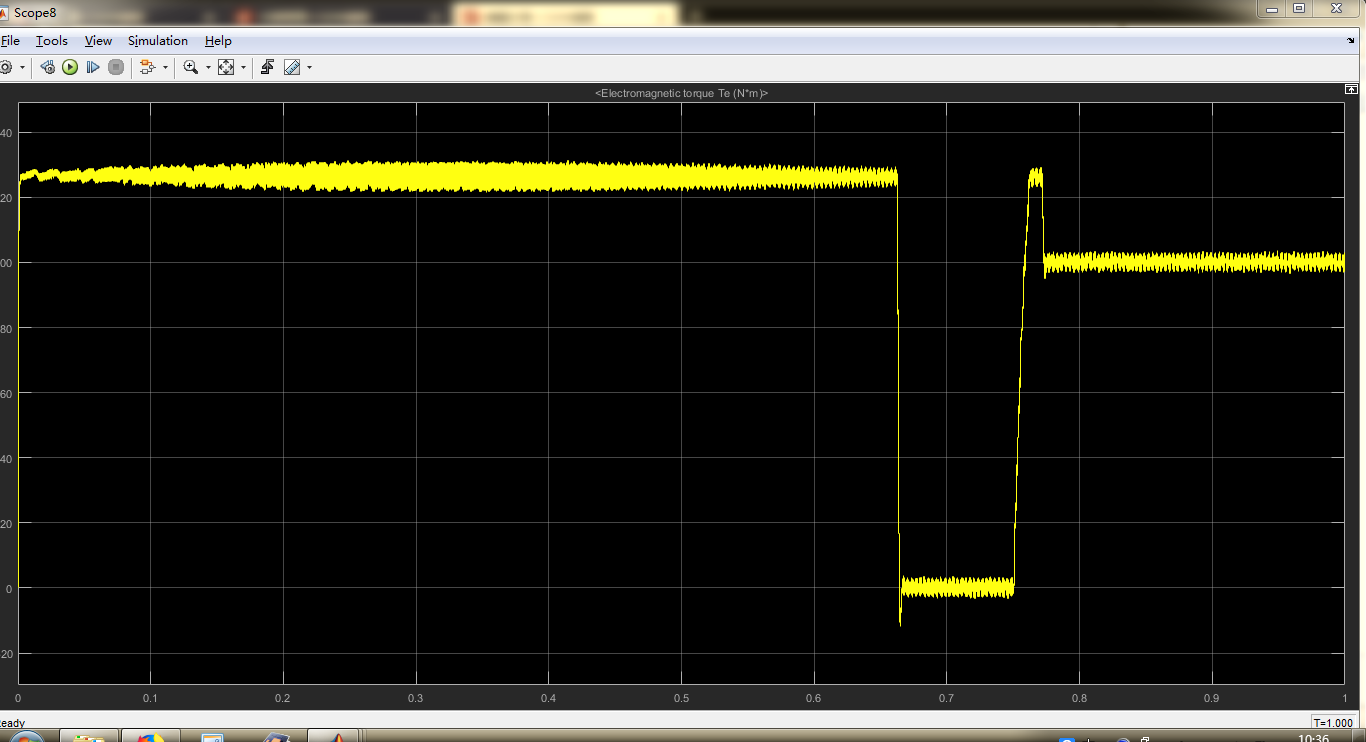
同上,100N转矩波形与20N转矩波形的区别也在于,在突加负载后,转矩先增大到最大转矩,以最大的转矩升速,再减小至维持给定转速的转矩大小。
小结:按照解小刚老师论文的阐述,以及陈伯时书籍上异步电动机矢量控制的对照,对永磁同步电机,坐标变换解耦以及PI参数设定,形成了整个仿真基础。实验效果较为良好,学到了很多永磁同步电机的知识。
个人感想:在仿真时候,内心是跟随那转速波形一点一点波动的。看到转速一点点到达给定,看到转速在突加负载时迅速返回给定,心中更是激动不已。其中当然有很多失败的过程,比如电机模型内跟随A相相位设置不当,导致一下午换了多种电机模型换了多个PI参数,波形仍然不堪入目的时候,内心也是比较失落的。不过似乎我比较热爱我的专业,就算这样仍然一直坐在实验室,继续更换电机继续更换参数,虽然很枯燥却乐在其中。还有一点就是看论文确实很重要,作者的思想和提供的参考论文,都是我们专业最精华的知识,我们的大部分问题都可以通过查论文来解决。通过看这些论文,我从侧面体会到未来研究生的生活,就好想一个检索机和一个记录仪,一遍遍的在各大学者书籍中寻找自己需要的知识,然后记录下来。这个检索的过程是相当兀杂的,想要记录下来也需要耐心。但转念一想,想到自己能在如果盛大的知识的海洋里遨游,寻找宝藏,这又是多么何乐而不为的美好。路漫漫其修远兮,吾将上下而求索,以此与各位互勉。
需要文章资料与仿真模型的同学请博客私信我,请勿评论留下个人信息,避免信息外泄,私信看到就会发过去。。
整理不易,希望大家帮忙点个赞呀,谢谢啦~_
系列文章链接:
永磁同步电机矢量控制到无速度传感器控制学习教程(PMSM)
永磁同步电机矢量控制(一)——数学模型
永磁同步电机矢量控制(二)——控制原理与坐标变换推导
永磁同步电机矢量控制(三)——电流环转速环 PI 参数整定
永磁同步电机矢量控制(五)——波形记录及其分析
永磁同步电机矢量控制(六)——MTPA最大转矩电流比控制
永磁同步电机矢量控制(七)——基于id=0的矢量控制的动态解耦策略
永磁同步电机矢量控制(八)——弱磁控制(超前角弱磁)
永磁同步电机矢量控制(九)——三闭环位置控制系统
永磁同步电机矢量控制(十)——PMSM最优效率(最小损耗)控制策略
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/135931.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
