大家好,又见面了,我是你们的朋友全栈君。
双边滤波算法原理:
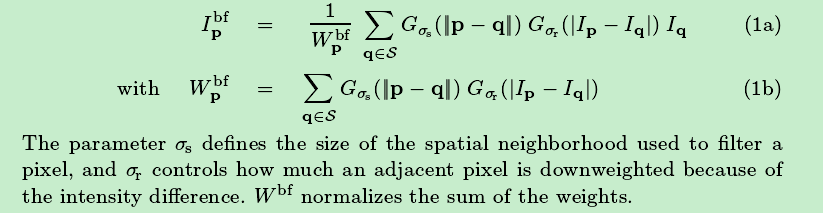
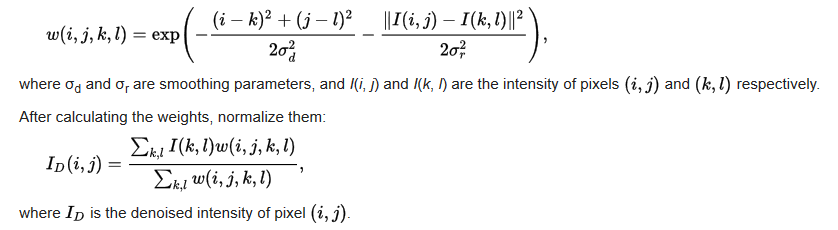
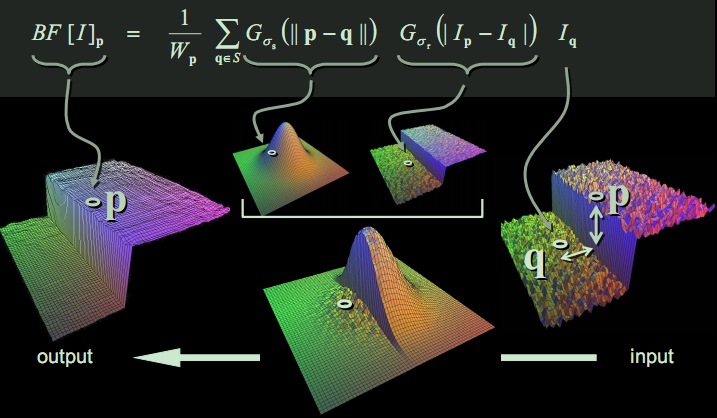
双边滤波是一种非线性滤波器,它可以达到保持边缘、降噪平滑的效果。和其他滤波原理一样,双边滤波也是采用加权平均的方法,用周边像素亮度值的加权平均代表某个像素的强度,所用的加权平均基于高斯分布[1]。最重要的是,双边滤波的权重不仅考虑了像素的欧氏距离(如普通的高斯低通滤波,只考虑了位置对中心像素的影响),还考虑了像素范围域中的辐射差异(例如卷积核中像素与中心像素之间相似程度、颜色强度,深度距离等),在计算中心像素的时候同时考虑这两个权重。 公式1a,1b给出了双边滤过的操作,Iq为输入图像,Ipbf为滤波后图像:

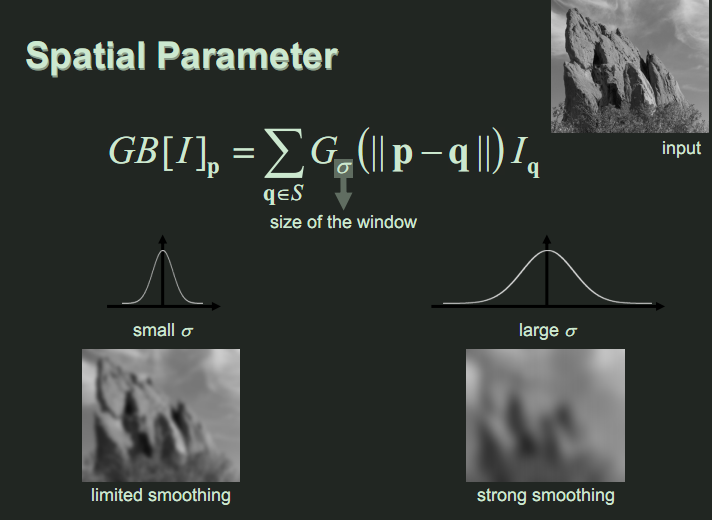
mark下双边滤波里的两个权重域的概念:空间域(spatial domain S)和像素范围域(range domain R),这个是它跟高斯滤波等方法的最大不同点。下面是我找到的对比说明,更好地理解双边滤波,首先是高斯滤波的情况:
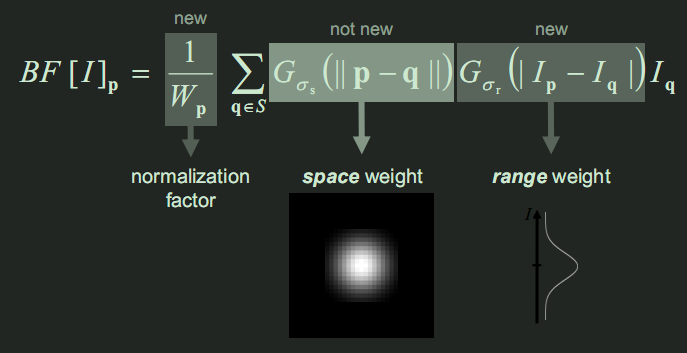
然后对比再看一下双边滤波的过程:
双边滤波的核函数是空间域核与像素范围域核的综合结果:在图像的平坦区域,像素值变化很小,对应的像素范围域权重接近于1,此时空间域权重起主要作用,相当于进行高斯模糊;在图像的边缘区域,像素值变化很大,像素范围域权重变大,从而保持了边缘的信息。
为了更加形象的说明两个权重的影响,作者还给出了二维图像的直观说明:
双边滤波算法实现:
在原理部分,从双边滤波的公式就可以得到该算法的实现途径。由于直接的编码实现上述过程,其时间复杂度为O(σs2) ,比较耗时,所以后来出现了一些改进算法,比较经典的有:论文《Fast O(1) bilateral filtering using trigonometric range kernels》,提出了用Raised cosines函数来逼近高斯值域函数,并利用一些特性把值域函数分解为一些列函数的叠加,从而实现函数的加速[5,8]。
这里只对原始方法进行实现,从而有助于更加清楚的了解算法的原理。
matlab实现方法,这里也附一下核心代码:
function output = bilateralFilter( data, edge, sigmaSpatial, sigmaRange, ...
samplingSpatial, samplingRange )
if ~exist( 'edge', 'var' ),
edge = data;
end
inputHeight = size( data, 1 );
inputWidth = size( data, 2 );
if ~exist( 'sigmaSpatial', 'var' ),
sigmaSpatial = min( inputWidth, inputHeight ) / 16;
end
edgeMin = min( edge( : ) );
edgeMax = max( edge( : ) );
edgeDelta = edgeMax - edgeMin;
if ~exist( 'sigmaRange', 'var' ),
sigmaRange = 0.1 * edgeDelta;
end
if ~exist( 'samplingSpatial', 'var' ),
samplingSpatial = sigmaSpatial;
end
if ~exist( 'samplingRange', 'var' ),
samplingRange = sigmaRange;
end
if size( data ) ~= size( edge ),
error( 'data and edge must be of the same size' );
end
% parameters
derivedSigmaSpatial = sigmaSpatial / samplingSpatial;
derivedSigmaRange = sigmaRange / samplingRange;
paddingXY = floor( 2 * derivedSigmaSpatial ) + 1;
paddingZ = floor( 2 * derivedSigmaRange ) + 1;
% allocate 3D grid
downsampledWidth = floor( ( inputWidth - 1 ) / samplingSpatial ) + 1 + 2 * paddingXY;
downsampledHeight = floor( ( inputHeight - 1 ) / samplingSpatial ) + 1 + 2 * paddingXY;
downsampledDepth = floor( edgeDelta / samplingRange ) + 1 + 2 * paddingZ;
gridData = zeros( downsampledHeight, downsampledWidth, downsampledDepth );
gridWeights = zeros( downsampledHeight, downsampledWidth, downsampledDepth );
% compute downsampled indices
[ jj, ii ] = meshgrid( 0 : inputWidth - 1, 0 : inputHeight - 1 );
di = round( ii / samplingSpatial ) + paddingXY + 1;
dj = round( jj / samplingSpatial ) + paddingXY + 1;
dz = round( ( edge - edgeMin ) / samplingRange ) + paddingZ + 1;
% perform scatter (there's probably a faster way than this)
% normally would do downsampledWeights( di, dj, dk ) = 1, but we have to
% perform a summation to do box downsampling
for k = 1 : numel( dz ),
dataZ = data( k ); % traverses the image column wise, same as di( k )
if ~isnan( dataZ ),
dik = di( k );
djk = dj( k );
dzk = dz( k );
gridData( dik, djk, dzk ) = gridData( dik, djk, dzk ) + dataZ;
gridWeights( dik, djk, dzk ) = gridWeights( dik, djk, dzk ) + 1;
end
end
% make gaussian kernel
kernelWidth = 2 * derivedSigmaSpatial + 1;
kernelHeight = kernelWidth;
kernelDepth = 2 * derivedSigmaRange + 1;
halfKernelWidth = floor( kernelWidth / 2 );
halfKernelHeight = floor( kernelHeight / 2 );
halfKernelDepth = floor( kernelDepth / 2 );
[gridX, gridY, gridZ] = meshgrid( 0 : kernelWidth - 1, 0 : kernelHeight - 1, 0 : kernelDepth - 1 );
gridX = gridX - halfKernelWidth;
gridY = gridY - halfKernelHeight;
gridZ = gridZ - halfKernelDepth;
gridRSquared = ( gridX .* gridX + gridY .* gridY ) / ( derivedSigmaSpatial * derivedSigmaSpatial ) + ( gridZ .* gridZ ) / ( derivedSigmaRange * derivedSigmaRange );
kernel = exp( -0.5 * gridRSquared );
% convolve
blurredGridData = convn( gridData, kernel, 'same' );
blurredGridWeights = convn( gridWeights, kernel, 'same' );
% divide
blurredGridWeights( blurredGridWeights == 0 ) = -2; % avoid divide by 0, won't read there anyway
normalizedBlurredGrid = blurredGridData ./ blurredGridWeights;
normalizedBlurredGrid( blurredGridWeights < -1 ) = 0; % put 0s where it's undefined
blurredGridWeights( blurredGridWeights < -1 ) = 0; % put zeros back
% upsample
[ jj, ii ] = meshgrid( 0 : inputWidth - 1, 0 : inputHeight - 1 ); % meshgrid does x, then y, so output arguments need to be reversed
% no rounding
di = ( ii / samplingSpatial ) + paddingXY + 1;
dj = ( jj / samplingSpatial ) + paddingXY + 1;
dz = ( edge - edgeMin ) / samplingRange + paddingZ + 1;
% interpn takes rows, then cols, etc
% i.e. size(v,1), then size(v,2), ...
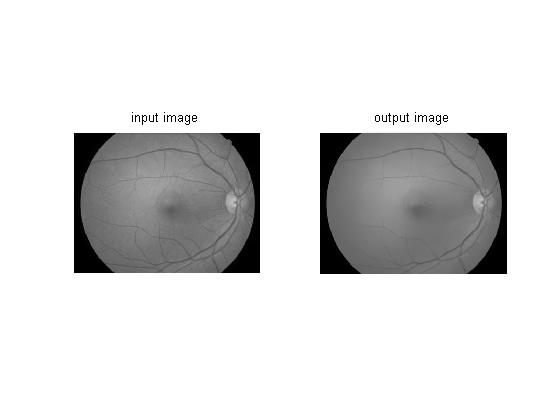
output = interpn( normalizedBlurredGrid, di, dj, dz );双边滤波算法实例:
%% 测试函数,其中参数设置请参见函数注释
clc,clear all,close all;
ori=imread('D:\proMatlab\vessel_edge_extration\image\3.jpg');
ori=double(rgb2gray(ori))/255.0;
[width, height]=size(ori);
sigmaSpatial = min( width, height ) / 30;
samplingSpatial=sigmaSpatial;
sigmaRange = ( max( ori( : ) ) - min( ori( : ) ) ) / 30;
samplingRange= sigmaRange;
output = bilateralFilter( ori, ori, sigmaSpatial, sigmaRange, ...
samplingSpatial, samplingRange );
figure,
subplot(1,2,1),imshow(ori,[]);title('input image');
subplot(1,2,2),imshow(output,[]);title('output image');
参考:
- https://en.wikipedia.org/wiki/Bilateral_filtering
- http://people.csail.mit.edu/sparis/bf_course/
- http://people.csail.mit.edu/sparis/bf/
- http://blog.csdn.net/fightingforcv/article/details/52723376
- http://blog.csdn.net/mumusan2016/article/details/54578038
- http://blog.csdn.net/majinlei121/article/details/50463514
- http://kaiminghe.com/eccv10/index.html (Guided Image Filtering)
- http://blog.csdn.net/dangchangying/article/details/14451963
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/134054.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
