大家好,又见面了,我是你们的朋友全栈君。
一、MIPI
MIPI(移动行业处理器接口)是Mobile Industry Processor Interface的缩写。MIPI(移动行业处理器接口)是MIPI联盟发起的为移动应用处理器制定的开放标准。
已经完成和正在计划中的规范如下:

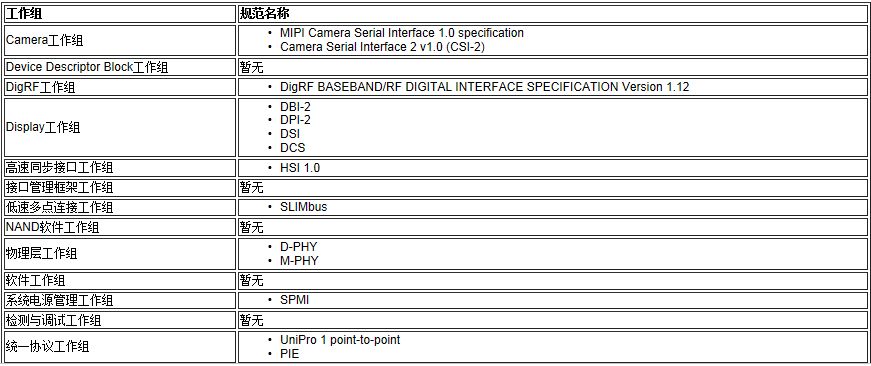
二、MIPI联盟的MIPI DSI规范
1、名词解释
• DCS (DisplayCommandSet):DCS是一个标准化的命令集,用于命令模式的显示模组。
• DSI, CSI (DisplaySerialInterface, CameraSerialInterface
• DSI 定义了一个位于处理器和显示模组之间的高速串行接口。
• CSI 定义了一个位于处理器和摄像模组之间的高速串行接口。
• D-PHY:提供DSI和CSI的物理层定义
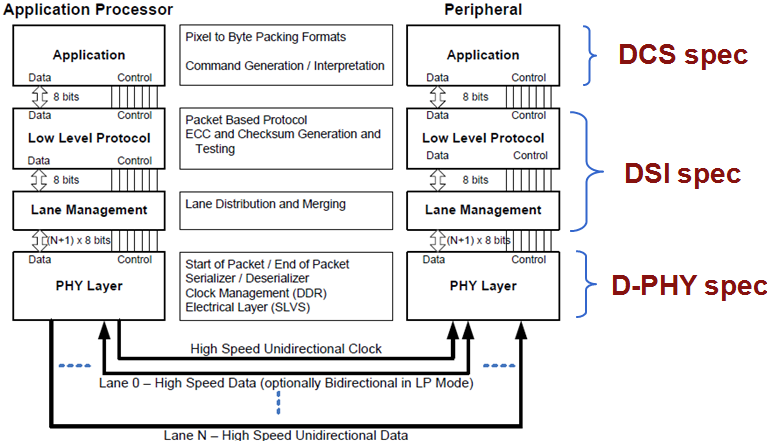
2、DSI分层结构
DSI分四层,对应D-PHY、DSI、DCS规范、分层结构图如下:
• PHY 定义了传输媒介,输入/输出电路和和时钟和信号机制。
• Lane Management层:发送和收集数据流到每条lane。
• Low Level Protocol层:定义了如何组帧和解析以及错误检测等。
• Application层:描述高层编码和解析数据流。
3、Command和Video模式
• DSI兼容的外设支持Command或Video操作模式,用哪个模式由外设的构架决定
• Command模式是指采用发送命令和数据到具有显示缓存的控制器。主机通过命令间接的控制外设。Command模式采用双向接口
• Video模式是指从主机传输到外设采用时实象素流。这种模式只能以高速传输。为减少复杂性和节约成本,只采用Video模式的系统可能只有一个单向数据路径
三、D-PHY介绍
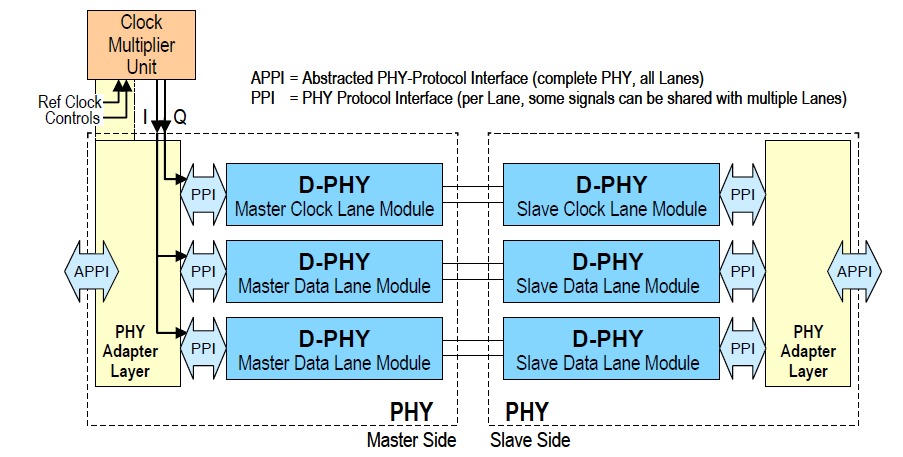
1、 D-PHY 描述了一同步、高速、低功耗、低代价的PHY。
• 一个 PHY配置包括
• 一个时钟lane
• 一个或多个数据lane
• 两个Lane的 PHY配置如下图
• 三个主要的lane的类型
• 单向时钟Lane
• 单向数据Lane
• 双向数据Lane
• D-PHY的传输模式
• 低功耗(Low-Power)信号模式(用于控制):10MHz (max)
• 高速(High-Speed)信号模式(用于高速数据传输):80Mbps ~ 1Gbps/Lane
• D-PHY低层协议规定最小数据单位是一个字节
• 发送数据时必须低位在前,高位在后.
• D-PHY适用于移动应用
• DSI:显示串行接口
• 一个时钟lane,一个或多个数据lane
• CSI:摄像串行接口
2、Lane模块
• PHY由D-PHY(Lane模块)组成
• D-PHY可能包含:
• 低功耗发送器(LP-TX)
• 低功耗接收器(LP-RX)
• 高速发送器(HS-TX)
• 高速接收器(HS-RX)
• 低功耗竞争检测器(LP-CD)
• 三个主要lane类型
• 单向时钟Lane
• Master:HS-TX, LP-TX
• Slave:HS-RX, LP-RX
• 单向数据Lane
• Master:HS-TX, LP-TX
• Slave:HS-RX, LP-RX
• 双向数据Lane
• Master, Slave:HS-TX, LP-TX, HS-RX, LP-RX, LP-CD
3、Lane状态和电压
• Lane状态
• LP-00, LP-01, LP-10, LP-11 (单端)
• HS-0, HS-1 (差分)
• Lane电压(典型)
• LP:0-1.2V
• HS:100-300mV (200mV)
4、操作模式
• 数据Lane的三种操作模式
• Escape mode, High-Speed(Burst) mode, Control mode
•从控制模式的停止状态开始的可能事件有:
• Escape mode request (LP-11→LP-10→LP-00→LP-01→LP-00)
• High-Speed mode request (LP-11→LP-01→LP-00)
• Turnaround request (LP-11→LP-10→LP-00→LP-10→LP-00)
• Escape mode是数据Lane在LP状态下的一种特殊操作
•在这种模式下,可以进入一些额外的功能:LPDT, ULPS, Trigger
•数据Lane进入Escape mode模式通过LP-11→LP-10→LP-00→LP-01→LP-00
•一旦进入Escape mode模式,发送端必须发送1个8-bit的命令来响应请求的动作
• Escape mode 使用Spaced-One-Hot Encoding
•超低功耗状态(Ultra-Low Power State)
•这个状态下,lines处于空状态 (LP-00)
• 时钟Lane的超低功耗状态
•时钟Lane通过LP-11→LP-10→LP-00进入ULPS状态
•通过LP-10 → TWAKEUP →LP-11退出这种状态,最小TWAKEUP时间为1ms
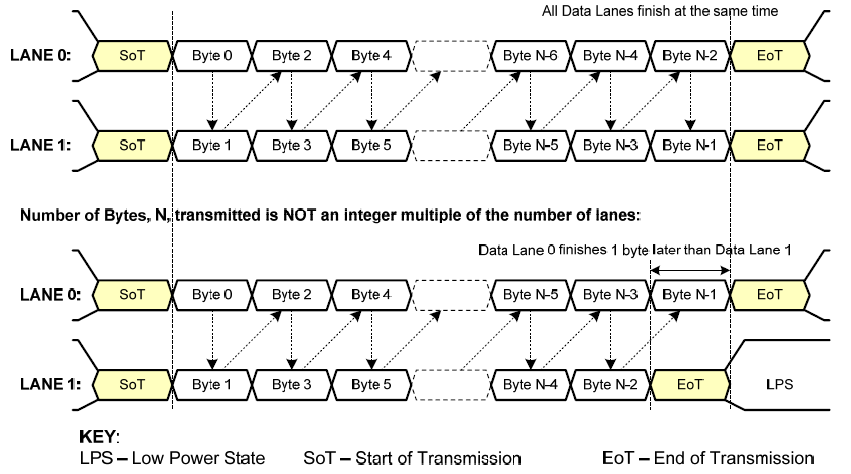
• 高速数据传输
•发送高速串行数据的行为称为高速数据传输或触发(burst)
•全部Lanes门同步开始,结束的时间可能不同。
•时钟应该处于高速模式
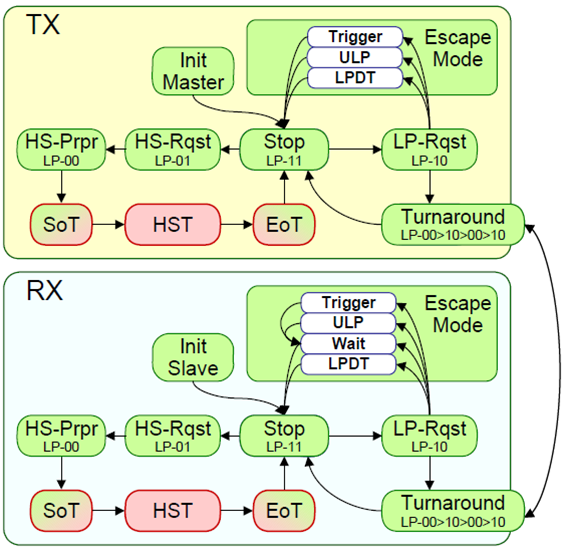
• 各模操作式下的传输过程
•进入Escape模式的过程 :LP-11→LP-10→LP-00→LP-01→LP-00→Entry Code → LPD (10MHz)
•退出Escape模式的过程:LP-10→LP-11
•进入高速模式的过程:LP-11→LP-01→LP-00→SoT(00011101) → HSD (80Mbps ~ 1Gbps)
•退出高速模式的过程:EoT→LP-11
•控制模式 – BTA 传输过程:LP-11→LP-10→LP-00→LP-10→LP-00
•控制模式 – BTA 接收过程:LP-00→LP-10→LP-11
• 状态转换关系图
四、DSI介绍
1、DSI是一种Lane可扩展的接口,1个时钟Lane/1-4个数据Lane
• DSI兼容的外设支持1个或2个基本的操作模式:
• Command Mode(类似于MPU接口)
• Video Mode(类似于RGB接口)- 必须用高速模式传输数据,支持3种格式的数据传输
• Non-Burst 同步脉冲模式
• Non-Burst 同步事件模式
• Burst模式
• 传输模式:
• 高速信号模式(High-Speed signaling mode)
• 低功耗信号模式(Low-Power signaling mode) – 只使用数据lane 0(时钟是由DP,DN异或而来)。
• 帧类型
• 短帧:4 bytes (固定)
• 长帧:6~65541 bytes (可变)
• 两个数据Lane高速传输示例
2、短帧结构
• 帧头部(4个字节)
• 数据标识(DI) 1个字节
• 帧数据- 2个字节 (长度固定为2个字节)
• 错误检测(ECC) 1个字节
• 帧大小
• 长度固定为4个字节
3、长帧结构
• 帧头部(4个字节)
• 数据标识(DI) 1个字节
• 数据计数- 2个字节 (数据填充的个数)
• 错误检测(ECC) 1个字节
•数据填充(0~65535 字节)
• 长度=WC*字节
• 帧尾:校验和(2个字节)
• 帧大小:
• 4 + (0~65535) + 2 = 6 ~ 65541 字节
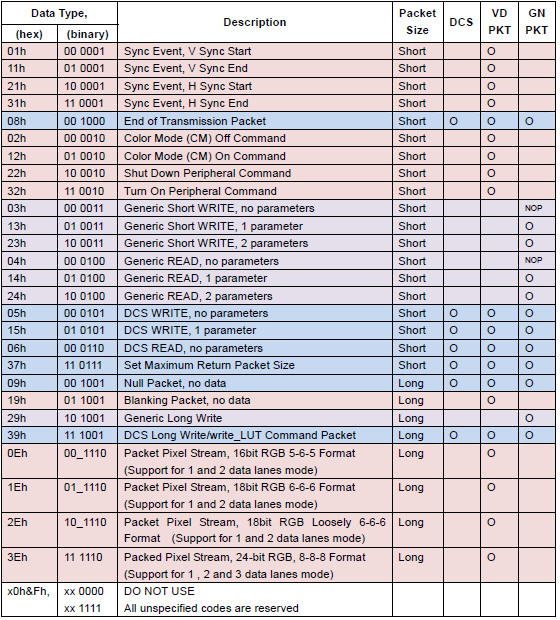
4、帧数据类型
五、MIPI DSI信号测量实例
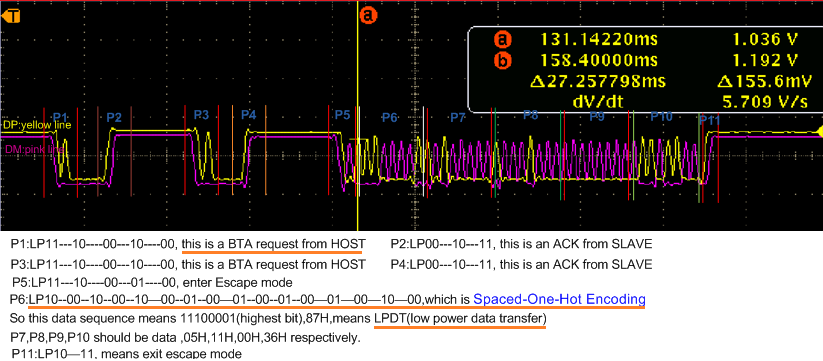
1、MIPI DSI在Low Power模式下的信号测量图
2、MIPI的D-PHY和DSI的传输方式和操作模式
• D-PHY和DSI的传输模式
• 低功耗(Low-Power)信号模式(用于控制):10MHz (max)
• 高速(High-Speed)信号模式(用于高速数据传输):80Mbps ~ 1Gbps/Lane
• D-PHY的操作模式
• Escape mode, High-Speed(Burst) mode, Control mode
• DSI的操作模式
• Command Mode(类似于MPU接口)
• Video Mode(类似于RGB接口)- 必须用高速模式传输数据
3、小结论
• 传输模式和操作模式是不同的概念
• Video Mode操作模式下必须使用High-Speed的传输模式
• Command Mode操作模式并没有规定使用High-Speed或Low Power的传输模式,或者说
• 即使外部LCD模组为Video Mode,但通常在LCD模组初始化时还是使用Command Mode模式来读写寄存器,因为在低速下数据不容易出错并且容易测量。
• Video Mode只用High-Speed的方式来发送数据,Command Mode操作模式也可以使用High-Speed,只是没有必要这么做。
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/131471.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
