大家好,又见面了,我是你们的朋友全栈君。
本文是对ARM处理器架构的学习,针对S3C2440型号。参考了Samsung官方的技术文档S3C2440.pdf中的PROGRAMMER’S MODEL一节的内容。
ARM和THUMB指令模式
S3C2440采用了armv4t指令集,同时支持arm指令集和thumb指令集。arm指令是32位的,而thumb指令是16位的。之所以存在thumb指令是为了降低代码的存储空间。
两个指令集之间的切换
-
手动切换
因为不管是arm指令集还是thumb指令集,代码地址的最低位都是多余的,因为thumb是16位对齐的,arm是32位对齐的。所以最后一位可以用来作为切换的参考。当执行BX指令时,若地址的最后一位置位,则接下来的指令使用thumb指令集来解释,跳转时,最后一位清零,则使用arm指令集。 -
自动切换
在特权模式下只能使用arm指令集,所以当在用户模式下执行thumb指令时,若跳转到特权模式时,将会自动切换到arm指令模式。当从特权模式切换回用户模式时,如果进入之前是thumb指令集,那么就是自动切换回thumb指令集。
数据存储格式
S3C2440同时支持大小端数据存储格式,默认情况下采用小端格式储存。
-
大端储存
高字节存储在低地址中,低字节存储在高地址中。 -
小端存储
高字节存储在高地址中,低字节存储在低地址中。
操作模式
ARM920T支持七种操作模式:
-
用户模式
-
快中断模式
-
中断模式
-
管理者模式
-
中止模式
-
系统模式
-
未定义模式
模式转换可以通过软件的形式,也可以自动进行切换,比如产生了中断。除了用户模式,其它模式都是特权模式,有些资源只能在特权模式下使用。
寄存器
ARM920T总共有37个寄存器,同一时间不是所以的寄存器都是可见的。
ARM模式下的寄存器

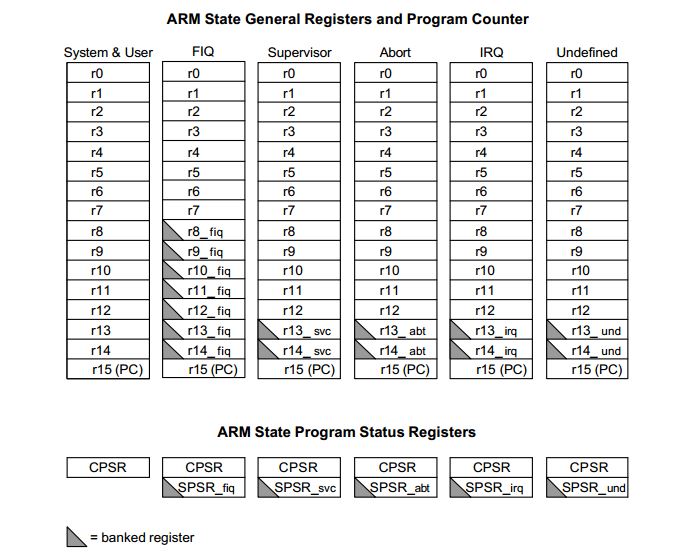
thumb模式下的寄存器
在thumb模式下,不是所有的寄存器都是被使用的,R8-R12寄存器没有被使用。

虽然thumb模式下按规定R8-R12寄存器不能被使用,但是编译器能够使用这些寄存器作为快速存储。
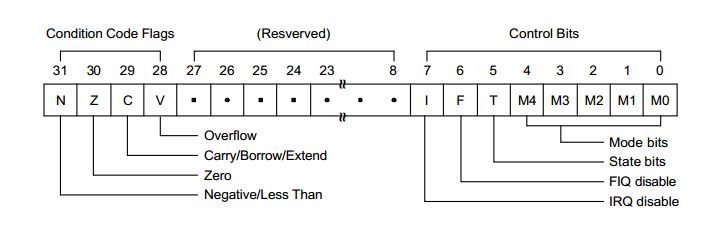
状态寄存器
CPSR和SPSR是ARM920T中的两个状态寄存器,SPSR是用来临时保存CPSR寄存器的值的。
状态寄存器的作用
-
保存最近ALU计算信息
-
控制中断的开启和关闭
-
设置处理器的模式
异常处理
在ARM中,所有打断程序正常执行的事件都称为异常,中断也是属于异常。在进入异常的时候,硬件会自动执行如下的操作;但是当退出异常时,下列的操作是由我们自己编写软件实现的。
进入异常
1.保留下一个指令地址到合适的LR寄存器(哪种异常发生就将其保存在该模式下的LR寄存器中)。
2.复制CPSR到合适的SPSR中(哪种异常发生就将其保存在该模式下的SPSR寄存器中)。
3.设置CPSR中的模式位
4.PC从相应中断向量表中获取地址
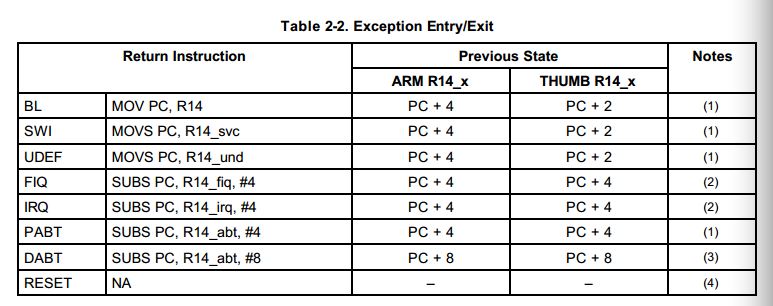
退出异常
1.将LR中的值减去一个偏移量赋给PC
2.将SPSR的值拷贝到CPSR中
3.如果在进入时设置了中断禁止标志,清除禁止标志
举例说明:
HandleIRQ:
sub lr, lr, #4 @ 计算返回地址
stmdb sp!, { r0-r12,lr } @ 保存使用到的寄存器
@ 注意,此时的sp是中断模式的sp
@ 初始值是上面设置的3072
ldr lr, =int_return @ 设置调用ISR即EINT_Handle函数后的返回地址
ldr pc, =EINT_Handle @ 调用中断服务函数,在interrupt.c中
int_return:
ldmia sp!, { r0-r12,pc }^ @ 中断返回, ^表示将spsr的值复制到cpsr在中断处理函数EINT_Handle中需要将中断挂起位给清除掉。
下表是在退出各种异常时需要执行的返回函数:
中断向量表地址
下表是中断向量表的地址,这些地址是规定好的,不能自己更改。

异常优先级
当多个异常同时发生时,有一个固定的优先级来决定哪一个先被执行。
高优先级
1. Reset
2. Data abort
3. FIQ
4. IRQ
5. Prefetch abort
低优先级
6. Undefined Instruction,Software interrupt
发布者:全栈程序员-用户IM,转载请注明出处:https://javaforall.cn/131367.html原文链接:https://javaforall.cn
【正版授权,激活自己账号】: Jetbrains全家桶Ide使用,1年售后保障,每天仅需1毛
【官方授权 正版激活】: 官方授权 正版激活 支持Jetbrains家族下所有IDE 使用个人JB账号...
