大家好,又见面了,我是你们的朋友全栈君。
现象与原因
最近用arduino单片机,机械臂一直在不停的抖动。
通过硬件解决
原文链接:https://blog.csdn.net/zenghuanyu_big/article/details/78515309
首先,需要知道舵机的使用方法,简单来说,就是给一定时间的高电平,舵机能转动在一定的角度。其实,你只需给舵机一次能转动在一定角度的高低电平,之后只需保持上电状态,理论上舵机能保持不动。但这样极易出现波动干扰,所以此时需要一个74HC595芯片。
74HC595具有8位移位寄存器和一个存储器,三态输出功能。 移位寄存器和存储器有相互独立的时钟。简单来说,它可以保存单片机给的周期信号,使舵机不易受到干扰。
之所以出现了这个问题,就是因为arduino语言都是写好的库函数,没有了解底层的应用,导致IO口共用,出现机械臂抖动的问题。所以大家以后还是尽量了解底层的一些东西,可以减少犯错。
通过软件解决
原文链接:https://blog.csdn.net/wzxxtt62267018/article/details/79785690
此方法毕竟有延时,还是建议通过硬件解决。
这几天练习用Arduino通过Servo库控制舵机转动,在中loop中先有几秒让舵机停在0度,然后转到另外一个角度,就在这等待的几秒钟内,舵机不淡定了,不规则地抖动,等到让它转到指定角度时,它也能转过去。我推测这一定是控制程序的问题。在网上查找资料,发现下面的一段话说的靠谱:
在Arduino中,servo是一个库,可以简单的操作舵机。但从servo库的底层代码上来看,它使用了定时器中断,如果你调用了servo库,同时还使用串口通信的功能,那么,恭喜你,对于部分Arduino的板卡来说,一定会抖动。原因很简单,因为串口通信和servo都要使用定时器,所以就不正常了。
就像我一直在教学Arduino的过程中所强调的那样,库是别人写好你来用的,核心的东西你不知道,没准什么时候就有问题就冲突了,要想学好学精,还是要自己通过代码来实现各种功能,不仅性能好,而且还锻炼了你自己的综合能力。
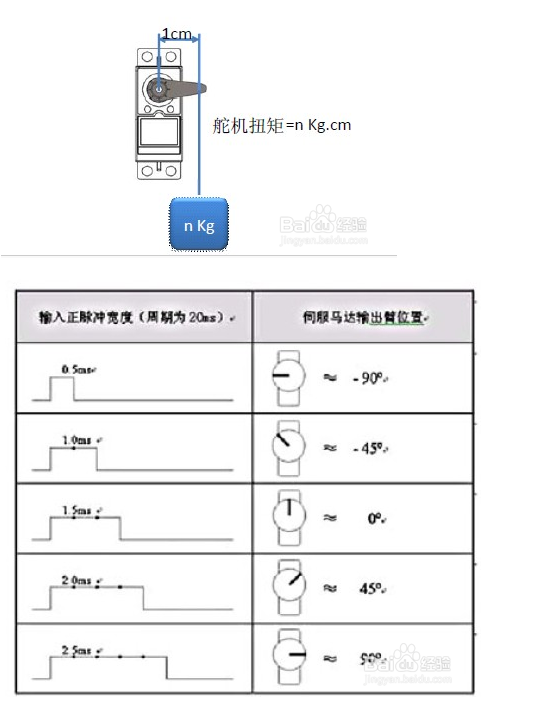
提示你一点关于舵机的知识。驱动舵机,需要产生PWM信号,普通模拟舵机能识别50HZ的PWM信号,其中每个信号周期内,高电平的持续时间代表舵机的驱动角度。500uS为最小舵量,1500为中立舵量,2500为最大舵量,你可以使用micros()这个函数来精确控制高电平的持续时间。
使用Servo.h库方便,但是为什么会跟pwm冲突呢,因为在Arduino里的库封装里,它们都是用了同一个定时器1,T/C1: Pin9(OC1A)和Pin10(OC1B),所以会导致冲突,如何解决呢,可以在硬件上修改引脚。不费事的办法就是通过修改代码来解决冲突。我们可以换一种方法来实现舵机的控制:
既然这样,那就重写一段好了:
int servopin = 7; //定义舵机接口数字接口7 也就是舵机的橙色信号线。
void servopulse(int angle)//定义一个脉冲函数
{
//发送50个脉冲
for (int i = 0; i < 50; i++) {
int pulsewidth = (angle * 11) + 500; //将角度转化为500-2480的脉宽值
digitalWrite(servoPin, HIGH); //将舵机接口电平至高
delayMicroseconds(pulsewidth); //延时脉宽值的微秒数
digitalWrite(servoPin, LOW); //将舵机接口电平至低
delayMicroseconds(20000 - pulsewidth);
}
// delay(20);
}
void setup()
{
pinMode(servopin, OUTPUT); //设定舵机接口为输出接口
}
void loop()
{
//把值的范围映射到0到165左右
for ( int angle = 0; angle < 180; angle += 10) {
servopulse(angle); //引用脉冲函数
delay(1000);
}
}
直接通过延时函数来给舵机脉冲,达到控制的效果,因为Arduino里延时函数delay()用的是定时器0,所以就不会冲突了。
关于舵机的扭矩和角度周期示意图如下:
74HC595 芯片原理和 Arduino 使用实例
原文地址:http://arduino.nxez.com/2016/12/20/74hc595-chip-principle-and-arduino-use-example.html
74HC595 简单说来就是具有8位移位寄存器和一个存储器,以及三态输出功能。 这里我们用它来控制8个LED小灯。我们为什么要用74HC595来控制小灯呢?一定会有很多朋友会问这个问题,我想问的是我们要是单纯的用Arduino控制8个小灯的话要占用多少个I/O呢?答案是8个,但是我们的Arduino 168有几个I/O口呢?加上模拟接口也就20个吧,这8个小灯占用了太多的资源了,我们用74HC595的目的就是减少I/O口的使用数量。用74HC595以后我们可以用3个数字I/O口控制8个LED小灯岂不美哉。
原理说明
先转一段百度百科上74HC595芯片的简介。
74HC595具有8位移位寄存器和一个存储器,三态输出功能。 移位寄存器和存储器有相互独立的时钟。数据在SH_cp(移位寄存器时钟输入)的上升沿输入到移位寄存器中,在ST_cp(存储器时钟输入)的上升沿输入到存储寄存器中去。如果两个时钟连在一起,则移位寄存器总是比存储寄存器早一个脉冲。移位寄存器有一个串行移位输入(Ds),和一个串行输出(Q7’),和一个异步的低电平复位,存储寄存器有一个并行8位的,具备三态的总线输出,当使能OE时(为低电平),存储寄存器的数据输出到总线。
看不懂吧,没关系,我们先看一下芯片的引脚图:
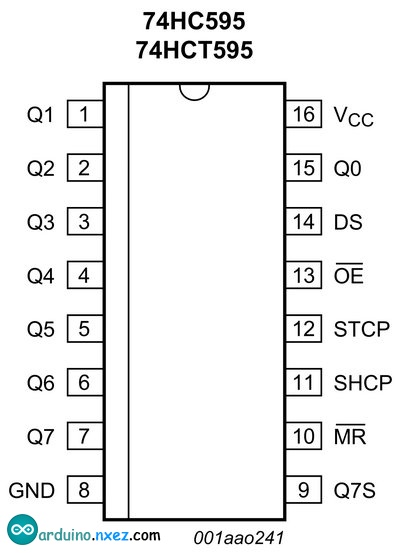
分别解释一下:
- GND接地,VCC接5V电源,这个就不用说了。
- Q0-Q7这8根引脚是芯片的输出引脚,直接跟数码管的8段引脚相连。对应关系要看你怎么接线和写代码时传送数据的顺序了。
- DS是串行输入引脚,所谓串行就是使数据在一根信号线上按顺序一位一位地传输,就像一串糖葫芦。这个引脚我们接到树莓派任意一个GPIO口上(输出模式)。
- SHCP是移位寄存器的时钟引脚。听上去有点复杂,其实很简单。74HC595内部有一个8位的移位寄存器用来保存从DS引脚输入的数据。那么74HC595怎么知道什么时候该从DS引脚上取数据了呢?正是通过SHCP这个时钟引脚来实现的。只有在SHCP发生一次上升沿的时候,74HC595才会从DS引脚上取得当前的数据(高/低电平)并把取到的这一位数据保存到移位寄存器里。同样的,这个引脚也接到树莓派任意一个GPIO口上。当我们向芯片发送数据时,要先在DS引脚上准备好要传送的数据,然后制造一次SHCP引脚的上升沿(先拉低电平再拉高电平),74HC595会在这个上升沿将DS引脚上的数据存入移位寄存器D0,同时D0原来的数据会顺移到D1,D1的数据位移到D2。。。D6的数据位移到D7。而原先D7的数据已经没有地方储存了,这一位数据会被输出到引脚Q7S上。这个引脚的作用我们下一篇再说,本文暂时用不到这个引脚。(注意这里说的不是输出引脚Q0-Q7,而是指内部的8位移位寄存器里每一个“小房间”,芯片手册上并没有给这些小房间编号,这里为了说明方便进行了编号)
- STCP是芯片内部另外一个8位锁存寄存器的时钟引脚。当移位寄存器的8位数据全部传输完毕后,制造一次锁存器时钟引脚的上升沿(先拉低电平再拉高电平)。74HC595会在这个上升沿将移位寄存器里的8位数据复制到锁存器中(锁存器里原来的数据将被替换)。注意,到这里为止,这8位数据还只是被保存在锁存器里,并没有输出到数码管上。这个引脚同样连接到树莓派任意一个GPIO口上即可。
- OE是输出使能引脚,在其他芯片里也很常见。作用是控制锁存器里的数据是否最终输出到Q0-Q7输出引脚上。低电平时输出,高电平时不输出(既不是高电平,也不是低电平而是高阻态,不通电)。本例为了方便直接接在GND上使其一直保持低电平输出数据。
- MR是用来重置内部寄存器的引脚。低电平时重置内部寄存器(MemoryReset?)。本例为了方便直接连接在Vcc上一直保持高电平。
- Q7S引脚,串行输出引脚,本文不使用,下一篇再解释它的作用。
锁存器
关于锁存器。顾名思义就是将数据保存并锁定。一旦进入了锁存器,除非断电或重置数据(MR口设置为低电平),锁存器的数据不会再改变。好处是,当你需要更新数据时,将数据串行输入移位寄存器的过程中,锁存器里的数据不会有任何影响,也就不会有闪烁了。一直到移位寄存器8位数据准备完毕,再制造一次STCP的上升沿一次性更新锁存器的数据,更新输出。
另外,我做了一个动画帮助你理解整个过程。

arduino示例
下面是我们要准备的元器件。
74HC595 直插芯片1、红色M5 直插LED4、绿色M5 直插LED4、220Ω直插电阻8、面包板1、面包板跳线1 扎。
准备好元件我们就按下面的原理图连接电路。
此电路图看似复杂,我们仔细分析以后再结合参考实物就会发现很简单。
下面是参考源程序:
int latchPin = 5;
int clockPin = 4;
int dataPin = 2; //这里定义了那三个脚
void setup ()
{
pinMode(latchPin, OUTPUT);
pinMode(clockPin, OUTPUT);
pinMode(dataPin, OUTPUT); //让三个脚都是输出状态
}
void loop()
{
for (int a = 0; a < 256; a++) //这个循环的意思是让a这个变量+1一直加到到256,每次循环都进行下面的活动
{
digitalWrite(latchPin, LOW); //将ST_CP口上面加低电平让芯片准备好接收数据
shiftOut(dataPin, clockPin, MSBFIRST, a);
//这个就是用MSBFIRST参数让0-7个针脚以高电平输出(LSBFIRST 低电平)是dataPin的参数,
//clockPin的参数是变量a,前面我们说了这个变量会一次从1+1+到256,是个十进制数,
// 输入到芯片后会产生8个二进制数,达到开关的作用
digitalWrite(latchPin, HIGH); //将ST_CP这个针脚恢复到高电平
delay(1000); //暂停1秒钟让你看到效果
}
}
下载完程序大家就可以看到8 个小灯闪烁的美妙场景了。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/132154.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...