大家好,又见面了,我是你们的朋友全栈君。
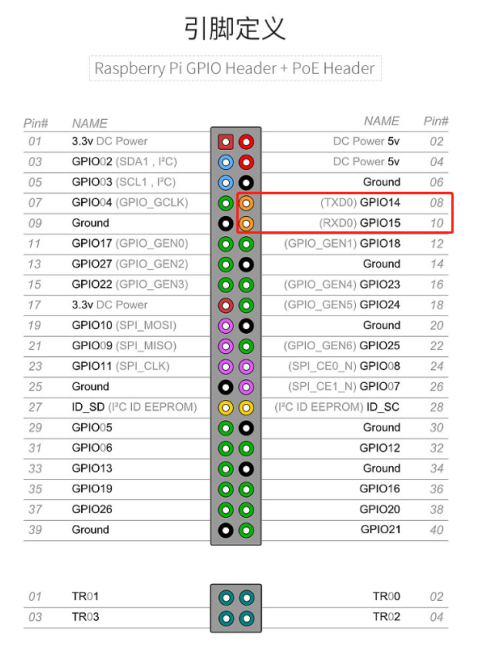
外设IO口定义说明
从树莓派的相关资料我们可以看到,树莓派有两个串口可以使用,一个是硬件串口(/dev/ttyAMA0),另一个是mini串口(/dev/ttyS0)。硬件串口有单独的波特率时钟源,性能好,稳定性强;mini串口功能简单,稳定性较差,波特率由CPU内核时钟提供,受内核时钟影响。
树莓派(3/4代)板载蓝牙模块,默认的硬件串口是分配给蓝牙模块使用的,而性能较差的mini串口是分配给GPIO串口 TXD0、RXD0。

Serial 配置
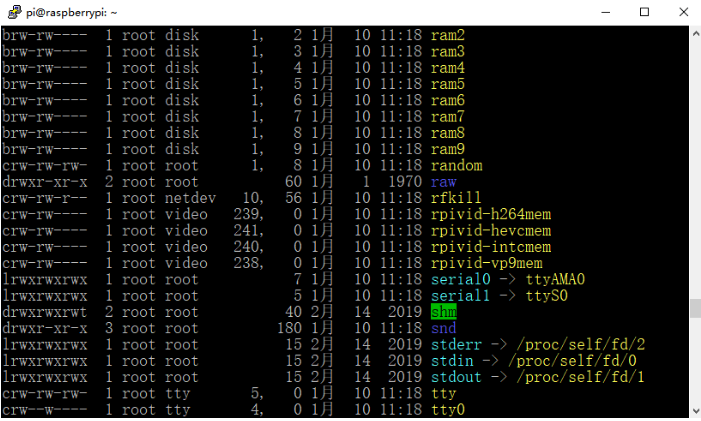
首先运行ls /dev -al命令查看到默认的串口分配方式,如下图所示:
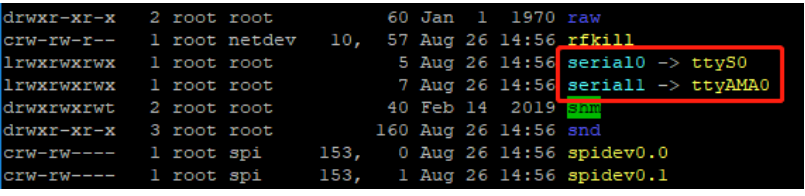
由于硬件串口分配给板载蓝牙使用,所以要释放掉,并设置硬件串口分配给GPIO串口。
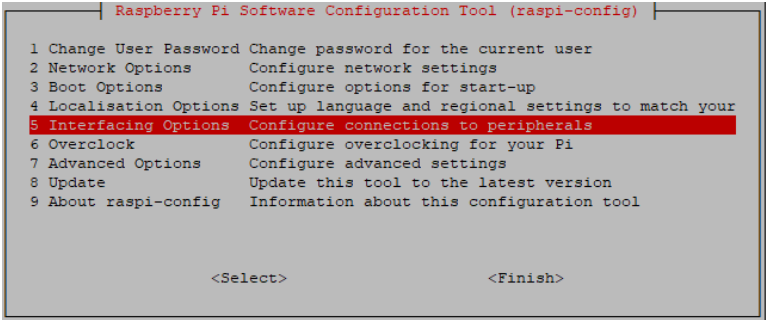
首先登陆终端后,输入sudo raspi-config命令进入树莓派系统配置界面,选择第五个Interfacing Options:
进入P6 Serial
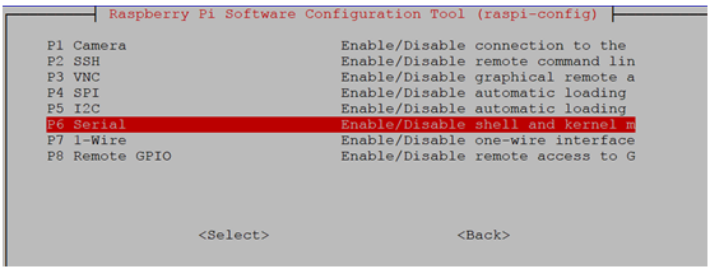
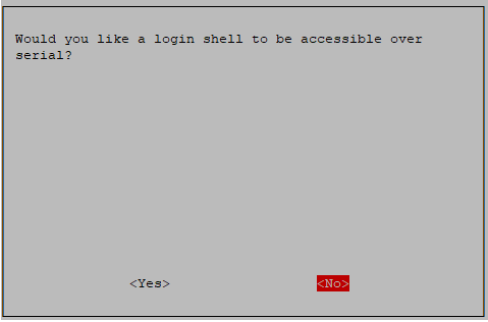
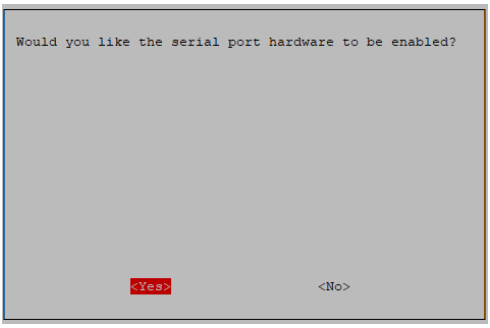
选择关闭串口登录功能,打开硬件串口调试功能:
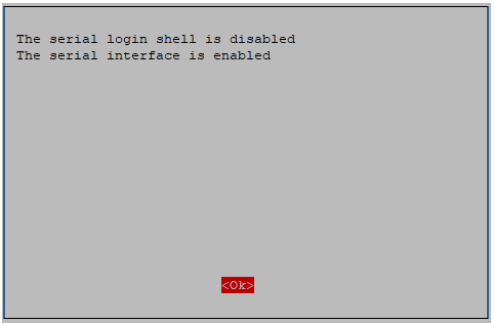
完成后提示以下界面,按OK
设置硬件串口为GPIO串口
接着将串口配置为我们的GPIO串口,对输入sudo vim /boot/config.txt命令,将下面两行内容添加到最后:dtoverlay=pi3-miniuart-bt force_turbo=1
修改后保存并退出,内容如下图片所示:

重启树莓派后,再次输入ls /dev -al,可以看到两个串口已经互相换了位置:
minicom串口助手测试
首先输入sudo apt-get install minicom命令安装minicom,安装完成后,输入minicom -D /dev/ttyAMA0 -b 9600启动minicom,如图所示:
其中-D表示选择串口/dev/ttyAMA0,-b 设置波特率为9600,此参数可以不用设置,默认11520,并且退出minicom时需要先按Ctrl+A,再按Z,弹出以下菜单,0。
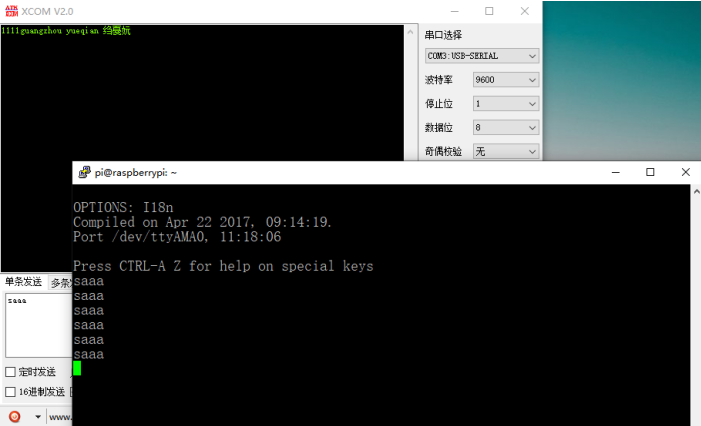
将树莓派与TTL对应接上,就可以通过PC串口助手与树莓派互相发送、接收数据,但是树莓派在发送数据时,命令终端并不会显示,如下图所示:
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/134450.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
