大家好,又见面了,我是你们的朋友全栈君。
引言
逆变电源一般采用瞬时反馈控制技术来提高逆变电源的动态响应速度,减少输出电压的谐波含量,改善输出电压波形的质量。常见的逆变电源控制技术,有重复控制、谐波补偿控制、无差拍控制、电压瞬时值控制和带电流内环的电压瞬时值控制等类型[1~4]。其中,带电流内环电压瞬时值环路的双环控制方法因实现简单,系统动态性能优越和对负载的适应性强等优点,而逐渐成为高性能逆变电源的发展方向之一[4]。但传统控制方法是基于逆变电源直流侧输入电压为无脉动直流电压的假定,而实际逆变电源,存在因电网电压波动或负载突变而导致直流侧电压波动的现象[5]。直流输入电压波动会引起逆变器开环增益波动,进而影响输出电压质量。文献[6]提出在传统双环控制的基础上,增加输出电压有效值反馈环的三环控制策略,在一定程度上消除了直流输入电压波动导致的输出电压稳态误差,但有效值环对输出电压变化的响应速度较慢,控制过程复杂。
此外,正弦脉宽调制逆变电源开关管工作在硬开关状态下,将产生大量的高次谐波,使变换器及负载的损耗加大,设备使用寿命降低,甚至可能引发并联或串联谐振,损坏电气设备以及干扰通信线路的正常工作[7]。软开关技术是克服以上缺陷的有效方法之一[8]。采用HPWM[9]调制可实现ZVS软开关技术,在不增加硬件和改变变换器拓扑的前提下,可利用现有元器件和开关管的寄生参数,创造逆变桥开关管ZVS软开关条件,从而最大限度地实现ZVS。
本文针对直流侧电压扰动时双环控制逆变电源的输出电压波形发生畸变、幅值发生变化的现象,提出了通过输入电压前馈控制环来修正基准正弦信号的幅值,从而改善逆变电源输出电压质量的三环控制方法。同时,借助于DSP强大的运算能力和丰富的外设,实现HPWM逆变电源的数字控制,从而简化了硬件电路。仿真结果表明,本文所提出的控制策略简单实用,可有效地提高逆变电源在直流输入电压扰动下的动态性能和稳态精度,并降低了输出电压的总谐波。
2 逆变电源系统建模
单相全桥逆变电源的主电路结构如图1所示,直流输入电压Ud经逆变桥后得到脉冲输出电压Ui,再经LC滤波后得到正弦输出电压Uo。

由逆变桥平均值模型可知:当三角载波频率fc远高于输出正弦波基频f时,逆变桥输出电压Ui在一个载波周期Tc的平均值 ,可近似看成输出电压基波分量的瞬时值Ui1,即

式中:Ud为直流输入电压;UCm为三角载波幅值。令kPWM=Ud/UCm表示正弦调制信号经过逆变桥的增益,因Ud变化而引起的kPWM变化定义为干扰变量。基于电压瞬时值外环和电容电流内环的双环控制系统如图2所示[7]。电压瞬时值外环采用PI调节,电容电流内环采用P调节。开关频率为20kHz,根据转折频率ωn1=ωc/10、阻尼系数ξ=0.3,可得输出滤波器参数[3]为:L=670μH、C=47μF。控制器的仿真参数为:Kv=0.0015,Ki=0.05,kvp=0.098,kvi=350,kip=20。
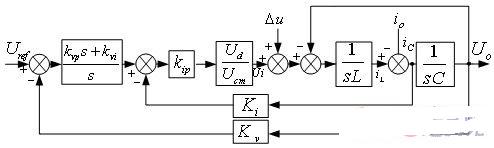
图2 逆变电源双环控制框图
考虑逆变电源对输入电压扰动的瞬态响应性能,令Uref=0,io=Uo/R,则可得出输出电压Uo对直流电压扰动Δu的传递函数:

由式(2)可知,系统对直流输入电压阶跃响应的调节时间Ts为5ms。因此,当逆变电源输出电压频率为400Hz时,系统的调节时间持续两个正弦周期,但因响应峰值较小,对输出电压波形不会造成明显影响。而当逆变电源输出电压频率为50Hz时,响应峰值集中出现在1/4正弦周期内,使输出电压波形出现失真。
3 直流电压前馈控制原理
由以上分析可知,双环反馈控制逆变器,对直流输入电压变化的调节有一定的滞后性和稳态误差。为此,本文提出用输入电压前馈环实时检测直流输入电压,对逆变桥增益kPWM进行补偿,抵消直流输入电压Ud波动对逆变电源的影响。因此,在传统双环控制系统中,额定直流输入电压U*d除以采样得到的直流输入电压Ud,再与经双环校正的正弦信号ugm相乘后得到调制信号u′gm,将其送入PWM发生器,如图3所示。

图3 逆变电源直流电压前馈控制原理图
将调制信号ugm(t)=U′gmsinωt代入(1)式中可得:

其中:m′=U′gm/UCm即为补偿后的调制比。为了保证直流电压的利用率,系统需要保持很高的调制度,即m接近于1,也即Ugm接近于UCm。
4 HPWM调制原理
混合式脉宽调制方式(HPWM)实质为单极性SPWM调制方式,其工作时每半个输出电压周期切换,即同一个桥臂的开关管,在前半个工频周期内工作在低频,而后半个工频周期内工作在高频,从而克服传统单极性控制方式下,总是一个桥臂工作的开关管同时工作在高频状态的缺陷,提高了开关管的使用寿命和系统可靠性。
逆变电源工作在HPWM软开关方式下的输出电压,在一个开关周期内有12种工作状态。基于输出电压正负半周工作状态的对称性,以输出电压正半周期为例,分析单相全桥逆变电源一个开关周期内的6种工作模态,如图4所示。
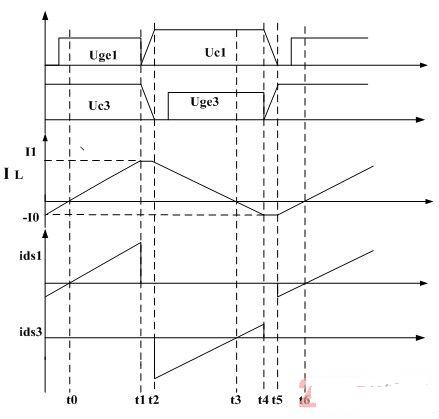
图4 HPWM逆变电源工作模态图
从t0到t1时刻逆变电源工作在模式A状态下。开关管S1和S4导通,电路为正电压输出模式,滤波电感电流线性增加,直到t1时刻S1关断为止。
从t1到t2时刻逆变电源工作在模式B状态下。在t1时刻,S1关断,滤波电感电流从S1中转移到C1和C3支路,给C1充电的同时给C3放电。由于C1、C3的存在,S1工作在零电压关断状态下。由于该状态持续时间很短,可以认为滤波电感电流近似不变,等效为恒流源,则C1两端电压线性上升,C3两端电压线性下降。到t2时刻,C3电压下降到零,S3的体二极管D3自然导通,电路模式B工作结束。
从t2到t3时刻逆变电源工作在模式C状态下。 D3导通后开通S3,所以S3为零电压开通。此时电流由D3向S3转移,S3工作于同步整流状态。电流由S3流过,使电路处于零态续流状态,电感电流线性减小,直到t3时刻减小到零。在此期间,要保证S3实现ZVS,则S1关断和S3开通之间需要死区时间tdead1,并且满足以下要求:

从t3到t4时刻逆变电源工作在模式D状态下。在此模式下滤波电感Lf两端电压为-U0,电感电流开始由零向负方向增加,电路处于零态储能状态,S3中的电流也相应由零正向增加,到t4时刻S3关断,结束D模式。
从t4到t5时刻逆变电源工作在模式E状态下。此模式状态与模式A近似,S3关断,C3充电C1放电,同理S3为零电压关断。t5时刻,C1的电压降到零,二极管D1自然导通,进入下一电路模式F,
从t5到t6时刻,在D1导通后,开通S1,则S1为零电压开通。电流由D1向S1转移,S1工作于同步整流状态,电路处于正电压输出状态回馈模式,电感电流负向减小,直到减小到零。之后,输入电压正向输出给电感储能,回到初始模式A,开始下一开关周期。同理,要保证S1零电压开通,则S3关断和S1开通之间需要死区时间tdead2,同时满足:tdead2>2CeffUd/I0,需要注意的是一般有I1>I0,因此得出tdead2>tdead1。
5 仿真实验结果分析
利用Matlab/Simulink对本文设计的逆变电源电路进行了仿真验证,并采用上述原理,研制了实验样机以验证方案可行性。参数如下:直流输入电压Ud为400V±20%,额定输出电压Uo幅值为310V,输出功率1kVA,三角调制波频率为10kHz,幅值为1V,调制比0.8,THD 。
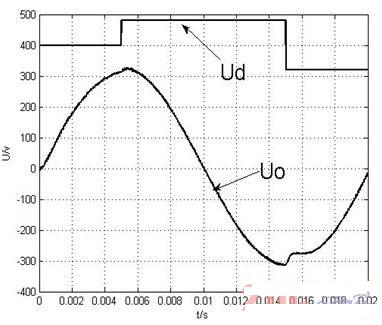
图10为当输出50Hz交流时,Ud波动的情况下,传统双环控制逆变电源和本文研究的逆变电源的输出电压波形。由图10可以看出,传统双环控制,因控制器调节较慢而导致输出电压波形失真,而本文研究的逆变电源输出电压波形保持良好,明显提高了系统对直流输入电压扰动的瞬态响应性能。
(a)

(b)
图5 直流电压波动后的输出电压波形:(a) 传统双环控制;(b) 前馈电压控制
实验测得开关管1和开关管4的驱动波形如图6所示。由图可以看出,开关管工作在HPWM调制方式下。
阻性半载下输出电压波形如图7所示,阻性满载下输出电压波形如图8所示。由图7和图8可以看出,负
载从半载到满载变化时,输出电压的失真度较小,输出电压的幅值变化不大,系统具有良好的稳压输出。
图7 阻性半载下输出电压波形
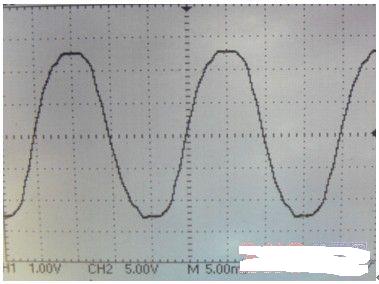
图8 阻性满载下输出电压波形
6 结论
在深入分析传统双环控制逆变电源对直流输入电压扰动响应性能的基础上,提出了利用输入电压前馈控制环来消除直流输入电压波动对逆变电源性能的影响。本文利用DSP芯片的强大功能,实现了数字式HPWM逆变电源的设计,采用HPWM的控制方式以不对称规则采样法,有效地抑制了系统的谐波分量;同时4个开关管分别实现了软开关控制,降低了开关损耗,提高了电路效率。仿真实验结果证明,加输入电压前馈补偿环的逆变电源对直流输入电压扰动有很好的静态和动态性能。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/131937.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...

