大家好,又见面了,我是你们的朋友全栈君。
论文:http://cn.arxiv.org/pdf/1703.06870v3
推荐参考facebook的开源代码加深理解:https://github.com/facebookresearch/maskrcnn-benchmark
任何问题,请私聊我,优先解答购买专栏的同学~
目录:
4、Experiments: Instance Segmentation
4.2 Ablation Experiments(剥离实验)
4.3. Bounding Box Detection Results
5. Mask R-CNN for Human Pose Estimation
Appendix A: Experiments on Cityscapes
Appendix B: Enhanced Results on COCO
Instance Segmentation and Object Detection
摘要:
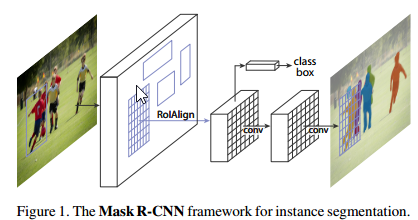
- Mask RCNN可以看做是一个通用实例分割架构。
- Mask RCNN以Faster RCNN原型,增加了一个分支用于分割任务。
- Mask RCNN比Faster RCNN速度慢一些,达到了5fps。
- 可用于人的姿态估计等其他任务;

1、Introduction
- Instance Segmentation(实例分割)不仅要正确的找到图像中的objects,还要对其精确的分割。所以Instance Segmentation可以看做object dection和semantic segmentation的结合。
- Mask RCNN是Faster RCNN的扩展,对于Faster RCNN的每个Proposal Box都要使用FCN进行语义分割。
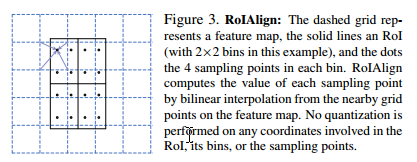
- 引入了RoI Align代替Faster RCNN中的RoI Pooling。因为RoI Pooling并不是按照像素一一对齐的(pixel-to-pixel alignment),也许这对bbox的影响不是很大,但对于mask的精度却有很大影响。使用RoI Align后mask的精度从10%显著提高到50%,第3节将会仔细说明。
- 引入语义分割分支,实现了mask和class预测的关系的解耦,mask分支只做语义分割,类型预测和bbox回归任务交给另一个分支。这与原本的FCN网络是不同的,原始的FCN在预测mask时还用同时预测mask所属的种类。
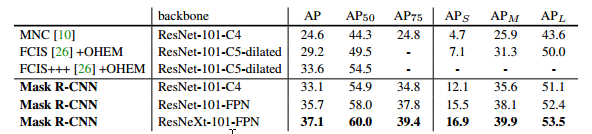
- Mask RCNN就超过了当时所有的state-of-the-art模型。
- 使用8-GPU的服务器训练了两天。
2、Related Work
- 相比于FCIS,FCIS使用全卷机网络,同时预测物体classes、boxes、masks,速度更快,但是对于重叠物体的分割效果不好(为什么不好?)。
3、Mask R-CNN
- Mask R-CNN基本结构:与Faster RCNN采用了相同的two-state结构:首先是通过一阶段网络找出RPN,然后对RPN找到的每个RoI进行分类、定位、并找到binary mask。这与当时其他先找到mask然后在进行分类的网络是不同的。
- Mask R-CNN的损失函数: (当然了,你可以在这里调权以实现更好的效果)
- Mask的表现形式(Mask Representation):因为没有采用全连接层并且使用了RoIAlign,我们最终是在一个小feature map上做分割。
- RoIAlign:RoIPool的目的是为了从RPN网络确定的ROI中导出较小的特征图(a small feature map,eg 7×7),ROI的大小各不相同,但是RoIPool后都变成了7×7大小。RPN网络会提出若干RoI的坐标以[x,y,w,h]表示,然后输入RoI Pooling,输出7×7大小的特征图供分类和定位使用。问题就出在RoI Pooling的输出大小是7×7上,如果RON网络输出的RoI大小是8*8的,那么无法保证输入像素和输出像素是一一对应,首先他们包含的信息量不同(有的是1对1,有的是1对2),其次他们的坐标无法和输入对应起来。这对分类没什么影响,但是对分割却影响很大。RoIAlign的输出坐标使用插值算法得到,不再是简单的量化;每个grid中的值也不再使用max,同样使用差值算法。
-
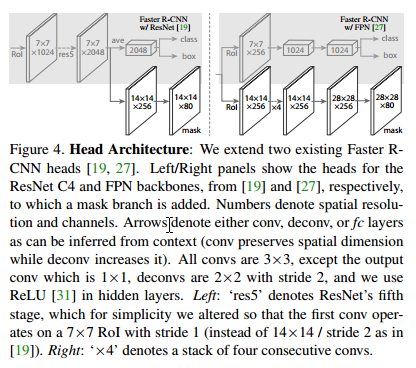
Network Architecture: 为了表述清晰,有两种分类方法
-
使用了不同的backbone:resnet-50,resnet-101,resnext-50,resnext-101;
-
使用了不同的head Architecture:Faster RCNN使用resnet50时,从Block 4导出特征供RPN使用,这种叫做ResNet-50-C4
-
作者使用除了使用上述这些结构外,还使用了一种更加高效的backbone:FPN(特征金字塔网络)
3.1 Implementation Details
使用Fast/Faster相同的超参数,同样适用于Mask RCNN
- Training:
1、与之前相同,当IoU与Ground Truth的IoU大于0.5时才会被认为有效的RoI,只把有效RoI计算进去。
2、采用image-centric training,图像短边resize到800,每个GPU的mini-batch设置为2,每个图像生成N个RoI,在使用ResNet-50-C4 作为backbone时,N=64,在使用FPN作为backbone时,N=512。作者服务器中使用了8块GPU,所以总的minibatch是16, 迭代了160k次,初始lr=0.02,在迭代到120k次时,将lr设定到 lr=0.002,另外学习率的weight_decay=0.0001, momentum = 0.9。如果是resnext,初始lr=0.01,每个GPU的mini-batch是1。
3、RPN的anchors有5种scale,3种ratios。为了方便剥离、如果没有特别指出,则RPN网络是单独训练的且不与Mask R- CNN共享权重。但是在本论文中,RPN和Mask R-CNN使用一个backbone,所以他们的权重是共享的。
(Ablation Experiments 为了方便研究整个网络中哪个部分其的作用到底有多大,需要把各部分剥离开)
- Inference:在测试时,使用ResNet-50-C4作为 backbone情况下proposal number=300,使用FPN作为 backbone时proposal number=1000。然后在这些proposal上运行bbox预测,接着进行非极大值抑制。mask分支只应用在得分最高的100个proposal上。顺序和train是不同的,但这样做可以提高速度和精度。mask 分支对于每个roi可以预测k个类别,但是我们只要背景和前景两种,所以只用k-th mask,k是根据分类分支得到的类型。然后把k-th mask resize成roi大小,同时使用阈值分割(threshold=0.5)二值化
4、Experiments: Instance Segmentation
4.1 Main Results
在下图中可以明显看出,FCIS的分割结果中都会出现一条竖着的线(systematic artifacts),这线主要出现在物体重的部分,作者认为这是FCIS架构的问题,无法解决的。但是在Mask RCNN中没有出现。

4.2 Ablation Experiments(剥离实验)
- Architecture:
从table 2a中看出,Mask RCNN随着增加网络的深度、采用更先进的网络,都可以提高效果。注意:并不是所有的网络都是这样。 - Multinomial vs. Independent Masks:(mask分支是否进行类别预测) 从table 2b中可以看出,使用sigmoid(二分类)和使用softmax(多类别分类)的AP相差很大,证明了分离类别和mask的预测是很有必要的
- Class-Specific vs. Class-Agnostic Masks: 目前使用的mask rcnn都使用class-specific masks,即每个类别都会预测出一个mxm的mask,然后根据类别选取对应的类别的mask。但是使用Class-Agnostic Masks,即分割网络只输出一个mxm的mask,可以取得相似的成绩29.7vs30.3
- RoIAlign: tabel 2c证明了RoIAlign的性能
- Mask Branch:
tabel 2e,FCN比MLP性能更好
4.3. Bounding Box Detection Results
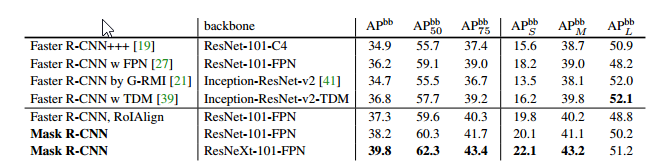
- Mask RCNN精度高于Faster RCNN(为什么呢?分割和bbox检测不是单独分开互不影响吗?难道加上分割分支可以提高bbox检测效果?有空做做实验)
- Faster RCNN使用RoI Align的精度更高
- Mask RCNN的分割任务得分与定位任务得分相近,说明Mask RCNN已经缩小了这部分差距。
4.4. Timing
- Inference:195ms一张图片,显卡Nvidia Tesla M40。其实还有速度提升的空间,比如减少proposal的数量等。
- Training:ResNet-50-FPN on COCO trainval35k takes 32 hours in our synchronized 8-GPU implementation (0.72s per 16-image mini-batch),and 44 hours with ResNet-101-FPN。
5. Mask R-CNN for Human Pose Estimation
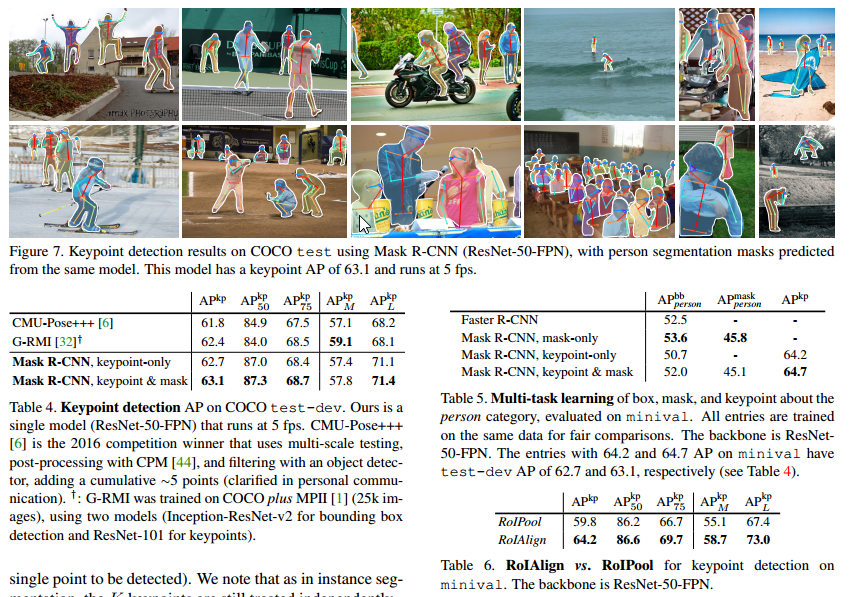
让Mask R-CNN预测k个masks,每个mask对应一个关键点的类型,比如左肩、右肘,可以理解为one-hot形式。
- 使用cross entropy loss,可以鼓励网络只检测一个关键点;
- ResNet-FPN结构
- 训练了90k次,最开始lr=0.02,在迭代60k次时,lr=0.002,80k次时变为0.0002
Appendix A: Experiments on Cityscapes
包含fine annotations images:2975 train ,500 val,1525 test
图片大小 2048×1024
使用COCO的AP作为评价指标
数据十分不平衡!

Implementation:
- 使用ResNet-FPN-50作为back bone,不适用ResNet-FPN-101是因为数据集小,没什么提升。
- 训练时,图像短边从[800,1024]随机选择,可以减小过拟合。
- 在预测时,图像短边都是1024
- 每个GPU的mini-batch为1,共8个GPU
- 训练24k次,初始lr为0.01,18k时减小到0.001,
- 总共训练时间8小时
Results:
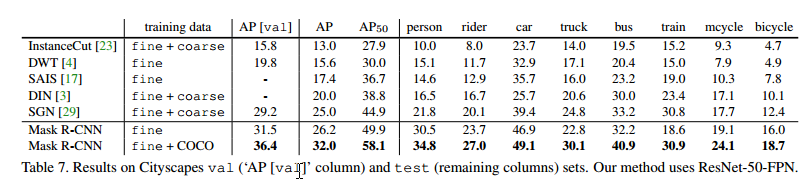
- person和car存在大量的类内重叠,给分割网络提出了挑战,但是Mask-RCNN成功解决了
- 这个数据集十分不平衡,truck,bus,train的数据量很少,所以使用的coco数据集预训练Mask RCNN,分析上表,其他网络预测准确率低也主要低在truck,bus,train三个类别上,所以使用coco预训练还是很有用的。
- 验证数据集val和测试数据集test AP的差距较大,主要原因在于truck,bus,train三类训练数据太少,person,car这种训练数据多的类别就不存在这种现象。即使使用coco数据集进行预训练也无法消除这种bias。
Appendix B: Enhanced Results on COCO
Instance Segmentation and Object Detection
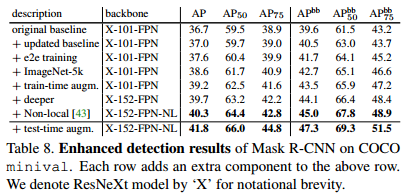
使用一些技巧,可提高精度。可以在这里找到之后的更新:https://github.com/facebookresearch/Detectron
-
Updated baseline:使用不同的超参数,延长迭代次数至180k次,初始学习率不变,在120k和160k时减小10倍,NMS的阈值从默认的0.3改为0.5。
-
End-to-end training:之前的学习都是先训练RPN,然后训练Mask RCNN。
-
ImageNet-5k pre-training: 数据量比coco增加了5倍,预训练更有效
-
Train-time augmentation:训练数据增强
-
Model architecture:使用152-layer的ResNeXt
-
Non-local:
-
Test-time augmentation:
Keypoint Detection
简单说下,如果你已经理解了maskrcnn中分割的实现方式:分割head的最后的输出是一个channel为1的feature map,feature map的尺寸是[56, 56]
我们只需要简单的变化一下,加入我们有k个keypoint,那我们只需要把 分割head 最后一个输出channel设置为k,这k个feature map每个预测一个keypoint位置。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/135806.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
