大家好,又见面了,我是你们的朋友全栈君。
前言
嵌入式知识点复习一
1、 嵌入式系统的一般组成结构
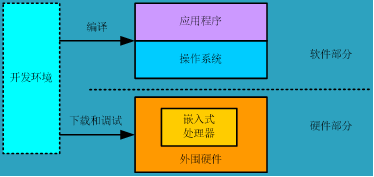

2、嵌入式硬件系统的结构
(1)嵌入式处理器+外围硬件
(2)常见的外围硬件:电源、时钟、内存、I/O、通信、调试;
3、嵌入式处理器
(1)ARM、S3C6410、STM32单片机、华为海思、高通骁龙等
(2)Intel /AMD 都不是嵌入式处理器
4、嵌入式操作系统
功能:
种类:嵌入式linux;WinCE;Vxworks;μC/OS-II;Android;IOS。注意:linux不是嵌入式操作系统;MAC OS WINDOWS XP/7/8/10都不是
嵌入式知识点复习二 –体系结构
1、ARM:ADVANCED RISC MACHINES,是一款嵌入式微控制器,也是一家嵌入式处理器设计厂商。设计高性能、低功耗的嵌入式处理器。
2、ARM微处理器工作状态:两种指令对应两种状态(通常情况)
(1)Thumb状态、ARM状态;
(2)32位定长ARM指令,16位定长Thumb指令。
(3)ARM1176支持ARM指令、Thumb指令、Jazelle指令,故有三种状态:ARM状态、Thumb状态、Jazelle状态。
3、异常:
(1)处理器执行某些区别于用户指令的任务,如中断处理、复位、调试等;为了区分用户指令,因此称为异常;
(2)异常的种类与类型(1176为例):7种,中断(IRQ)、快中断(FIQ)、未定义(Undef)、数据中止(DABT)、预取指中止(PABT)、软中断、复位(reset)
4、工作模式:根据系统执行正常或异常指令不同,分为8种工作模式:用户模式、系统模式、中断模式、快中断模式、未定义模式、中止模式(对应数据中止异常、预取指中止)、SVC管理模式(软中断、复位)、SM安全监视器模式。
5、寄存器:
(1)ARM处理器均为32位寄存器;
(2)ARM1176寄存器数量:40个
(3)ARM1176寄存器包括:未分组寄存器、分组寄存器、CPSR、SPSR;
(4)未分组寄存器(所有模式通用):9个,R0~R7;R15(PC)
(5)分组寄存器(不同工作模式下专用,不同模式稍有不同):
① R8~R14;
② 6个不同模式下的SPSR寄存器:SPSR_irq,SPSR_fiq,SPSR_abt,
SPSR_und,SPSR_svc,SPSR_mon
(6)可复用寄存器:
① SP堆栈指针寄存器-R13,用于保存子程序调用或异常处理的临时数据;
② LR连接寄存器-R14,用于保存子程序调用或异常处理时,主程序调用指令/中断跳转指令的下一条指令的入口地址,以便于恢复主程序;
③ PC程序计数器-P15,用于保存要执行的指令的地址。
(7)PSR程序状态寄存器:
① 包括CPSR当前程序状态寄存器和SPSR备份的程序状态寄存器;
② CPSP用于保存当前模式下处理器模式、状态、中断使能、大小端模式及条件位等信息;
③ SPSR用于备份异常发生前的CPSR寄存器的值,以便异常处理结束时能返回用户程序状态。
6、ARM支持两种中断:IRQ和FIQ
7、ARM数据存储格式:大端(big endian)和小端(little endian)
8、采用RISC架构的ARM微处理器一般具有如下特点:
① 体积小、低功耗、低成本、高性能;
② 支持Thumb(16位)/ARM(32位)双指令集,能很好地兼容8位/16位器件;
③ 大量使用寄存器,指令执行速度更快;
④ 大多数数据操作都在寄存器中完成;
⑤ 寻址方式灵活简单,执行效率高;
⑥ 指令长度固定;
⑦ 指令支持按 条件执行;
⑧ 内存访问采用load/store实现。
嵌入式知识点复习三 –ARM-LINUX嵌入式开发环境
一、交叉开发模式
1、组成结构
(1)宿主机:开发主机,一般由PC、发行版linux系统、开发工具(本地及交叉编译)(代码编辑器Vi,编译器GCC、调试器GDB、工程管理器MAKE、NFS等)组成;
(2)目标机:嵌入式系统,一般由ARM硬件、BOOTLOADER、内核、根文件系统构成;
(3)连接工具:串口线、网线、USB线等。
2、理解编译工具链与交叉编译工具链的异同
(1)相同点:
① 用于支持的语言的编译、链接与调试,编译器用法相同;
② 通常都有编译器、链接器、调试器、库及其他二进制工具构成。
(2)不同点:
① 编译工具链一般用于本机编译、本机执行的开发模式;
② 交叉编译工具链用于宿主机编译,目标机运行的交叉开发模式;
③ 编译器一般Linux发行版都配备,直接调用gcc命令即可;
④ 交叉编译器一般需根据宿主机软硬件环境,进行gcc、相关库、工具进行有针对性的定制。
⑤ 实验室使用的OK6410开发板定制的编译器为32位的,其交叉编译工具链主要arm-linux-gcc,arm-linux-g++arm-linux-gdb等构成。
二、开发工具的用法
1、Vi的工作模式及其切换-掌握使用Vi完成源代码编辑、保存及退出的常见按键操作;
2、GCC:GNU Compiler Collection,GUN编译器套件,特点:
① 支持绝大多数高级语言的编译,既支持传统的C/C++,Fortan,Objective-C ,也支持java,python,go等语言;
② 支持汇编语言;
③ 支持绝大多数的主流处理器平台;
④ 便于构建交叉编译工具链。
3、gcc/arm-linux-gcc用法:
① 基本用法:gcc hello.c;arm-linux-gcc hello.c;输出a.out
② 推荐用法:gcc hello.c -o hello/arm-linux-gcc hello.c -o hello ,可以指定输出文件名称;
③ 主要的编译参数
-Wall 打印全部警告信息;
-O{0-3,s} 支持代码优化,0无优化;
-g 支持gdb调试;
-lpthread 支持多线程。
4、make及Makefile
(1)make:工程管理器,利用执行Makefile文件实现工程管理(编译、链接、生成工程镜像、安装、清理、卸载等);
(2)make用法:编写Makefile,在终端下执行make命令即可。
(3)Makefile文件编写示例:
一个工程,2个源文件testa.c ,testb.c,一个头文件testb.h,编译器为arm-linux-gcc,生成的可执行文件为test,需支持代码优化、打印警告信息,支持gdb调试等编译选项,其Makefile文件如下:
SRC=testa.testb b.c testb.h
EXEC=test
CC=arm-linux-gcc
CFLAGS=-Wall -O2 -g
( E X E C ) : (EXEC): (EXEC):(SRC)
$(CC) $(SRC) -o $(EXEC) $(CFLAGS)
嵌入式知识点复习四 –arm-linux文件编程
1、linux文件编程概述
(1)文件描述符:Linux中文件分为4种:普通文件、目录文件、链接文件、设备文件要区分这些文件就要了解“文件描述符”;
文件描述符是一个非负的整数,他是一个索引值,并指向内核中每个进程打开文件的记录表。当打开一个现存文件或创建一个新文件时,内核就向进程返回一个文件描述符,当需要读/写文件时,也需要把文件描述符作为参数传递给相应的函数。
(2)基本I/O操作
Linux的输入/输出(I/O)操作,通常为5个方面:打开,读取,写入,和关闭
对应的有5个系统调用:
open,read,write,close,lseek
所需要的头文件:
#include <sys/types.h>
#include <unistd.h>
1.open函数
open函数的原型如下:
int open(const char *pathname, int flags, mode_t mode)
函数传入参数含义如下:
pathname:为字符串,表示被打开的文件名称,可以包含路径。
flags :为一个或多个标志,表示文件的打开方式,常用标志如表所示:
O_RDONLY 只读方式打开
O_WRONLY 只写方式打开
O_RDWR 读/写方式打开
O_CREAT 如果文件不存在,就创建新的文件
O_EXCL 如果使用O_CREAT时文件存在,则可返回错误消息
O_TRUNC 如果文件已存在,且以只读或只写成功打开,则先全部删除文件中原有的数据
O_APPEND 以添加方式打开文件,在打开文件的同时,文件指针指向文件的末尾、
注意:在open函数中,flags参数可以用过“|”组合而成,O_RDONLY,O_WRONLY,O_RDWR这三种方式是互斥的,不可同时使用,因此这3个参数只能出现一个。
mode 被打开文件的存取权限模式,可以使用八进制数来表示新文件的权限,也可以采用<sys/stat.h>中定义的符号常量,当打开已有文件时,将忽略这个参数,函数返回值:成功则返回文件描述符,出错返回-1。
文件模式符号常量:
S_IRWXU 00700 所属用户读。写和执行权限
S_IRUSR 00400 所属用户读权限
S_IWUSR 00200 所属用户写权限
S_IXUSR 00100 所属用户执行权限
S_IRWXG 00070 组用户读,写和执行权限
S_IRGRP 00040 组用户读权限
S_IWGRP 00020 组用户写权限
S_IXGRP 00010 组用户执行权限
S_IRWXO 00007 其他用户读,写和执行权限
S_IROTH 00004 其他用户读权限
S_IWOTH 00002 其他用户写权限
S_IXOTH 00001 其他用户执行权限
2.read和write函数
函数原型如下:
ssize_t read(int fd, void *buf,size_t count)
ssize_t write(int fd,const void *buf, size_t count)
函数传入参数含义如下:
fd 文件描述符
buf 指定存储器独处数据的缓冲区
count 指定读出或写入的字节数
3.close函数
当使用完文件时可以使用close关闭文件,close会让缓冲区中的数据写回磁盘,并释放文件所占的资源,close的原型如下:
int close(int fd)
函数传入参数:fd文件描述符
函数返回值:若文件顺利关闭则返回0,发生错误则返回-1,并置errno,通常文件在关闭时出错是不常见的,但也不是不可能的情况,他别是在关闭通过网络访问的文件时就会出现这种情况。
4.lseek函数
主要用于移动文件读写指针,主要用于获取文件大小和拓展文件(先分配空间、然后再填充内容),函数原型如下:
off_t lseek(int fd, off_t offset, int whence)
参数 fd:文件描述符。
offset:偏移量,每一读写操作所需要移动的距离,单位是字节的数量,可正可负(向前移,向后移)
whence
(当前位置基点): SEEK_SET:当前位置为文件的开头,新位置为偏移量的大小。
SEEK_CUR:当前位置为文件指针的位置,新位置为当前位置加上偏移量。
SEEK_END:当前位置为文件的结尾,新位置为文件的大小加上偏移量的大小。
返回值 成功:文件的当前位移
-1:出错
实例:(1)参考实验2:linux文件编程;
(2)网盘:/linux编程源代码/IO(readwrite、fcntl)下相关代码
嵌入式知识点复习五 –arm-linux进程编程
一、Linux进程编程
进程(Process)是计算机中的程序关于某数据集合上的一次运行活动,是操作系统进行资源分配和调度的基本单位,是操作系统结构的基础。
1 进程控制
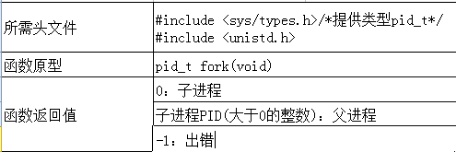
子进程创建:fork()函数
在Linux中创建一个新进程的唯一方法是使用fork()函数。fork()函数是Linux中一个非常重要的函数,和以往遇到的函数有一些区别,因为fork()函数看起来执行一次却返回两个值。
1)fork()函数说明
fork()函数用于从已存在的进程中创建一个新进程。新进程称为子进程,而原进程称为父进程。
使用fork()函数得到的子进程是父进程的一个复制品,它从父进程处继承了整个进程的地址空间,包括进程的上下文、代码段、进程堆栈、内存信息、打开的文件描述符、符号控制设定、进程优先级、进程组号、当前工作目录、根目录、资源限制和控制终端等,而子进程所独有的只有它的进程号、资源使用和计时器等。
因为子进程几乎是父进程的完全复制,所以父子两进程会运行同一个程序。这就需要用一种方式来区分它们,并使它们照此运行,否则,这两个进程不可能做不同的事。
实际上是在父进程中执行fork()函数时,父进程会复制一个子进程,而且父子进程的代码从fork()函数的返回开始分别在两个地址空间中同时运行,从而使两个进程分别获得所属fork()函数的返回值,其中在父进程中的返回值是子进程的进程号,而在子进程中返回0。因此,可以通过返回值来判断该进程的父进程还是子进程。
2)fork()函数语法
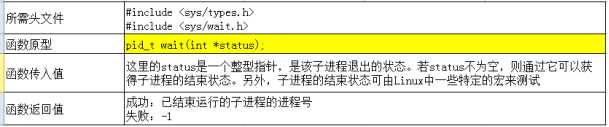
进程等待函数
1)wait()函数,无条件等待,父进程阻塞直到子进程结束
2)waitpid()函数,指定等待某个子进程结束以及等待的方式(阻塞或非阻塞)
所需头文件 #include <sys/types.h>
#include <sys/wait.h>
函数原型 pid_t waitpid(pid_t pid, int *status, int options)
函数参数 pid pid>0:只等待进程ID等于pid的子进程,不管已经有其他子进程运行结束退出了,只要指定的子进程还没有结束,waitpid就会一直等下去。
pid=-1:等待任何一个子进程退出,此时和wait作用一样。
pid=0:等待其组ID等于调用进程的组ID的任一子进程。
pid<-1:等待其组ID等于pid的绝对值的任一子进程。
status 同wait
options WNOHANG:若由pid指定的子进程并不立即可用,则waitpid不阻塞,此时返回值为0
WUNTRACED:若某实现支持作业控制,则由pid指定的任一子进程状态已暂停,且其状态自暂停以来还未报告过,则返回其状态。
0:同wait,阻塞父进程,等待子进程退出。
函数返回值 正常:结束的子进程的进程号
使用选项WNOHANG且没有子进程结束时:0
调用出错:-1
所需头文件 #include <sys/types.h>
#include <sys/wait.h>
函数原型 pid_t waitpid(pid_t pid, int *status, int options)
函数参数 pid pid>0:只等待进程ID等于pid的子进程,不管已经有其他子进程运行结束退出了,只要指定的子进程还没有结束,waitpid就会一直等下去。
pid=-1:等待任何一个子进程退出,此时和wait作用一样。
pid=0:等待其组ID等于调用进程的组ID的任一子进程。
pid<-1:等待其组ID等于pid的绝对值的任一子进程。
status 同wait
options WNOHANG:若由pid指定的子进程并不立即可用,则waitpid不阻塞,此时返回值为0
WUNTRACED:若某实现支持作业控制,则由pid指定的任一子进程状态已暂停,且其状态自暂停以来还未报告过,则返回其状态。
0:同wait,阻塞父进程,等待子进程退出。
函数返回值 正常:结束的子进程的进程号
使用选项WNOHANG且没有子进程结束时:0
调用出错:-1
进程结束:exit()和_exit()
所需头文件 exit:#include <stdlib.h>
_exit:#include <unistd.h>
函数原型 exit:void exit(int status);
_exit:void _exit(int status);
函数传入值 status是一个整型的参数,可以利用这个参数传递进程结束时的状态。
通常0表示正常结束;其他的数值表示出现了错误,进程非正常结束。
在实际编程时,可以用wait系统调用接收子进程的返回值,进行相应的
处理。
所需头文件 exit:#include <stdlib.h>
_exit:#include <unistd.h>
函数原型 exit:void exit(int status);
_exit:void _exit(int status);
函数传入值 status是一个整型的参数,可以利用这个参数传递进程结束时的状态。
通常0表示正常结束;其他的数值表示出现了错误,进程非正常结束。
在实际编程时,可以用wait系统调用接收子进程的返回值,进行相应的
处理。
两者的区别:
(1)_exit()函数的作用最为简单:直接使进程终止运行,清除其使用的内存空间,并销毁其在内核中的各种数据结构;
(2)exit()函数则在这些基础上作了一些包装,在执行退出之前加了若干道工序。
(3)exit()函数在调用exit系统调用之前要检查文件的打开情况,把文件缓冲区中的内容写回文件,就是”清理I/O缓冲”。
Linux下的进程间通信
进程间通信用于实现参数传递及通信功能;Linux支持的常用的进程间通信方法:管道、消息队列、共享内存、信号量、套接口等等。
实例:(1)实验三:Linux进程编程;
(2)网盘linux编程源代码目录下fork文件下相关实例(FIFO、msgque、shm)。
嵌入式知识点复习六 –arm-linux网络编程
1、程序流程
(1)网络通信程序架构-客户端/服务器架构
(2)流程如下图:
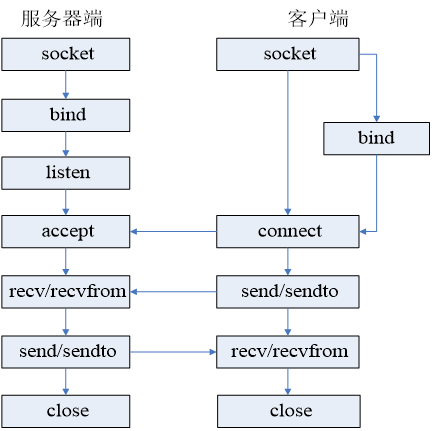
TCP通信
2、函数说明
socket()
Sockfd=socket(AF_INET,SOCK_STREAM,0);
Bind()
s_add.sin_family=AF_INET;IPV4协议
s_add.sin_addr.s_addr=inet_addr(“192.168.1.123”);IP地址192.168.1.123
s_add.sin_port=htons(0x8888);端口号是8888
if(-1 == bind(Sockfd,(struct sockaddr *)(&s_add), sizeof(struct sockaddr)))
listen()服务器端侦听函数
listen(Sockfd,5)服务器侦听来自客户端的请求
accept()服务器端接受客户端连接请求
nfp = accept(Sockfd, (struct sockaddr *)(&c_add), sizeof(struct sockaddr);
send()数据发送函数
send(nfp,“hello,welcome to my server”,32,0)
recv()数据接收函数
recv(nfp,buffer,1024,0)
关闭连接
Close(nfp)
关闭服务器
Close(Sockfd)
实例:(1)实验四:网络聊天室设计
(2)网盘/linux编程源代码/socket下相关代码
嵌入式知识点复习七 –linux字符型设备驱动初步
一、Linux字符设备驱动初步
1、Linux设备类型
(1)字符设备:只能一个字节一个字节的读写的设备,不能随机读取设备内存中的某一数据,读取数据需要按照先后顺序进行。字符设备是面向流的设备,常见的字符设备如鼠标、键盘、串口、控制台、LED等。
(2)块设备:是指可以从设备的任意位置读取一定长度的数据设备。块设备如硬盘、磁盘、U盘和SD卡等存储设备。
(3)网络设备:网络设备比较特殊,不在是对文件进行操作,而是由专门的网络接口来实现。应用程序不能直接访问网络设备驱动程序。在/dev目录下也没有文件来表示网络设备。
2、开发流程
3、关键函数讲解(以2.6以下版本内核为例)
(1)驱动模块注册register_chrdev()函数
原型:register_chrdev(unsigned int major, const char *name,const struct file_operations *fops);
major:主设备号,该值为 0 时,自动运行分配。而实际值不是 0 ;
name:设备名称;
fops:操作函数,实现驱动定义的open、read、write、close等内核函数与应用程序调用的open、read、write、close间的映射;
返回值:
major 值为 0 ,正常注册后,返回分配的主设备号。如果分配失败,返回 EBUSY 的负值 ( -EBUSY ) 。major 值若大于 linux/major.h (2.4内核)中声明的最大值 (#define MAX_CHRDEV 255) ,则返回EINVAL 的负值 (-EINVAL) 。指定 major 值后,若有注册的设备,返回 EBUSY 的负值 (-EBUSY)。若正常注册,则返回 0 值
(2)驱动注销unregister_chrdev()函数
原型:
#include <linux.fs.h>
int unregister_chrdev (unsigned int major, const char *name)
变量:
major 主设备号
name 设备文件
返回值:
major 值若大于 linux/major.h (2.4 内核)中声明的最大值 (#define MAX_CHRDEV 255),返回 EINVAL的负值 (-EINVAL)。指定了 major的值后,若将要注销的 major 值并不是注册的设备驱动程序,返回 EINVAL的负值 ( -EINVAL )。正常注销则返回 0值。
(3)File_operation结构体
file_operations结构是建立驱动程序和设备编号的连接,内部是一组函数指针,每个打开的文件,也就是file结构,和一组函数关联,这些操作主要用来实现系统调用的
struct file_operations {
struct module *owner;//拥有该结构的模块的指针,一般为THIS_MODULES
loff_t (*llseek) (struct file *, loff_t, int);//用来修改文件当前的读写位置
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);//从设备中同步读取数据
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);//向设备发送数据
ssize_t (*aio_read) (struct kiocb *, const struct iovec *, unsigned long, loff_t);//初始化一个异步的读取操作
ssize_t (*aio_write) (struct kiocb *, const struct iovec *, unsigned long, loff_t);//初始化一个异步的写入操作
int (*readdir) (struct file *, void *, filldir_t);//仅用于读取目录,对于设备文件,该字段为NULL
unsigned int (*poll) (struct file *, struct poll_table_struct *); //轮询函数,判断目前是否可以进行非阻塞的读写或写入
int (*ioctl) (struct inode *, struct file *, unsigned int, unsigned long); //执行设备I/O控制命令
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long); //不使用BLK文件系统,将使用此种函数指针代替ioctl
long (*compat_ioctl) (struct file *, unsigned int, unsigned long); //在64位系统上,32位的ioctl调用将使用此函数指针代替
int (*mmap) (struct file *, struct vm_area_struct *); //用于请求将设备内存映射到进程地址空间
int (*open) (struct inode *, struct file *); //打开
int (*flush) (struct file *, fl_owner_t id);
int (*release) (struct inode *, struct file *); //关闭
int (*fsync) (struct file *, struct dentry *, int datasync); //刷新待处理的数据
int (*aio_fsync) (struct kiocb *, int datasync); //异步刷新待处理的数据
int (*fasync) (int, struct file *, int); //通知设备FASYNC标志发生变化
int (*lock) (struct file *, int, struct file_lock *);
ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long);
int (*check_flags)(int);
int (*flock) (struct file *, int, struct file_lock *);
ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int);
ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int);
int (*setlease)(struct file *, long, struct file_lock **);
};
实例:见网盘/linux编程源代码/ok6410ledrv
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/132741.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
