大家好,又见面了,我是你们的朋友全栈君。
上一篇写了模糊自整定PID的理论,这篇来做MATLAB仿真。
目录
补充内容:如何计算临界稳定下的开环增益 Ku 和震荡周期 Tu
前置说明:由于本人长期在外地出差,还没有时间来做本文中模型的Debug, 也未对每一步深入研究。请各位先参考评论区自行检查,我后续会更新本文。十分抱歉。
补充内容:如何计算临界稳定下的开环增益 Ku 和震荡周期 Tu
学过控制工程或者相关理论的同学应该比较了解,判断系统稳定性的条件一般用到劳斯表(劳斯判据)。而PID控制和模糊PID控制极大地依赖系统传递函数的建立,因此如果对于系统复杂,难以建立模型的,还是需要考虑一下。
(1)通过自己对所需要控制的系统进行建模,拉普拉斯变换得到传递函数Gc(s),然后求得其特征方程(形式如下):


其闭环系统特征方程可以表示为:

特征方程的计算就是要求闭环系统传递函数的分母为0,如果是开环系统,就将传递函数的分子和分母加起来作为特征方程。
(2)将系统特征方程中的s用(-jw)代替,然后令实部和虚部分别等于0,解出特征根。特征根 w 就是震荡频率,K 为开环增益。
则,周期 Td = 2PI/w 。这样就可以用来求取PID参数的论域了。
以上下划线理论有问题,验证后发现并不是这样计算。
修改内容:
修改PID三个参数的模糊论域为
P = [0 0.1];
I = [0.0.05];
D = [0.0.1];
MATLAB进行模糊PID仿真
1、准备工作
首先需要选取传递函数,设系统传递函数方程如下:
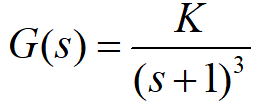
纯属为了计算方便。解得 K=8,w^2=3。
先看使用 Simulink 自带的仿真结果,其PID参数整定的情况:

接下来设计模糊自整定PID。
2、模糊控制器的设计
步骤:
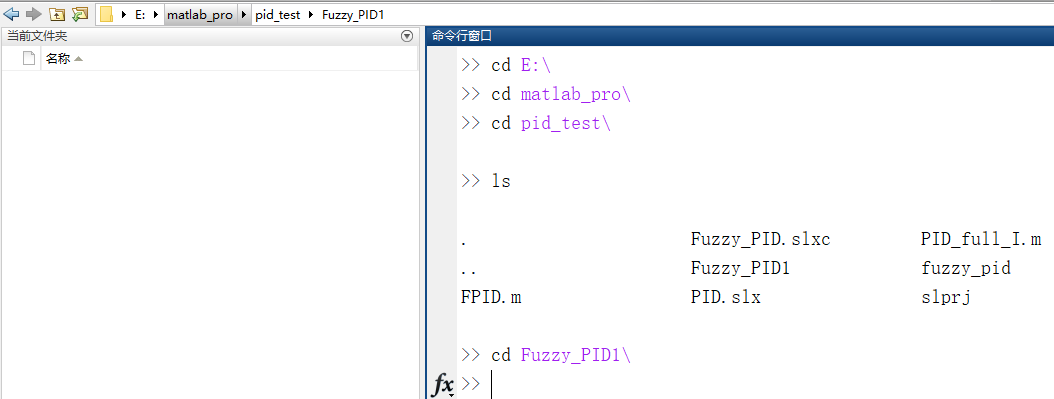
(1)打开 MATLAB ,选择一个工作目录,这里一般选择一个可写的磁盘即可。为什么要可写的呢,因为C盘有些目录下你的用户权限是不可写的,所以就算你设计的没有问题也没法运行。
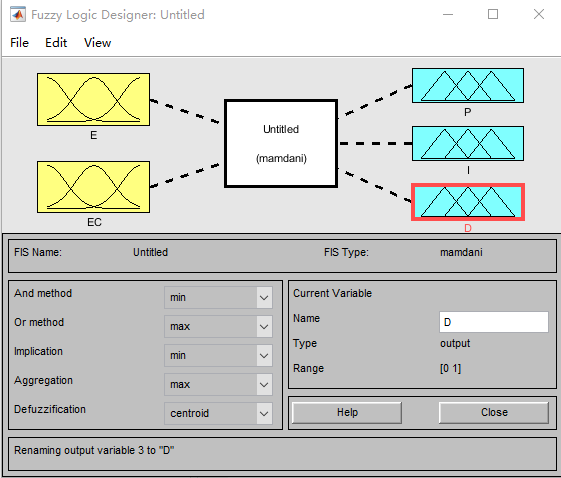
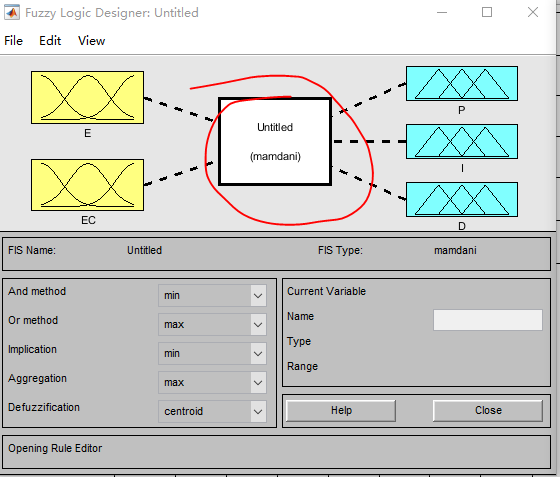
(2)命令行输入fuzzy,打开模糊规则编辑器。
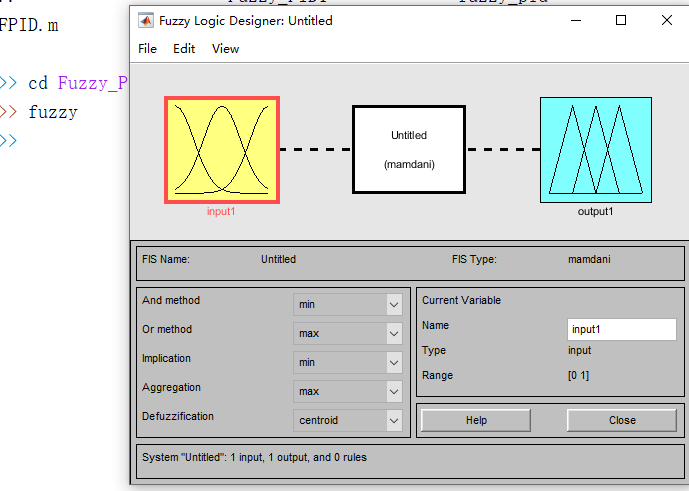
(3)Edit -> Add variables -> Input;Edit -> Add variables -> Output;Edit -> Add variables -> Output。单击选中,分别对 input1 、input2、output1、output2、output3 进行隶属度编辑。对于输入进行命名,分别为误差 E 和误差变化率 EC。输出分别命名为P、I、D,其他不变。
(4)双击 Input1 进入隶属度编辑器,Edit -> Add MFS 。添加隶属度函数,这里采用三角形隶属度函数,添加4个,实际应该对每一个都添加4个,并进行编辑。
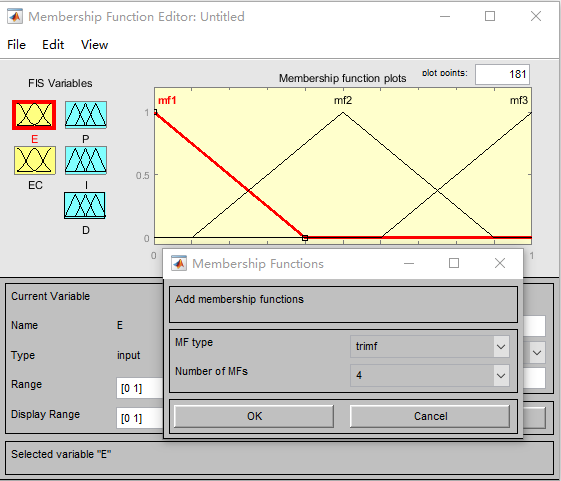
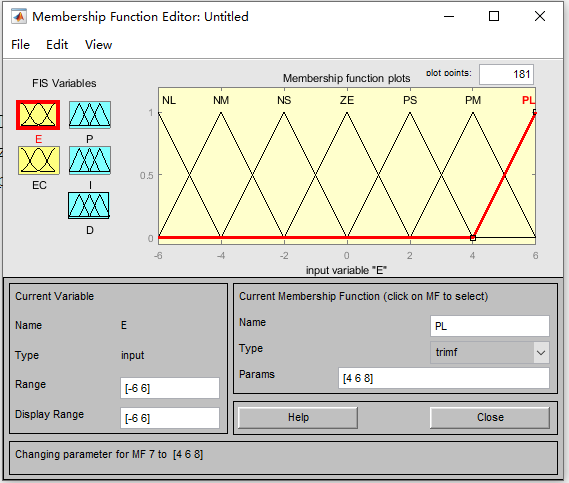
(5)其中 E 和 EC 的论域(Range)取 [-6 6],然后对每个隶属度曲线进行编辑。这里有两个小问题(或者说是小技巧)。
a. 论域的划分,抛开模糊PID理论来说,其实论域的划分很大程度上取决于个人的方法,灵活性很大。你可以认为身高180的人很高、也可以认为较高,甚至可以认为较矮,只是隶属度不同。这些都取决于你的系统,但是常规是均匀划分的,例如这篇博客。然后我自己想了一种方法(适用于7隶属度):半区间宽度=(论域总长度/12)*2,也就是说一个大三角由两个半区间组成。
b. 还有就是隶属度函数命名的时候,最好是有顺序的,单击隶属度函数曲线,设计顺序:mf1->NL;mf2->NM;mf3->NS;mf4->ZE;mf5->PS;mf6->PM;mf7->PL。这样设置的好处是后面添加模糊规则的时候很方便。
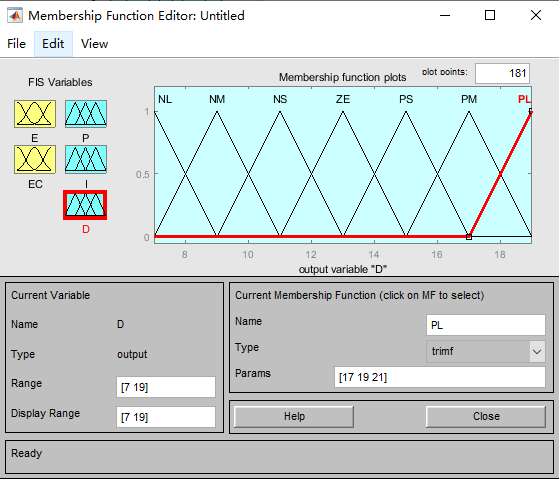
(6)设计PID三个参数的输出隶属度
按照上一篇的介绍,三个参数的隶属度选择范围如下,近似的话建议扩大论域区间:
Kp = [0.32Ku 0.6Ku] = [2.56 4.80] [2,5]
Ki = [0.32Tu 0.47Tu] = [1.1608 1.7050] [1 2] // 这里用[1 2]可能存在结果1的情况,结果2用的[1 3]
Kd = [2Tu 5Tu] = [7.2552 18.1380] [7 19]
按照之前的方法进行划分,获得隶属度函数分布区间:
Kp 的论域划分
| 隶属度 | NL | NM | NS | ZE | PS | PM | PL |
| 区间 | [1.5 2 2.5] | [2 2.5 3] | [2.5 3 3.5] | [3 3.5 4] | [3.5 4 4.5] | [4 4.5 5] | [4.5 5 5.5] |
Ki 的论域划分
| 隶属度 | NL | NM | NS | ZE | PS | PM | PL |
| 区间 | [0.833 1 1.167] | [1 1.167 1.333] | [1.167 1.333 1.5] | [1.333 1.5 1.667] | [1.5 1.667 1.833] | [1.667 1.833 2] | [1.833 2 2.167] |
Kd 的论域划分
| 隶属度 | NL | NM | NS | ZE | PS | PM | PL |
| 区间 | [5 7 9] | [7 9 11] | [9 11 13] | [11 13 15] | [13 15 17] | [15 17 19] | [17 19 21] |
直接复制上去吧!!!!
其实这里还有很多不严谨的地方,比如隶属度论域的计算方法。
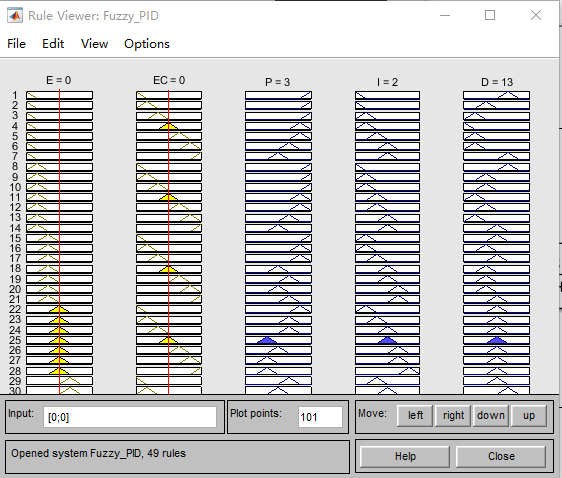
(7)设计模糊规则,这里的设计规则选取的是一篇文献中的规则表,我主要是考虑方便,实际上,这种模糊规则表是决定模糊PID效果的关键之一(还有就是隶属度函数的确定)。如果这里设计的不好,最后出来的PID阶跃响应可能还不如手工调整PID,虽然这种方式对于在线调整是不太可能实现的。调整规则如下,参考文献 [2]。
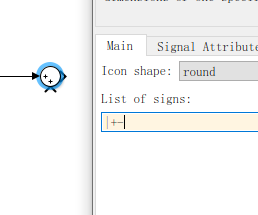
双击下图圈中方框:
调整规则:
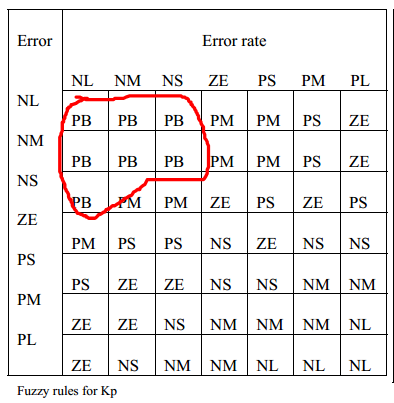
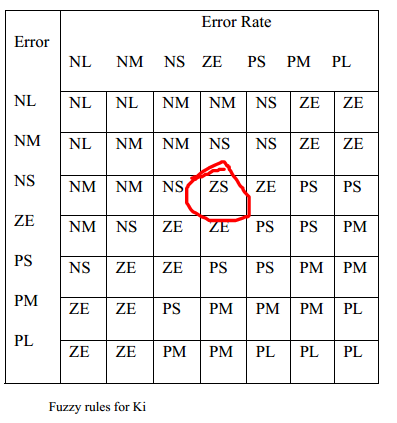

第一个隶属度图中的圈内换成PL,第二个图换成ZE(其实这里不确定,我换的ZE)。
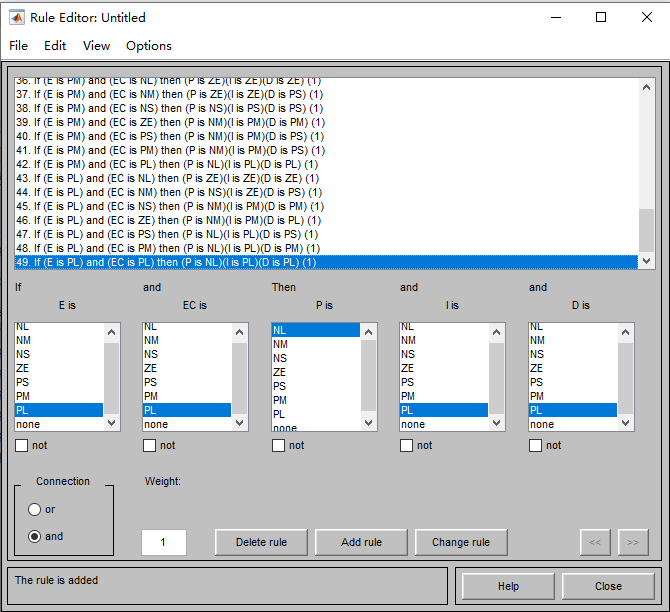
根据隶属度规则表挨个添加进 Rule Editor 即可
(8)导入工作空间
关闭规则编辑器。单击 file-> export -> To file… 命名为Fuzzy_PID.fis -> 保存。
单击 File -> Export -> To workspace -> OK。
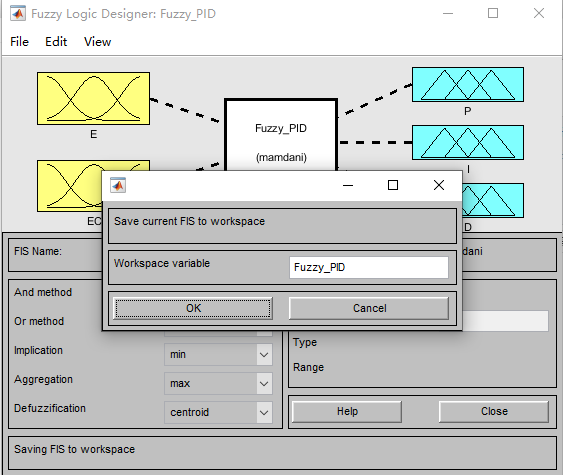
我们会发现在MATLLAB的工作区(Workspace)有来了一个1*1 struct的值。
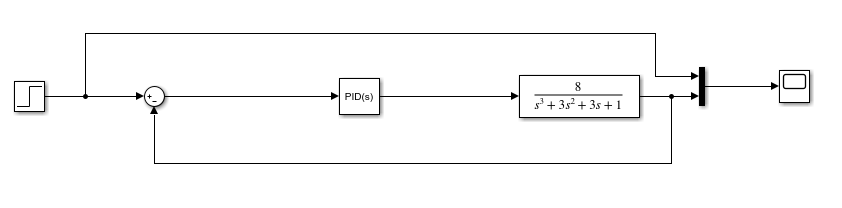
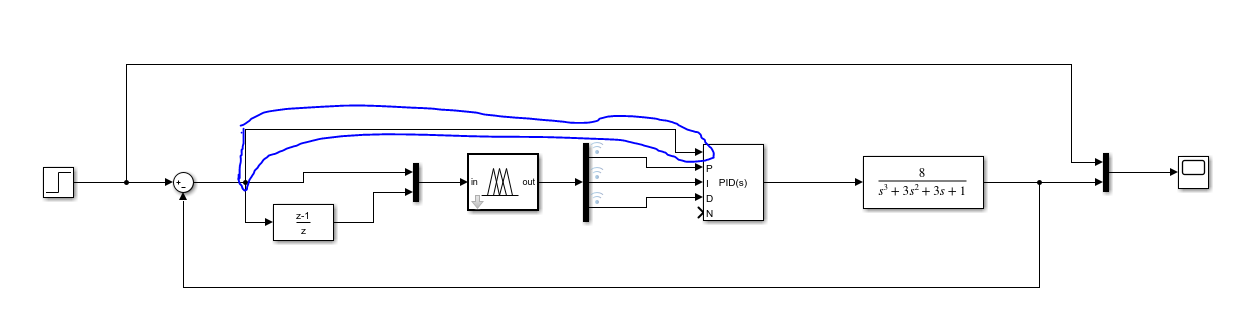
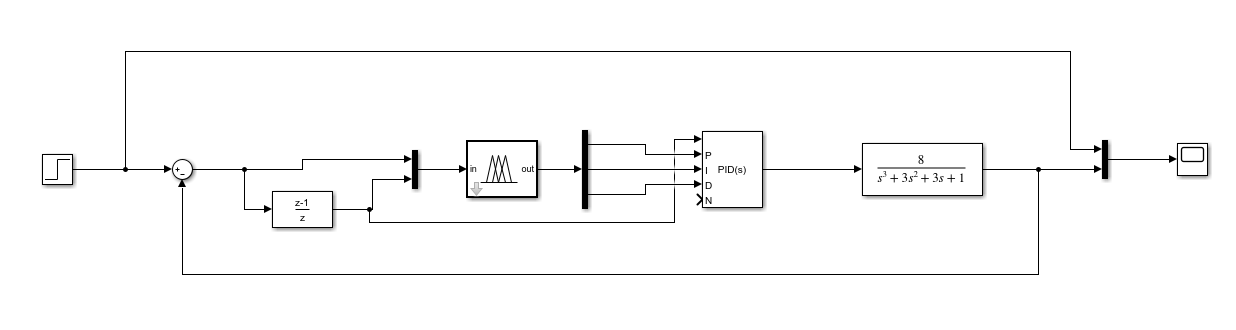
(9)Simulink中进行仿真。
在命令行里输入simulink,或者在MATLAB主页点击Simulink,打开Simulink工具箱。新建一个空白Blank。

在库里面找到Fuzzy Logic Controlller模块,拖到Blank里面。相关的还需要step(阶跃信号),sum(输入输出反馈),PID(一个完整的控制算法块,也可以自己写),mux(用于整合图形),scope(显示结果)。
(10)然后一步一步设置:
双击sum,将sum的配置改为下图:
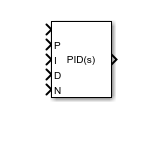
双击PID Controller,使source为external,也就是PID接收外部参数。
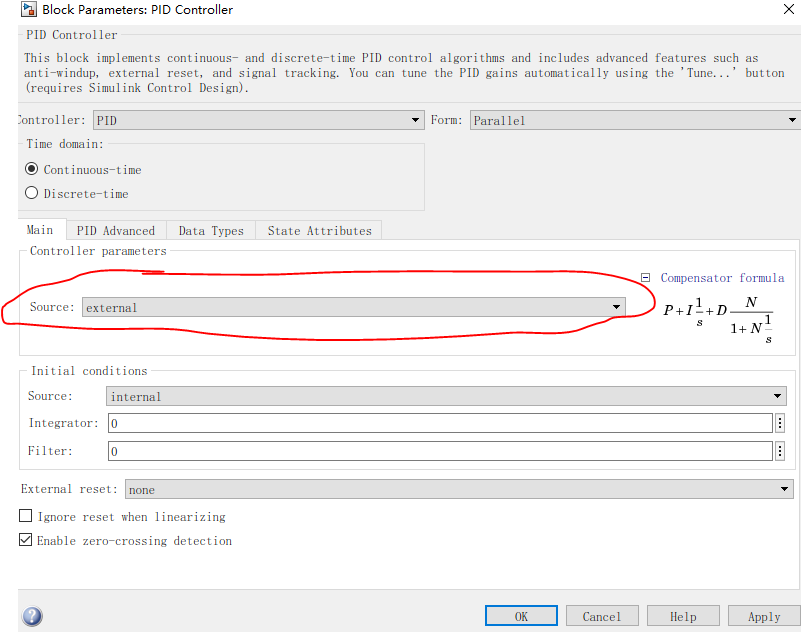
PID改完之后是这样的:
双击传递函数(Transfer Fun),修改如下:

如果显示 num(s)/den(s) 的形式,可以把它放大,和你放大窗口是一样的。
设置Fuzzy controller,同样双击。
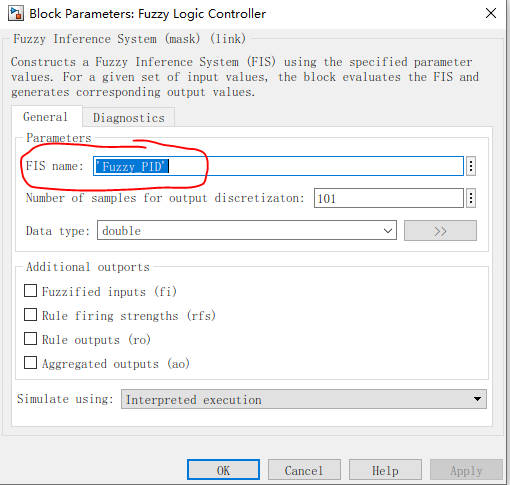
这个名字要和你工作空间的一样才行,有些同学虽然改了,但是还是不成功,可能就是你没能导入到工作空间里面。自寻解决办法(readfis()函数)。
以下为错误
结果1:
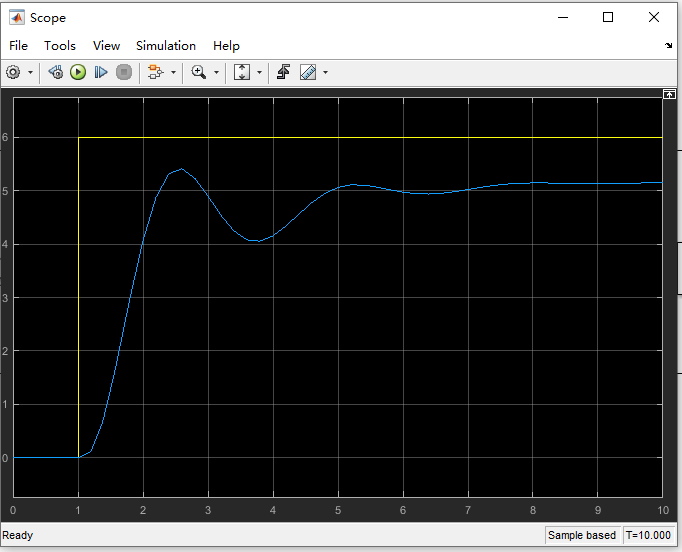
结果2:Ki 的区间从[1,2] 修改为[1,3].
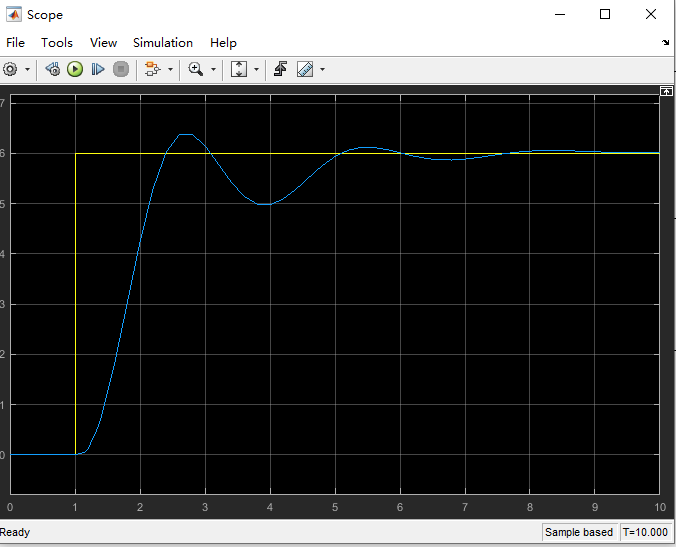
目前结果是这样,我再调一调看看。
不妥之处恳请广大朋友指出。
增加:评论区有位指出积分时间常数和PID系数Ki的问题,这里贴个PID的方程:
典型PID控制器的传递函数为:
而离散PID控制方程可以表示为:
源程序!源程序!GitHub – NidhoghostX/Fuzzy-PID-on-Matlab
CSDN 要收费下载,资源转到Github了。
——————————————————————————————————————————————
更新:
二维模糊PID的matlab仿真(官网教程):Fuzzy PID Control with Type-2 FIS- MATLAB & Simulink
现在在忙,没有时间研究,今后可能会做一下。
参考文献
[1] https://sci-hub.tw/10.1115/1.2899060 (最早经典的PID参数整定文章,大部分文献都会用到)
[2] S. krishna, S. Vasu,Fuzzy PID based adaptive control on industrial robot system,Materials Today: Proceedings,Volume 5, Issue 5, Part 2,2018,Pages 13055-13060.
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/135876.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
