大家好,又见面了,我是你们的朋友全栈君。
背景
写本篇文章的时候只是模型设计完成以及部分零件进行了采购,最终是否能实现不能确定,某些图片过于辣眼,请多担待。
继续之前的智能车制作,我的想法是一个多功能的智能小车它至少得有手有眼吧,所以继摄像头云台的制作结束后我又进行了机械臂的设计,最初对于机械臂的了解真的是非常的少,当时的想法是一个关节一个舵机呗,大概是这样: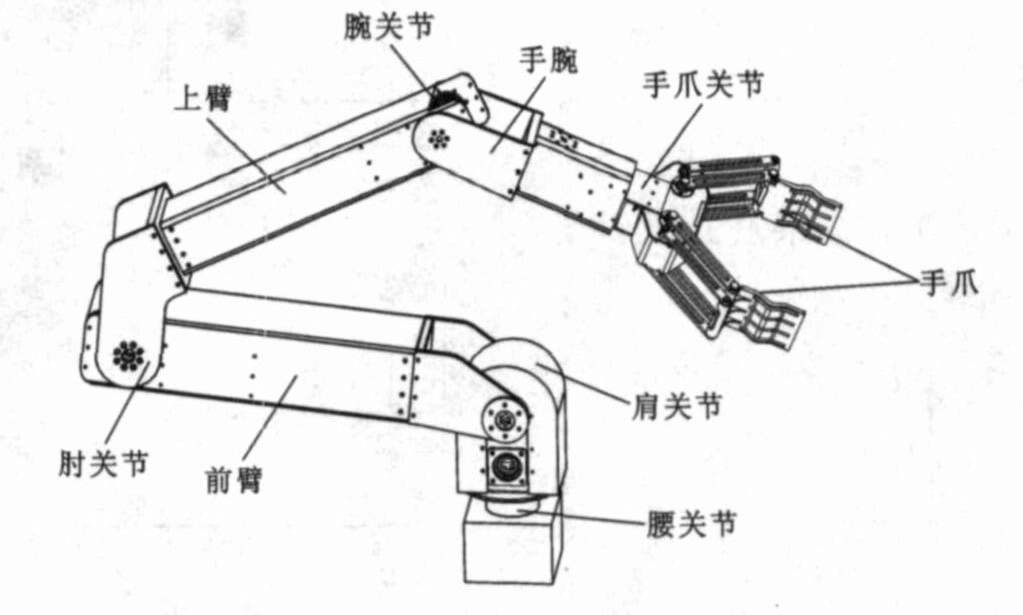

但是我觉得这样有点丑,而且这样的话用的舵机也不少,不是很物美价廉,所有我又找到了这种结构:

这个看起来就很不错了,之后又查了些其他的机械臂,发现结构都是大同小异的,基本上就分成上边那两种,最后我选择了第二种。
机械臂的材料我准备用切割的2mm不锈钢板和一些标准件(我认为能在淘宝上直接买到的,并且有尺寸的就是标准件。)
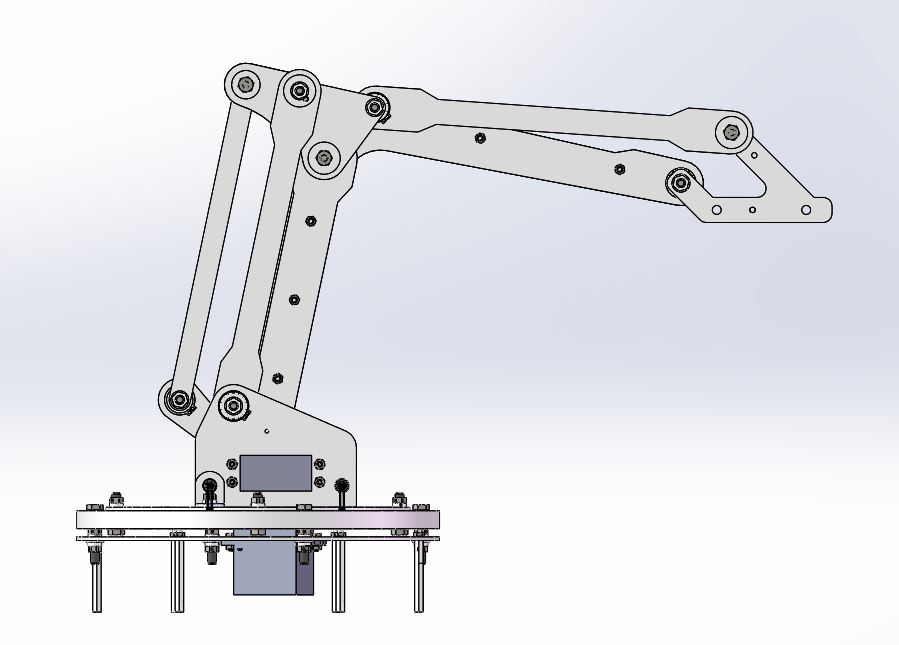
最终设计出模型:
底座设计
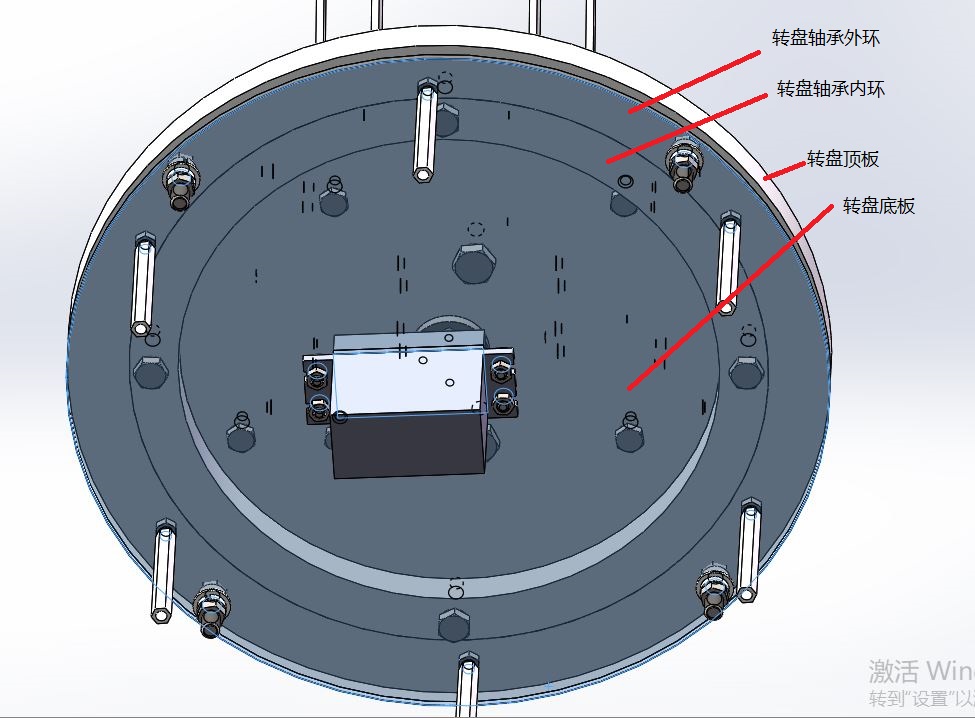
首先是平面旋转的问题,从图片上根本看不出是个什么样的结构,所以只能是自己找,说到这里不得不说淘宝是一个好东西,最后我找到了这个:

真是踏破特写无觅处,得来全部费功夫,最后选择了一款尺寸差不多的,孔是通孔,可以用来放置螺栓,并且内外环都有孔,妥妥就是为平台设计的。

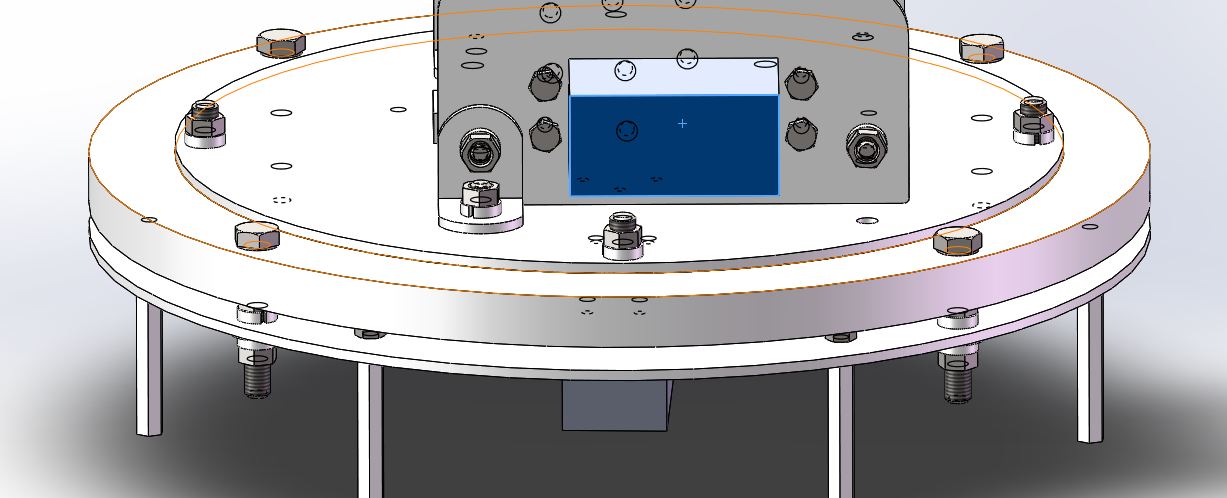
这样我们的底座问题就解决了,只需要固定一下,然后加上舵机就好了,模型并没有渲染或者上材质,看懂就好了,这里用了一个舵机,产生一个自由度。
机械臂设计
这里用到一些机械原理的知识,我画了一个结构简图帮助分析,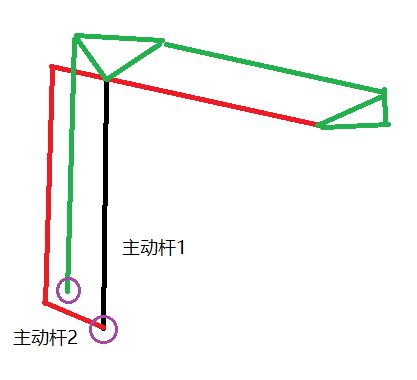
其中紫色圆圈是与底座相连接的固定点,红色和黑色的线表示主动的杆,绿色线表示从动,我们先看绿色线,这里有两个三角形,三角形我们都知道形状是稳定的,同时还能看出有两个四边形,现在我把它单独画出来
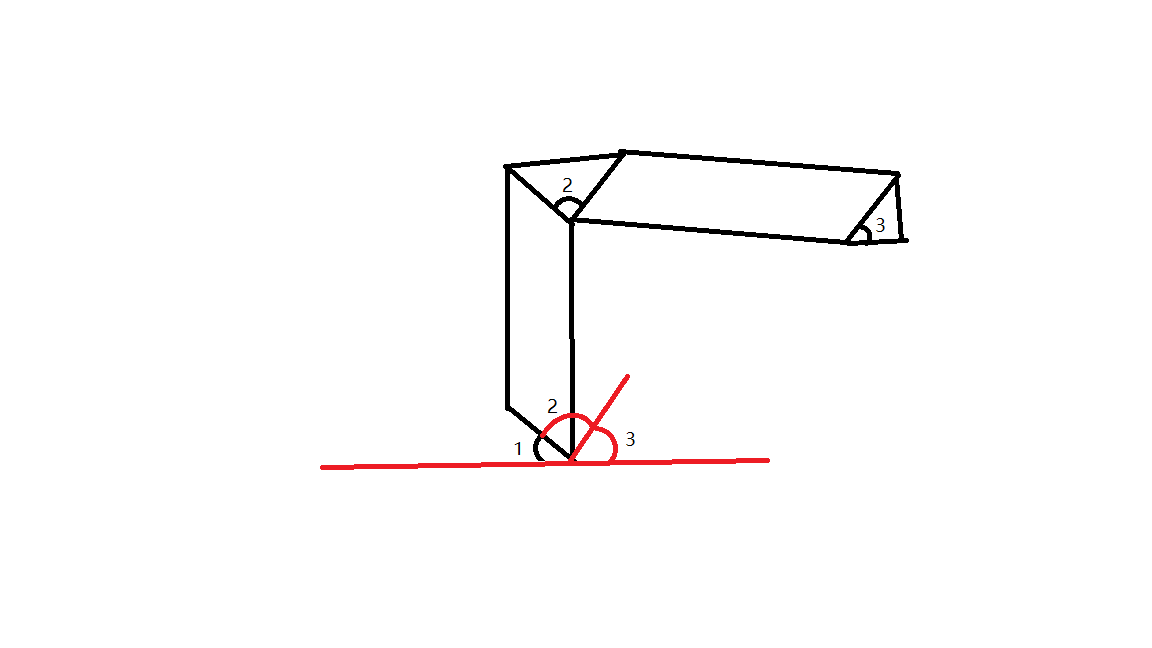
角2角3都是三角形的角,所以固定不变,而角1的两条边也是固定在底座上的,所以角1也不变,再通过平行四边形定理,我们很容易的就能将三个角放到一起,最后通过我们的设计将这三个角的总和设为180°,这样设计有什么好处呢,好处就是角3的下边永远是与水平线保持180°,也就是永远平行于平面。当然,如果有特殊的需求,比如要与平面保持45°角,可以相加成135°或者225°,原理都是一样的。
看懂了从动部分,主动杆部分就很简单了,红色部分就是一个平行四边形,黑色部分就是一个杆,最后我们做出了成品,现在看这个图是不是就感觉很熟悉了,完全符合前边的结构简图。
关节连接方式
说实话这里也把我难住了,本来我是想用卧式轴承座和法兰座进行连接的,事实证明可以是可以,不过会显得很臃肿,很累赘,而且会大大的增加机械臂的重量,查了查百度发现没有,最后只能寄托于淘宝了,看看别人怎么弄的

真就只用一个轴承呗,转是肯定能转的,但是怎么防止零件轴向移动我是一点也没看出来,能看出这是一个挡边轴承,自己也试验了一下,发现无论怎么安装,零件的另一端都是都是活动的,因为看不到细节,所以我也就放弃了,最后想到了一个老赖的方法,卡簧,这样灵魂就有了,请原谅我及其不严谨的画风,要问原因就是懒。
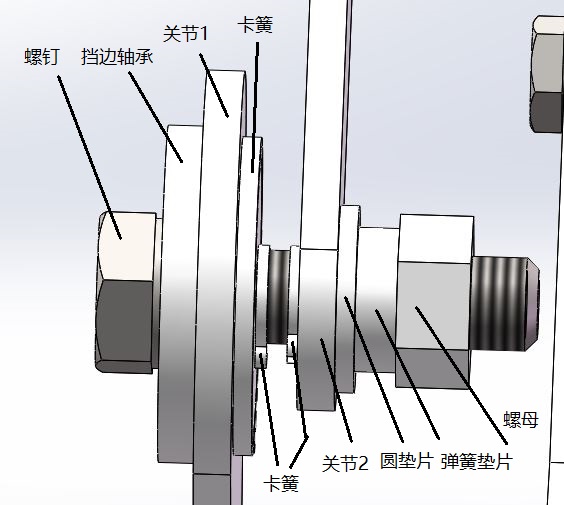
这样就能保证两个关节的灵活转动,而且没有轴向移动了。
底座与机械臂的连接方式
这里因为要承受竖直方向上的力,而且如果机械臂抓取东西后这里收到的力会更大,所以我没有选择让舵机直接承受所有的力,而是选择了一个立式轴承座+光轴法兰座的方式
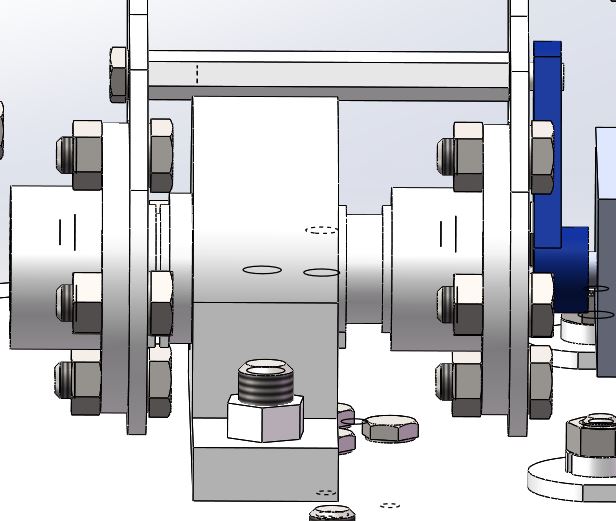
大概就是这个样子,也没有什么原理可以讲的样子
效果
众所周知,solidworks做动画强的一匹,所以我并没有做动画,只进行了鼠标的拖拽
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/134159.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
